一种新型水陆空潜四栖遥控机器
2016-10-25褚福硕王智华许少博杨三永
褚福硕,王智华,许少博,杨三永
(广东海洋大学海洋与气象学院,广东 湛江 524088)
一种新型水陆空潜四栖遥控机器
褚福硕,王智华,许少博,杨三永
(广东海洋大学海洋与气象学院,广东湛江524088)
为解决目前海洋上机器自动化探查技术中分离式技术的不成熟与作品设计的缺陷问题,对水陆空三栖遥控机器进行改进,通过六轴多旋翼飞行器以及万向轮并加入潜水模块,增加机械自动化探查功能并实现水陆空潜四栖的可行性。该四栖遥控机器通用性强,不停留于模型不变的老旧模式,同一车体通过简单的结构变化能实现水陆空潜四栖运动,相比普通两栖有更多的功能,同时设计轻巧,减少了机器探查技术因分离式探查而带来的器械成本,其简单的操作运行模式更具研究价值。
四栖;遥控;飞行器;潜水
目前国内外关于多栖跨海空飞行器的研究着重在大型可应用军事型无人机的开发,如2008年10月美国先期研究计划局(DARPA)提出了一种融合飞机空中飞行能力、水面航行能力,以及潜艇水下航行能力的混合飞行平台的设想(图1),但因受限于大型潜水器上动力系统和结构布局等难题,故还需长时间的研究才能实现。国内关于大型多栖飞行器上的研究中外形设计多于技术开发,关键技术还不成熟,并且关于多栖飞行器的研究尚未开展,故对于大型多栖遥控的关键难题仍有待深入研究。
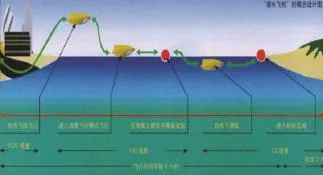
图1 DARPA的“遥控潜艇”概念设计图[1]
目前用于各种用途的遥控飞行器层出不穷,但是能把各种功能集于一体的遥控器却为数不多,本文着眼于小型可应用的基于无线电遥控技术(RC)多栖飞行器的研究,将各类用途的飞行器整合在一起,设计出一种适应水陆空潜四种不同环境的遥控机器,该遥控机器能持续完成各种不同环境的工作任务,从而大大降低多栖探查工作的复杂性。
1 结构组成
水陆空潜水四栖遥控机器系统由陆地系统,飞行系统,潜水系统3部分组成,成品如图2所示。
1.1潜水系统组成及原理
1.1.1沉浮系统组成及原理包括水袋,沉浮控制器,六通道遥控设备,主要工作原理是基于无线电遥控(RC)潜艇中的水泵系统。水泵系统是RC潜艇中常见的一种潜水系统,其原理是基于水泵对水做功来达到向艇内引入(排出)水的目的。如图3所示,水泵串联电磁阀,控制板并联水泵与电磁阀,水泵吸水时电磁阀解锁,控制板控制吸水速度和吸水量以完成下沉;之后电磁阀锁定,水泵停止吸水,潜艇实现动态悬浮;当潜艇潜水超过可控范围后,控制板会自动控制水泵抽水,从而使潜艇浮到水面。

图2 四栖遥控机器成品图
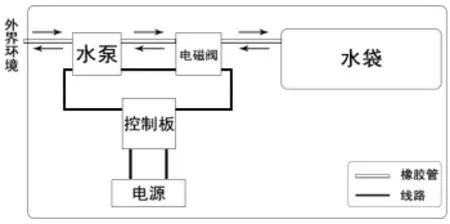
图3 水泵沉浮系统原理所示
1.1.2密封舱组成主要包括锂电池,72 MHz接收机,电子调速器(电调),电机,舵机,沉浮系统等(如图4所示)。锂电池为潜艇提供动力,电调连接电机通过RC接收机控制电调实现对电机转速的控制,完成对潜艇速度的调控;接收机连接舵机和螺杆,密封舱外的螺杆连接两个方向舵,完成对方向的控制。

图4 密封舱内部原理
1.1.3水面及水下力学分析如图5~图7,受浮力微大于重力作用,在水面上飞行器浮在水面并靠尾部螺旋桨产生动力,当通过控制器使水泵吸水时,飞行器重力上升,根据阿基米德浮力原理,浸入静止流体(气体或液体)中的物体受到一个浮力,其大小等于该物体所排开的流体重量,方向垂直向上并通过所排开流体的形心,而飞行器在此过程中体积不变,浮力不变,潜艇下沉,当浮力等于潜艇重力时,潜艇在水下实现动态平衡。
潜艇无横倾、无纵倾状态的平衡方程如(1)式所示:

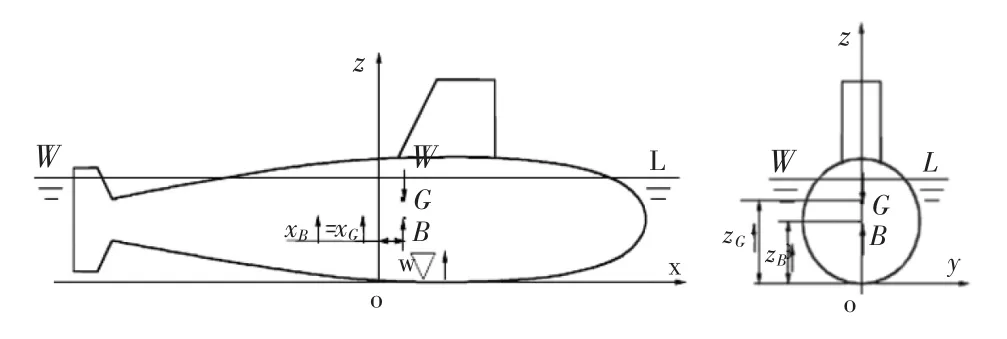
图5 潜艇平衡状态(W=浮力,G=重力,B=横倾)

图6 潜艇纵倾平衡状态
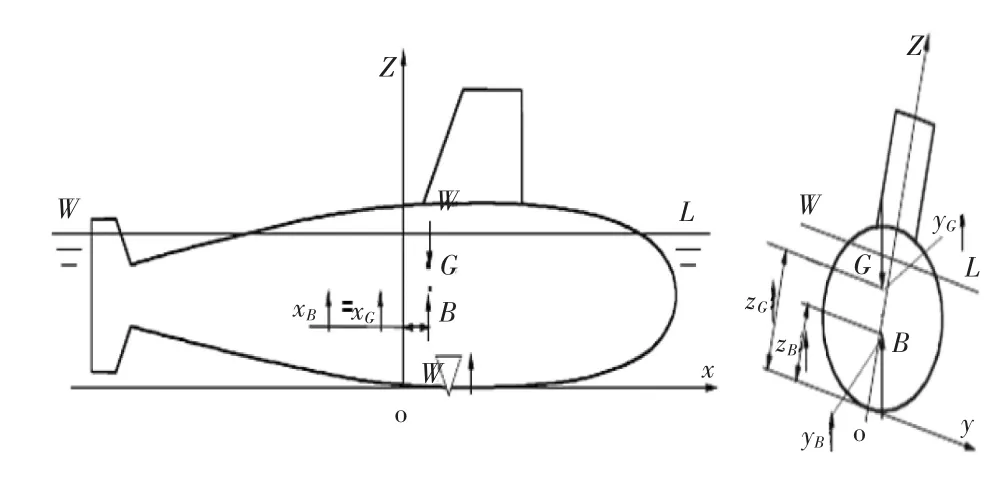
图7 潜艇横倾平衡状态
1.2空中运作原理及组成
1.2.1六轴组成常见的六轴部件组成,即螺旋桨,电机,电调,锂电池,飞行控制器和遥控系统。
1.2.2六轴飞行原理六旋翼飞行器每个旋翼在产生升力的同时也会产生相对于机体轴的反扭矩,因此6个旋翼产生的反扭矩就组成了飞行器的偏航力矩,当反扭矩相互抵消时,即可实现偏航稳定控制,电机1、3、5逆时针旋转的同时,电机2、4、6顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消,即在物理上实现偏航力矩接近于0,而且通过飞行控制器改变旋翼的转速保证飞行器姿态的保持[2],如图8~图9所示。

图8 六轴飞行器螺旋桨旋转方向
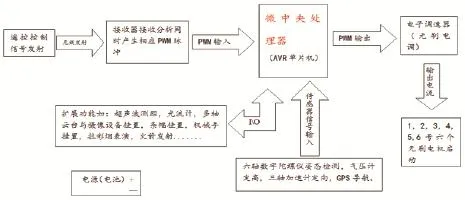
图9 六轴飞行器控制原理
1.2.3结构特性六轴飞行器是一个在空间具有6个活动自由度(分别沿3个坐标轴作平移和旋转动作)但只有6个控制自由度(6个电机的转速)的系统,因此被称为欠驱动系统(只有当控制自由度等于活动自由度时才是完整驱动系统),不过对于姿态控制本身(分别沿3个坐标轴作旋转动作)而言是完整驱动的。与直升机相比,六轴飞行器可以实现的飞行姿态较少,但是基本的前进、后退、平移等状态都可以实现,另外六轴飞行器的机械结构远远比直升机简单,维修和更换的开销也非常小,这让六轴飞行器有了比直升机更大的应用优势。
1.2.4自动控制原理机器通过算法[3]计算保持运动状态所需的旋转力和升力,通过电子调控器来保证电机输出力保持飞行器的稳定飞行,在六轴飞行器上装有3个方向的陀螺仪和三轴加速度传感器组成的惯性导航模块,可以实时计算出飞行器相对地面的姿态以及加速度、角速度,飞行控制的力。
1.3陆地运作原理及组成
1.3.1陆地结构组成由万向轮及六轴飞行器组成。
1.3.2工作原理通过六轴加装万向轮,螺旋桨在低速运行下进行控制前进及方向,并在遇到路上行驶较大的障碍物的时候加大转速脱离地面来绕过障碍物。
2 关键技术及其整体布局
2.1潜水与飞行的结合
该遥控机器的关键技术之一是飞行和潜水的结合,即将六轴多旋翼飞行系统与RC潜水系统相结合,飞行器的特点是轻巧、灵活,而潜艇的特点是笨重,因此对于多栖飞行器来说,若多旋翼飞行器飞行拉力不够则影响稳定性,过重则多旋翼飞行器的牵引力不足以使飞行器起飞,故采用拉力更大的六轴多旋翼飞行器,舍弃用潜艇外壳,牺牲掉最理想流线型结构,仅在亚克力管头部与尾部制作成流线型,虽然潜艇在水下阻力增大,最大速度减小,但做到了可以在水面及以下潜水和在空中飞行。另外,还在六轴下加装了万向轮,使之可以利用六轴飞行器在陆地上进行行动,完成四栖的操作。
2.2密封
目前对于潜水器的开发与研究问题之一主要集中于防水与整体结构布局当中。该设计以浅海为主要定位目标,关键技术侧重于防水。复杂的电子结构在遇到水后会发生短路,但在该航行器中,采用市面上704密封胶和百得胶,结合部分胶条扎带后,将各种无法在水中运行的电子设备密封于防水装置——亚克力管中,并用金属箍固定亚克力管与六轴飞行器机架,样品唯一会暴露于水中的电子部分仅为用于飞行及水中与水面行驶用的无刷电机,而由于无刷电机没有电刷,也就没有电刷遇水短路的危险。另外电机定子绕组都以绝缘导线缠绕形式安装在电机壳内,绕组的自身绝缘性很好,防水性能优异,故整个器械做到了良好的防水功能。
2.3整体结构与布局
样品整合时的布局会影响样品运行稳定性与可行性,其中主要涉及到潜水部分的重心以及搭载潜水部分的飞行器重心的调节问题。该样品将潜水部分固定于飞行机架下方其中一对角上两个电机的支架上。这样设计稳定性强,且在重心的调节方面飞行模块和潜水模块可同步而不用分开调节,且其余两对电机下方安装万向轮也不会影响到机翼和潜水模块螺旋桨的运行。另外需要说明的是,若该器械运用于海洋勘探、采样及仪器的投放与回收,可能还会涉及到器械本体的用材更换与外形的重设计、海洋专业装置的安装、动力装置与运行机制的改变、无线电作用于水中的衰减等问题,这些都有待以后的进一步研究。
3 航程与功耗
如图10~图11,由于海水阻力以及机器非流线型的结构作用,使之在水中航行功耗较大,对水中电池的消耗与遥控器档速的设定进行评测,可见受潜艇重力影响,飞行器在空中耗能较飞行器在水面下功耗高。

图10 电池功耗与档速关系

图11 飞行器航程与档速关系
4 技术应用分析及发展前景
传统的海洋勘探基本以非人工智能化为主,例如海洋浮标如自沉浮式剖面探测浮标 (Argo浮标),虽然功能强大,但是造价相对昂贵,而且对于海洋基本的远距离探测需要,在使用卫星及人工捕捞获取数据外,基本无法实现远距离人工操作回收仪器的功能。该多旋翼完成了对仪器的回收工作,并可以将该机器作为一种平台,在相关技术更加成熟后加装相应仪器,来完成一些海洋探测的基本需要,使海洋探测成本大大降低。
就目前,海洋采样非常复杂,即使对于轻型海洋仪器来说每次的基本采样工作都要求科考船到达确定地点,释放海洋仪器,待数据测得后继续前往下一个目标,这样不可避免地会产生时间、成本的消耗。该仪器携带轻型海洋仪器(如温度传感器)后,可以灵活的从指定船地点飞到海面及水下,完成工作后,再由人工操作回收仪器,若在此基础上加装市面上技术成熟的航拍系统,不仅可以完成陆地区域的拍摄工作,而且可以拍摄海上及近海面的图像,从而达到了拍摄系统的整合。

图12 Argo 浮标工作流程图[4]
5 小结
本装置以整合为切入点,主要考虑将市面上已经研究出的潜水以及飞行及陆行整合为一体,并加入了潜水模块,使机器实现海陆空潜全方位遥控。并在此基础上改进了四栖切换,不停留于模型不变的老旧模式,实现了高效运作。
该四栖遥控机器通用性强,同一车体通过简单的结构变化能实现水陆空潜四栖运动,相比普通两栖有更多的功能。体积中等,结构紧凑,无需外界工具,同时设计轻巧,使其简单的操作运行模式更具研究价值;相对现有两栖装置,该装置的潜水式运行方式,具备更高机动性;采用防水封装材料,使机器在水下亦能执行任务,具有更好的环境适应能力。与传统装置相比,本装置的优势主要体现在多功能、潜水等方面。目前在市面还无此产品的技术规模,国内对遥控技术的掌握也仅限于水上和陆地,国外也没有与四栖类相对应的产品。
虽然对各种功能的整合突出了该机器的整体优势,实现了四栖运行,但目前各单独部分还达不到最佳性能(如控制深度范围限制在2 m内),因此,在提高产品性能和加装仪器设备并运用于实际等方面还有待进一步的研究。
[1]朱莎.水空两用无人机动力系统设计与研究[D].南昌:南昌航空大学,2012.
[2]杨成顺.多旋翼飞行器建模与飞行控制技术研究[D].南京:南京航空航天大学,2013.
[3]刘建威.六旋翼飞行器容错控制算法[J].山东工业技术,2015(1):11-13.
[4]余立中,商红梅,张少永.Argo浮标技术研究初探[J].海洋技术,2001,20(3):34-40.
[5]王强.小型无人直升机航拍系统设计与实现[D].上海:上海交通大学,2013.
Design of a New Type of Remotely Controlled Tetraphibious Vehicle for Land,Water,Air and Underwater Applications
CHU Fu-shuo,WANG Zhi-hua,XU Shao-bo,YANG San-yong
College of Ocean and Meteorology,Guangdong Ocean University,Zhanjiang 524088,Guangdong Province,China
Currently,automated detecting technologies are going through a separating technological stage,and even the triphibious remotely controlled vehicles have not been applied in detection due to immature technology and defects of works.In order to resolve this problem,the traditional remotely controlled triphibious vehicle is improved in this study by developing a hexaxial multi-rotor aircraft and omni-directional wheel and adding a submersible module,so as to augment the mechanically automated detecting function and realize the feasibility of land,water,air and underwater applications.The presented remotely controlled tetraphibious vehicle is suited to multi-purpose applications,compared with onefold function of ordinary amphibious vehicle.Through simple structural adjustment,it can realize land,water,air and underwater motions.In addition,the costs brought about by separating detection will be reduced.Featured by concise design,the operation mode of the tetraphibious vehicle is valuable for the development of marine detecting technologies.
tetraphibious;remotely controlled vehicles;aircraft;submersible
P742
A
1003-2029(2016)02-0015-05
10.3969/j.issn.1003-2029.2016.02.003
2015-10-22
广东大学生科技创新培育专项资金资助项目(pdjh2015b0245)
褚福硕(1995-),男,本科,研究方向海洋技术,海洋内波。E-mail:fushuo027859@163.com