无人机航摄系统在滩涂高程测量中的应用研究
2016-10-17张金华
张金华
(1. 上海市地质调查研究院,上海 200072;2. 国土资源部地面沉降监测与防治重点实验室,上海 200072)
无人机航摄系统在滩涂高程测量中的应用研究
张金华1,2
(1. 上海市地质调查研究院,上海 200072;2. 国土资源部地面沉降监测与防治重点实验室,上海 200072)
从理论高程精度的公式推导出发,阐述了像素分辨率和基高比是影响理论高程测量精度的主要因素,指出了理论高程精度对航摄系统的选择以及飞行参数的设计具有重要参考价值;进行了无人机航摄系统在滩涂高程测量中的应用试验,结果表明,无人机航摄系统的实际高程测量精度可以优于±15cm;最后通过理论高程精度和实测高程精度的对比分析,指出影像质量、像控精度以及空三解算精度等因素的优化是实测高程测量精度进一步提升的关键。
无人机航摄系统;滩涂高程测量;基高比;地面分辨率
作为上海市滩涂开发和后备土地资源研究的重要内容,滩涂地形的监测一直是海岸带地质环境监测工作的重要组成部分[1~5]。为保证滩涂地形的测量精度,目前,陆域滩涂地形的监测基本都是通过人工跑滩结合RTK测量的方式进行,上海市海岸带的陆域滩涂以淤泥质底质为主,且其露出范围受潮汐影响大,因此人工测量的作业效率比较低,安全风险比较大。
近年来,无人机(Unmanned Aerial Vehicle, UAV)航空摄影测量系统因具有自动化、智能化、快速获取等良好的性能被广泛应用于高精度测绘、灾后应急测绘、农村土地确权等测量领域。相比传统航空摄影测量系统[6],无人机航空摄影系统具有飞行高度低、像片的地面分辨率高等优点,目前该技术所取得的平面精度均能达到《低空数字航空摄影测量内业规范》中对其生产成果(数字线划图(DLG)、数字高程模型(DEM)和数字正射影像图(DOM)的A类精度要求[7],但是高程精度不达标的情况比较常见[8]。本文主要就无人机航空摄影测量系统在陆域滩涂高程测量中的应用可行性进行探讨。
1 航空摄影测量理论高程精度
航空摄影测量指的是在飞机上用航摄仪器对地面连续摄取像片,结合地面控制点测量、调绘和立体测绘等步骤,绘制出地形图的作业。其单张像片测图的基本原理是中心投影的透视变换,见图1(a)。
由此几何关系可知

其中,f为相机焦距,H为摄影航高,m为摄影比例尺,a为像元尺寸,GSD为像片的地面分辨率,即一个像元对应的地面尺寸。

图1 单张像片的中心投影(a)和立体像对几何关系(b)Fig.1 The central projection of single image (a) and the geometrical relation of stereo pair (b)
摄影过程的几何反转则是立体测图的基本原理,见图1(b)。由其几何关系可以得到:
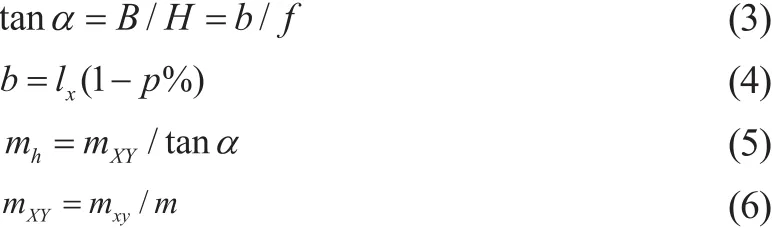
其中B为摄影基线,b为影像基线,lx为影像宽度,p%为航向重叠度,α为交会角,B/H为基高比。
假设像点的坐标量测精度mxy为1/k个像素尺寸,即:

以上我们推导了航空摄影测量的理论高程精度,从式(9)可以看到,摄影测量的高程精度与相机的像素大小、坐标量测精度、摄影高度、影像像幅、航向重叠率等因素相关。但是在实际作业过程中,影响航摄高程精度的还有影像的质量、像控的精度、空三的解算精度等因素,但是理论高程精度可以在飞行外业前计算得到,对选择像素较小、影像像幅较大的航摄系统,优化设计摄影高度、航向重叠度等飞行参数有很好的参考和指导作用。
2 无人机滩涂高程测量应用
为了解无人机航空摄影测量系统在滩涂高程测量中的实际应用效果,本文选择上海市横沙岛新吹填的滩涂作为试验场地。该试验场地主要以光滩为主,无植被覆盖,范围大小约为750m×750m,同时该区域设有RTK基站和若干平高控制点,有利于像控点和检查点的布设。
2.1滩涂高程测量实际精度
本次试验所采用的无人机航摄系统主要有天宝UX5HP和碳基蓝鸟两种,两者采用相同的像控点布设方案,并布设了60个人工RTK测量检查点对其高程成果进行比对,本次试验所涉及的主要航摄系统参数、飞行参数以及高程比对结果见表1。

表1 试验情况及高程比对结果Table 1 Test parameters and height comparison results
试验区域RTK测量的平面精度优于±5cm,高程精度优于±10cm,根据以往人工RTK测量滩涂的数据,其高程精度为±5cm~±10cm。从表1可以看到,两款无人机航摄系统的高程实测精度相当,虽然比人工RTK测量的精度低,但是高于1:500比例尺DEM生产成果±35cm的精度要求。
2.2滩涂高程测量理论精度
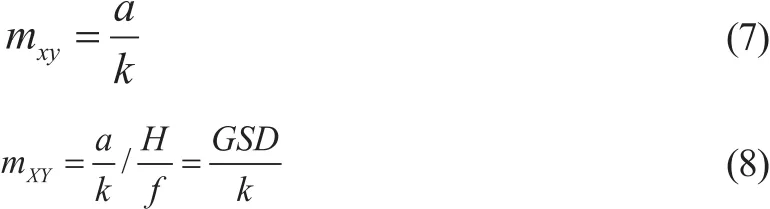
数码像片的坐标量测精度mxy可以达到1/3~1/2个像素尺寸[9],这里取1/k=1/2的像素尺寸作为像片的量测精度mxy。本文根据表1的参数和前面推导的相关公式,计算了地面分辨率GSD、影像基线b、基高比(B/H)、理论高程精度mh等因子,见表2。
在不考虑像片质量、像控精度、空三解算精度的情况下,两款无人机航摄系统的理论高程精度均优于±10cm,在一定程度上反映了目前无人机航摄系统的高程测量水平。
表2 理论高程精度涉及的相关参数Table 2 The related parameters of theoretical elevation accuracy
2.3高程测量精度对比分析
相对传统的航空摄影测量系统,无人机航摄系统的像幅小、基线短,基高比小[10,11],但是其理论高程精度并不低,这主要是得益于其飞行高度低,像片的地面分辨率高。
天宝UX5HP的相机配置要比碳基蓝鸟的高,像片的地面分辨率高,但是其航向重叠度太高,降低了基高比,影响了其高程测量精度。因此,从这个意义上说,航向重叠度也不是越高越好。
两款无人机航摄系统的基高比相差1倍,但是两者的理论高程精度和实际高程测量精度都比较接近,说明不能简单地以基高比的大小来评判无人机航摄系统高程测量精度的高低。
通过两款无人机航摄系统实际高程测量精度和理论高程精度的对比,可以发现,实际高程测量精度要远远低于理论高程精度,反映出像片的质量、像控布设精度、空三解算精度等因素对于高程实测精度的影响是很大的。如何提高影像质量、像控精度和空三解算精度,是提高实测高程测量精度的关键。
本次试验中,像控点和检查点的高程测量都是通过RTK实现的,这些控制点本身就有±5cm~±10cm的误差,因此,这在一定程度上也影响了无人机航摄系统真实的高程测量精度。如果像控点的高程精度能进一步提高,获得的无人机航摄系统高程测量精度会更加客观。
3 结论与展望
无人机航摄系统的理论高程精度虽然只是影响实际高程测量精度的一个方面,但是其反映了航摄系统的高程测量精度水平,其最重要的意义在于能在航摄飞行设计阶段为相关参数的选择和设置提供有力的依据。
本次试验表明,无人机航摄系统在地形比较平坦、无植被的滩涂区域进行高程测量时,其实测精度能达到优于±15cm的水平。但是本次试验没有对像片质量、像控精度等方面进行深入研究,因此,如果在这些方面能有所优化,如采用精密水准代替RTK技术进行像控点的高程测量等等,无人机航摄系统的高程测量精度有望会有进一步的提升。
无人机航摄系统虽然存在像幅小、基高比低等不足,但是其飞行高度低,像片的地面分辨率高,使其高程测量精度可与传统航摄系统相媲美,甚至更高。因此,单从测量精度上讲,无人机航摄系统也具有很广阔的应用前景。
(References)
[1] 黎兵,何中发. 海岸带地质环境监测体系建设与管理的构想——以上海海岸带为例[J]. 上海地质,2010,31(1):6-10,20. Li B, He Z F. Ideas of construction and management of coastal geoenvironmental monitoring system: Case of Shanghai[J]. Shanghai Geology, 2010,31(1):6-10,20.
[2] 施玉麒,王寒梅,李金柱. 上海市海岸带资源现状与未来趋势[J].上海地质,2003,24(1):8-16. Shi Y Q, Wang H M, Li J Z. The actuality and trend for the coastal belt's resource of Shanghai[J]. Shanghai Geology, 2010,31(1):6-10,20.
[3] 陈基伟,梅安新,袁江红. 从海岸滩涂变迁看上海滩涂土地资源的利用[J]. 上海地质,2005,26(1):18-20,28. Chen J W, Mei A X, Yuan J H. Using of land resources in Shanghai in consideration of seashore beach changes[J]. Shanghai Geology,2005,26(1):18-20,28.
[4] 许伟. 多功能视角下的上海市岸线资源适宜性评价研究[J]. 上海国土资源,2016,37(1):14-18,23. Xu W. Suitability evaluation of the coastline resources in Shanghai from a multifunction perspective[J]. Shanghai Land & Resources,2016,37(1):14-18,23.
[5] 廖远琴. 上海市耕地后备资源宜耕性调查评价[J]. 上海国土资源,2016,37(1):19-23. Liao Y Q. The investigation and evaluation of the suitability of reserved cultivated land resources in Shanghai[J]. Shanghai Land & Resources, 2016,37(1):19-23.
[6] 王树根. 摄影测量原理与应用[M]. 武汉:武汉大学出版社,2009. Wang S G. The principles and application of photogrammetry[M]. Wuhan: Wuhan University Press, 2010.
[7] 低空数字航空摄影测量内业规范:CH/Z3003-2010[S].北京:测绘出版社,2010. Specification for office operation of low altitude digital aerophotogrammetry: CH/Z3003-2010[S]. Beijing: Surveying and Mapping Press, 2010.
[8] 毕凯,李英成,丁晓波,等. 轻小型无人机航摄技术现状及发展趋势[J]. 测绘通报,2015,(3):27-31. Bi K, Li Y C, Ding X B, et al. Aerial photogrammetric technology of light small UAV: status and trend of development[J]. Bulletin of Surveying and Mapping, 2015,(3):27-31.
[9] 沈方雄,刘祥发,刘幼华,等. 影响航测高程精度的关键因素分析与探讨[J]. 人民长江,2014,45(16):60-62. Shen F X, Liu X F, Liu Y H, et al. Analysis and discussion on key influential factors of aerial survey elevation accuracy[J]. Yangtze River, 2014,45(16):60-62.
[10] 王荣宝. ADS40/80数字航摄仪特点及应用研究[J]. 测绘与空间地理信息,2012,35(4):143-145. Wang R B. Research on the application and features of ADS 40/80 digital aerial photographic camera[J]. Geomatics & Spatial Information Technology, 2012,35(4):143-145.
[11] 谢建春,孙丙玉,李文清,等. 一种低空无人机航摄系统关键技术的试验研究[J]. 测绘通报,2015,(10):85-87. Xie J C, Sun B Y, Li W Q, et al. Research on application of key technology of low-altitude UAV aerial photography system[J]. Bulletin of Surveying and Mapping, 2015,(10):85-87.
A pilot study on the application of a UAV aerial photography system in the tidal flat elevation
ZHANG Jin-Hua1,2
(1. Shanghai Institute of Geological Survey, Shanghai 200072, China;
2. Key Laboratory of Land Subsidence Monitoring and Prevention, Ministry of Land and Resources of P. R. China, Shanghai 200072, China)
Firstly, we derived a formula for the theoretical elevation precision, based on aerial photography technology. This makes it clear that the image resolution and the baseline height ratio are the main factors that affect the theoretical elevation precision. It is pointed out that the theoretical elevation precision has great value for the selection of the aerial photography system and the setting of the flight parameters. Secondly, we conducted an experiment on the application of an unmanned aerial vehicle (UAV) aerial photography system in the tidal flat elevation. The test results showed that the actual elevation measurement accuracy of the UAV aerial photography system can be less than ±15cm. We also conducted a comparative analysis of the theoretical elevation accuracy and the measured elevation accuracy, and confirmed that the optimization of factors such as image quality, photograph-control points, measurement precision and aerial triangulation accuracy, are key to further improvement in the accuracy of elevation measurement.
unmanned aerial vehicle (UAV) aerial photography system; tidal flat elevation measurement; base to height ratio; ground resolution
P224
A
2095-1329(2016)03-0086-03
10.3969/j.issn.2095-1329.2016.03.020
2016-07-28
2016-08-26
张金华(1985-),男,硕士,注册测绘师,主要从事地面沉降测量研究及海岸带地质调查与监测研究.
电子邮箱: tianwei713_@163.com
联系电话: 021-56618218
国家公益性行业科研专项(201211009);国家海洋地质保障工程项目(GZH201200506)