固定翼飞行器自主着陆中视觉算法的研究
2016-10-22徐宽王新华蔡俊华吴赛飞
徐宽,王新华,蔡俊华,吴赛飞
(南京航空航天大学江苏南京211106)
固定翼飞行器自主着陆中视觉算法的研究
徐宽,王新华,蔡俊华,吴赛飞
(南京航空航天大学江苏南京211106)
固定翼无人机自主着陆引导系统有跟踪速度快、精度高的特点,本文设计并搭建一套基于Adaboost视觉算法的自动着陆引导系统。文中首先介绍了视觉着陆引导系统的原理、组成,并分析其数学模型,其次在使用机器学习Adaboost算法的基础上,通过使用高斯分布模型以及基于距离的聚类算法提高对单飞行器和多飞行器的识别精度。最后通过仿真实验对视觉识别算法的可靠性,精度进行验证。得到本文设计的自主着陆系统很好的满足固定翼飞机自主着陆的需求的结论。
飞行器控制;导航技术;机器视觉;Adaboost算法;聚类算法;自主着陆
自动着陆是固定翼无人飞行器整个自动飞行过程中最危险也是要求最高的过程。目前无人飞行器着陆普遍采用基于GPS导航的方式,虽然精度高、使用简单[1-2],但信号易受无线电信号的干扰并易丢失。机器视觉的迅速发展为解决这个问题提供了新的途径。视觉导航通过传感器获取图像信息,并通过图像处理获取飞行器的位置信息[3]。目前,很多学者设计的视觉引导方案都是放在无人飞行器上,不仅增加了重量,而且因为图像处理能力不强,效果并不显著。
文中针对固定翼无人飞行器设计并搭建一套路基视觉引导系统,精度适中,成本低[4-5]。
Adaboost算法有较高的识别准确度,但是通过单纯的调节Adaboost函数参数容易因为飞行器姿态,方位的变换而产生识别误差,同时在复杂空域环境下也不能做到准确的识别。所以本文在视觉算法中通过使用高斯分布模型和K-means基于距离的聚类算法,很好地提高对飞行器的识别精度,为之后的着陆引导做好准备。
1 视觉引导原理
1.1视觉着陆引导系统
文中设计的视觉着陆引导系统由两个图像跟踪分系统组成,图像跟踪系统由摄像机和高精度二轴云台(PTU)组成并分别置于跑道两侧[6],如图1所示,利用图像跟踪技术在图像中检测识别并跟踪无人飞行器,并精确记录云台偏转角度。利用两云台俯仰航向角度及云台间的距离,经过几何关系解析和三角计算可确定无人飞行器的相对空间位置,然后通过数传将无人机的位置信息发送给无人飞行器,从而引导无人飞行器精确着陆。
1.2模型解析
我们假设地面坐标系原点在系统中的某台摄像机镜头中心(如左摄像机),光轴X平行于跑道,Y轴垂直于跑道,Ol和Or是左右摄像机镜头中心,OlOr为系统基线(两云台间的距离)。αl,βl,αr,βr分别代表左右两侧云台的俯仰角和航向角。假设云台在初始位置时,αl=0,αr=0,βl=0,βr=0,顺时针方向转动为正。P为飞机所在位置,Q是P在XOY平面的垂向投影,设QR=h,OlOr=D,俯仰角αl,αr航向角βl,βr可从视觉着陆引导系统的云台中直接获取。

图1 视觉导航系统
2 图像处理和视觉跟踪
2.1AdaBoost算法分析
Adaboost是一种迭代算法[7],其核心思想是通过是针对同一训练集训练不同的分类器,通过这些弱分类器的集合形成一个新的分类器。同时,由于采取级联结构,大多数负样本会在前面比较简单的级次中被略过,同时将前一级被误识的负样本作为下一级次负样本的训练样本。完整的Adaboost算法如下:

同时因为Adaboost为级联过程,因此可以认为,当Adaboost使用的正样本,负样本足够多的时候,且有一定数量的级联结构的情况下,使用Adaboost算法的检测错误率几乎等于0。
在以往的经验中,我们往往是通过改变Adaboost函数中的限定参数来达到精确识别的目的。但这些在实际工程运用中并不现实,因为不可能完成对所有飞行器的正样本的采集,也无法每时每刻都给出最佳的限定参数值。
2.2单飞行器AdaBoost算法改进

2.3多飞行器算法分析及改进
在空域较为复杂的环境中,如出现多架无人飞行器时,只使用Adaboost算法无法为识别的准确度与精度上提供保证。而通过一种基于距离的聚类算法可以提高在这一复杂情况下的识别的准确度与精度,聚类算法如下:
1)对于图像上的m个特征点Pi(x,y),随机取出k个特征点,作为聚类中心点。然后遍历计算其余特征点到聚类中心点的距离‖Pi(x,y)-mj(x,y)‖,i∈[1,m],j∈[1,M]。对于点Pi(x,y)的分类原则找到距离各自最近的聚类中心点,将其加入到该聚类中。这样我们得到最初的聚类结果,也就是第一次迭代过程。
2)我们根据更新后聚类结果,重新计算每种聚类中心。之后重新遍历其余特征点到该聚类中心的距离,根据其到各聚类中心是否为最短距离重新进行分类。
3)之后重复步骤2),直到收敛。即前后两次的聚类中心不变或是小于一定值。
同样假设,如在两架无人飞行器的复杂情况下,用Adaboost的识别结果应该遵循这样的分布:在真实飞机存在的地方,其被识别出来的概率应该最大。因此聚类算法流程如图2所示。

图2 K-means聚类算法流程图
3 视觉着陆引导控制
视觉着陆引导控制包括纵向和侧向着陆控制:
当视觉引导系统给出的高度Hs与理想基准下滑轨迹Hc不一致时,则出现着陆高度偏差Her,经引导律计算处理并发送给无人飞行器,通过飞行控制系统来控制飞机的姿态(△θ),使无人飞行器飞行高度不断跟踪基准的下滑轨迹Hc,从而完成对高度的纠偏。
当视觉引导系统测得无人飞行器的轨迹相对于理想轨迹有侧偏,则形成误差信号yer,通过无人飞行器轨迹控制器[8]计算得到航向角偏差△φ,无人飞行器上的侧向飞行控制系统收到该指令后操纵无人飞行器不断修正航迹,以最终消除侧偏。
4 视觉算法仿真实验及结果分析
4.1仿真实验方案
对于随机搜集到的飞机图片及降落视频,使用由相同的正负样本所训练出来的分类器(分类器由597个正样品,1 470个负样品训练所得):
1)对于单飞行器的情况,比较由只使用Adaboost算法的识别结果与嵌套使用高斯分布模型之后的Adaboost算法的识别结果,并记录数据,绘制表格分析;
2)对于由复杂空域环境下的情况(本文中假设2架飞行器),比较由只使用Adaboost算法的识别结果与嵌套使用K-means聚类算法的Adaboost算法的识别结果,并记录数据,进行分析,及提出改进意见。
4.2单飞行器的仿真结果及分析
1)只使用Adaboost的检测结果如图3所示。

图3Adaboost检测结果
2)置信水平为0.99,对于单张图片的检测结果如图4所示。

图4 改进Adaboost检测结果
3)只使用Adaboost函数处理降落视频检测结果:
组1:参数设计min_neighbor=8;min_size=cvSize(40,40),总帧数:107。如表1所示。
组2:参数设计min_neighbor=15;min_size=cvSize(50,50),总帧数:2173。如表2所示。
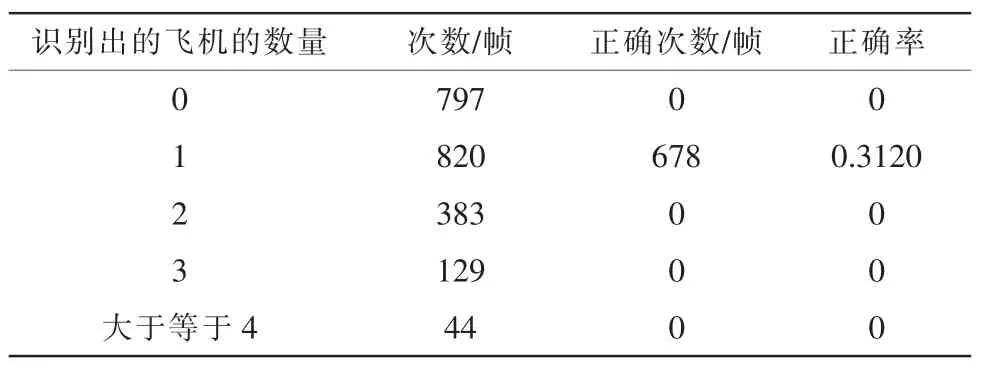
表2 组2 Ababoost检测结果
组3:参数设计min_neighbors=8;min_size=cvSize(80,80),总帧数:1109。如表3所示。
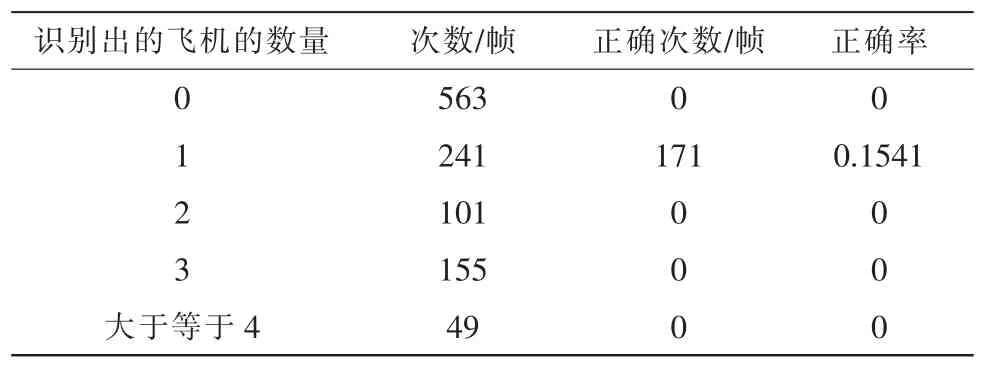
表3 组3 Ababoost检测结果
组4:参数设计min_neighbors=2;min_size=cvSize(35,35),总帧数:595。如表4所示。

表4 组4 Ababoost检测结果
4)在置信水平为0.99,改进算法处理降落视频的检测结果,如表5所示。

表5 置信水平0.99降落视频结果表
分析:
1)对于单张图片,在嵌套使用高斯分布模型之后,Adaboost算法的识别准确度得到了明显的提高。且对识别速度的影响并不大,可以满足飞行系统的要求。
2)通过分析比较在两种算法在降落视频中的识别正确率,可以认为:在没有足够的正负样本的情况,通过假设在一定条件下所有Adaboost函数识别出的飞机位置的错误率符合高斯分布模型,并以此来求解飞机的坐标,用这种方法可以大幅的提高Adaboost算法识别的正确率。
4.3多飞行器的仿真结果及分析
1)Adaboost多飞行器检测:
Adaboost检测结果如图5所示
图5的参数设计:min_neighbors=6;min_size=cvSize(50,50);

图5Adaboost多飞行器检测结果
K-mean算法检测结果如图6所示。

图6K-mean算法检测结果
由实验结果分析可知在使用K-means算法对Adaboost的检测结果进行处理之后,可以有效的提高识别的准确度,精确度。
2)算法改进与提高
但并不是所有的识别效果都是如此。首先若直接使用Adaboost算法,在不同的情况下,对应的最佳识别效果的参数设计往往是不同,而我们很难在使用过程中调节函数中的参数来得到我们想要的效果。同样在使用聚类算法对Adaboost算法结果进行处理时,因为认为每个样本分布所占的权重是一样,就会出现识别的误差。如图7中两架飞机相对于摄像头的距离不一致的时候,距离较远的那架飞机的特征点会被距离较近的飞机的特征点所影响,从而出现差偏。

图7 双机Adaboost算法
对于这个问题,可以通过增加Adaboost的训练样本数来提高识别的准确度,如图8中使用的分类器由797个正样品,1970个负样品训练所得。如图8所示,其识别结果得到了明显的改进。

图8 双机改进Adaboost算法
5 结论
文中针对固定翼无人飞行器在自动着陆时速度快、精度要求高的特点,设计并搭建了一套基于Adaboost算法的无人飞行器自动着陆引导系统。并通过高斯分布模型和基于距离的聚类算法有效地提高了视觉识别算法的准确度,精确度。最后通过仿真实验对该算法进行了验证。实验结果表明,该算法可以为固定翼飞行器的自主着陆提供有效的支持。
[1]Weiwei Kong,Daibing Zhang,Xun Wang.Autonomous Landing of an UAV with a Ground-Based ActuatedInfrared Stereo Vision System.IEEE International Conference on Intelligent Robots and Systems,2013:2963-2970.
[2]吴显亮,石宗英,钟宜生.无人机视觉导航研究综述[J].系统仿真学报,2010,22(1):62-65.
[3]丁萌,曹云峰.利用计算机视觉获取无人机飞行姿态角[J].传感器与微系统,2007,26(11):65-68.
[4]于永军,徐锦法,张梁,等.惯导/双目视觉位姿估计算法研究[J].仪器仪表学报,2014,35(10):2170-2176.
[5]Madison R W,Andrews G L,DeBitetto P A,et al.Visionaidednavigationforsmalluavsingpschallenged environments[J].The Draper Technology Digest,2008:4.
[6]Weiwei Kong,Dianle Zhou,Yu Zhang.A Ground-Based Optical System for Autonomous Landing of a Fixed Wing UAV[C]11.IEEE International Conference on Intelligent Robots and Systems,2014:4797-4804.
[7]李闯,丁晓青,吴佑寿.一种该进的Adaboost算法-AD Adaboost[J].计算机学报,2007,30(1):104-105.
[8]Park S,Deyst J,How J P.A New Nonlinear Guidance Logic for Trajectory Tracking[C]11 Proceedings of the AIAA Guidance,Navigation and Control Conference,2004.
Research on visual algorithm of fixed-wing aircraft automatic landing
XU Kuan,WANG Xin-hua,CAI Jun-hua,WU Sai-fei
(Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
Fixed wing unmanned aerial vehicle autonomous landing requires the guidance system with high speed and high precision.This paper designs and builds a set of automatic landing guidance system based on Adaboost algorithm.In this paper,the principle and composition of the visual landing guidance system are introduced,and the mathematical model is analyzed.Secondly,the recognition accuracy of single aircraft and multi aircraft is improved by using Gauss distribution model and distance based algorithm.Finally,the reliability and accuracy of the visual recognition algorithm are verified by simulation experiments.The simulation experiments show that the design of the autonomous landing system is good to meet the needs of the fixed wing aircraft autonomous landing.
control and navigation technology of aerocraft;machine vision;adaboost algorithm;clustering algorithm;autonomous landing
V249.1
A
1674-6236(2016)17-0035-04
2015-09-21稿件编号:201509145
徐宽(1994—),男,浙江绍兴人。研究方向:固定翼无人机着陆技术、视觉导航技术、飞行控制。
