基于ARMA-NExT和稳定图方法的飞行器工作模态指示研究†
2016-10-17王亮张妍周晓丽商霖朱辰蔡毅鹏
王亮 张妍 周晓丽 商霖 朱辰 蔡毅鹏
(中国运载火箭技术研究院, 北京 100076)
基于ARMA-NExT和稳定图方法的飞行器工作模态指示研究†
王亮†张妍周晓丽商霖朱辰蔡毅鹏
(中国运载火箭技术研究院, 北京100076)
研究了基于飞行遥测数据,使用环境激励模态辨识方法辨识系统的模态参数时,挑选真实模态的方法.首先,详细介绍了ARMA-NExT环境激励模态辨识方法的理论.接着,给出了模态指示因素,并详细分析了基于稳定图方法、频域和时频分析方法的真实模态筛选的方法.最后通过算例研究了飞行模态筛选的过程.研究发现,通过该方法得出结果与频域和时频分析结果基本一致.
模态辨识,ARMA,NexT,工作模态,稳定图
引言
航天工程中,为了与地面模态试验结果对比,改进设计,飞行器的飞行工作模态的辨识是很有意义的工作.但是由于飞行器在飞行过程中的激励无法精确测量,因此可以采用环境激励模态辨识技术.由于飞行器遥测数据的信噪比较差,因此使用环境激励模态辨识方法得出的模态丰富,因此如何在其中挑选出真实模态是个重要的工作.
学者们在环境激励下模态辨识方法做出了较多的研究.环境激励模态辨识技术的程序是:首先,进行采样;然后对采样数据进行自相关和互相关计,在进行多个测点的,模态参数识别处理中,需要选取某个测点做参考点.一般情况下,选取响应较小的测点做参考点,计算其它测点与该参考点的互相关函数.然后,将计算出来的互相函数作为输入数据,利用如ITD法、STD法、复指数法、ARMA模型时序法以及ERA法等时模态参数辨识方法进行参数识别.目前,该方法已应用于桥梁、高层建筑、汽轮机、飞机和汽车等的模态参数识[1~11].
综上所述,针对飞行器飞行工况下的结构动特性辨识问题,基于遥测振动数据,使用ARMA-NExT模态辨识方法研究了导弹飞行过程中的模态参数,针对真实模态筛选的问题,利用稳定图方法、频域和时频分析方法挑选出飞行过程中的工作模态.
1 模态辨识技术
N个自由度的线性系统激励与响应之间的关系可用高阶微分方程来描述,在离散时间域内,该微分方程变成由一系列不同时刻的时间序列表示的差分方程,即ARMA时序模型方程:
(1)
2N为自回归模型和滑动均值模型的阶次,ak、bk分别表示待识别的自回归系数和滑动均值系数,ft表示白噪声激励.当k=0时,设a0=b0=1.
ft是白噪声,故相关函数
(2)
式中σ2为白噪声方差.
因为线性系统的脉冲响应函数hi,是脉冲信号δ激励该系统时的输出响应,故由ARMA过程定义的表达式为
(3)
可以得出:
(4)
对于一个ARMA过程,当是大于其阶次2N时,参数bk=0.故当l>2N时,式(4)恒等于零,于是有
(5)
设相关函数的长度为L,并令M=2N.对应不同的l值,由代人以上公式可得一组方程:
(6)
采用伪逆法可求得方程组的最小二乘解,即
{a}=([R]T[R])-1([R]T{R′})
(7)
由此求得自回归系数ak(k=1,2,…,2N).
滑动平均模型系数bk(k=1,2,…,2N)可通过以下非线性方程组来求解:
(8)
(9)
式中:Ck为响应序列xt的自协方差函数.
当求得自回归系数ak和滑动均值系数bk后,可以通过ARMA模型传递函数的表达式计算系统的模态参数,ARMA模型的传递函数为
(10)
用高次代数方程求解方法计算分母多项式方程的根:
z2N+a1z2N-1+…+a2N-1z+a2N=0
(11)
求解得到的根为传递函数的极点,它们与系统的模态频率ωk,和阻尼比ξk的关系为

(12)
并且由式(12)可求得模态频率ωk,和阻尼比ξk,即
(13)
2 模态筛选方案
根据以上给出的ARMA模型,选定拟合阶次即辨识出飞行器的飞行工作模态,辨识的结果肯定包含了若干阶模态,且拟合阶次越高,拟合的模态阶次越多,但是如何从辨识的结果中挑选出真实模态是本文的研究内容.
本小节给出了从模态辨识结果中挑选出真实模态的方法,流程图如图1所示,描述如下:

图1 流程图Fig.1 The flow chart
a)通过稳定图剔除不稳定模态.调整ARMA模型拟合阶次,获得模态辨识结果的稳定图,与拟合阶次无关的模态一般为稳定模态,其余的与拟合阶次相关,肯定不是真实模态,因此据此剔除不稳定模态;
b)通过设置阻尼阀值提出不真实模态.由于工程结构的阻尼一般较小,阻尼值过大的模态一般不真实,因此据此剔除一部分不真实模态;
对比频域分析结果,获得最终模态.通过对比稳定模态、功率谱密度曲线和时频分析结果,获得最终的真实模态.
3 算例
图2给出了针对某一段遥测数据的模态参数辨识的计算流程.首先对数据进行预处理,再使用带通滤波筛选出待辨识频带的信号,再对信号进行重采样,减少信号长度,最后通过模态辨识方法进行模态辨识.

图2 计算流程Fig. 2 Calculation process
选择一段1s长度的信号,对其进行预处理,对信号处理后的功率谱密度分析结果和时频分析结果分别如图3和图4所示,从图上可以发现低频的谐振峰位置在45Hz和85Hz左右.由于原信号采样频率5120Hz,待辨识频带为100Hz以内,防止滤波边界限过于靠近待辨识模态,影响模态的辨识结果,因此选择带通滤波器频带选择为20Hz~200Hz进行滤波.
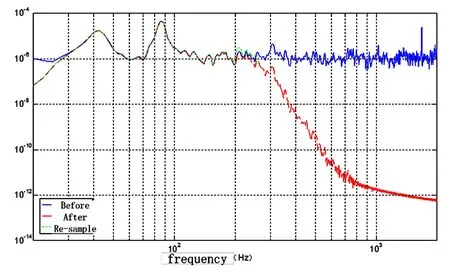
图3 处理前后参考点信号的功率谱密度曲线对比Fig.3 Comparison of the signal power spectral density at the reference point before and after preprocessing
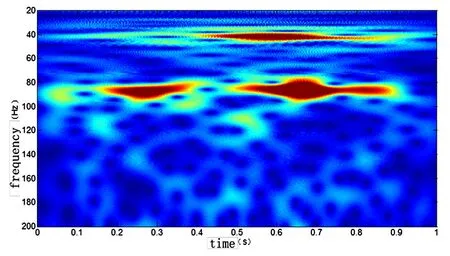
图4 时频分析结果Fig.4 The results of the time-frequency analysis
首先,选用不同的拟合阶次,使用ARMA模态辨识方法对各通道信号进行拟合,对拟合结果进行模态辨识.对多个通道从11阶到210阶进行拟合,模态频率的稳定图如图5所示.

图5 不同拟合阶次对于的模态频率稳定图Fig.5 The stability figure of modal frequency under different fitting order
从图5可以发现:
a)随着拟合阶次的升高,各阶模态分歧出现,在拟合阶次60阶后,稳定模态和非稳定模态逐渐清晰;
b)其中有21阶模态频率在各拟合阶次下较为稳定,其他模态频率较为散乱,与拟合阶次相关性较强,因此不是系统模态;
c)对比信号的功率谱密度曲线和时频分析结果,稳定模态的频率包含了前两者的谐振峰,但在功率谱密度曲线中的小鼓包也均被辨识成稳定模态频率,如55Hz、65Hz和75Hz等位置;
d)另外在低于45Hz左右的谐振峰也出现了较多稳定模态,但从功率谱密度曲线上并无小鼓包,因此辨识的模态阻尼值较大.
由于调整ARMA模型拟合阶次后,出现较多辨识结果,首先通过稳定图方法排除了一些虚假模态,但是剩余的稳定模态还是较多,因此下面通过辨识的阻尼特性再对稳定模态进行筛选.由于工程结构的结构阻尼一般较小,结构的阻尼值一般为1%~8%,因此以下对辨识的模态阻尼值大于50%的模态进行剔除,认为其为虚假模态.剔除虚假模态后的模态稳定图如图6所示.

图6 不同拟合阶次对于的模态频率稳定图(阻尼阀值50%)Fig.6 The stability figure of modal frequency under different fitting order(The damping threshold is 50%)
对比图5和图6可以得出以下结论:在46Hz前的模态的阻尼辨识值大于50%,因此被判定为虚假模态,与以上的分析一致.
在剔除大阻尼虚假模态后,最后通过对比稳定图、功率谱密度曲线和时频分析图,获得最终的真实模态,为表1中第9和10阶模态.

表1 模态频率辨识结果
从以上分析结果可以发现:最终获得的模态频率值基本与功率谱密度分析、时频分析结果的谐振峰值位置基本一致.
4 小结
本文研究了基于飞行遥测数据,使用环境激励模态辨识方法辨识系统的模态参数时,挑选真实模态的方法.首先,详细介绍了ARMA-NExT环境激励模态辨识方法的理论.接着,给出了模态指示因素,并详细分析了基于稳定图方法、频域和时频分析方法的真实模态筛选的方法.最后通过算例研究了飞行模态筛选的过程.研究发现,通过该方法得出结果与频域和时频分析结果基本一致.
通过研究,可以得出以下结论:
a)随着拟合阶次的升高,各阶模态分歧出现,稳定模态和非稳定模态逐渐清晰,非稳定模态频率较为散乱,与拟合阶次相关性较强,因此不是系统模态;
b)对比信号的功率谱密度曲线和时频分析结果,稳定模态的频率包含了前两者的谐振峰,但在功率谱密度曲线中的小鼓包也均被辨识成稳定模态频率;
c)在剔除大阻尼虚假模态后,最后通过对比稳定图、功率谱密度曲线和时频分析图,获得最终的真实模态,与功率谱密度分析、时频分析结果的谐振峰值位置基本一致.
通过本课题的研究,可以发现本文给出的飞行模态指示方法在筛选真实模态是有效的.
1李惠斌.大型工程结构模态参数识别技术.北京:北京理工大学出版社,2007 (LiHB.Modelparameteridentificationtechnologyoflargeengineeringstructures.Beijing:BeijingInstituteofTechnologyPress,2007(inChinese))
2傅志方,华宏星.模态分析理论与应用.上海:上海交通大学出版社,2000 (FuZhF,HuaHX.Theoryandapplicationofmodalanalysis.Shanghai:ShanghaiJiaoTongUniversityPress,2000 (inChinese))
3王宏禹,邱天爽,陈喆.非平稳随机信号分析与处理.北京:国防工业出版社,2008 (WangHY,QiuTS,ChenZ.Nonstationaryrandomsignalanalysisandprocessing.Beijing:NationalDefenseIndustryPress,2008 (inChinese))
4PeetersB,DeRoeckG,etal.Stochasticsubspacetechniquesappliedtoparemeteridentificationofcivilengineeringstructures.In:ProceedingofNewAdvancesinModalSynthesisofLargeStructures:Nonlinear,DampedandNondeterministicCases,1995,151~162
5IbrahimSR.Efficientrandomdecrementcomputationforidentificationofambientresponses.In:Proceedingof19thIMAC,Florida,USA,February5-8,2001:1~6
6AbdelghamM,GoursatM,etal.On-Linemodalmonitoringofaircraftstructuresunderunknowexcitation. Mechanical Systems and Signal Processing, 1999,13(6):839~853
7DeRoeckG,etal.BenchmarkStudyonsystemidentificationthroughambientvibrationmeasurements.In: 18thIMAC,2000:1106~1112
8BrinckerR,etal.Modalidentificationfromambientresponsesusingfrequencydomaindecomposition.In: 18thIMAC,2000:625~630
9BonatoB,CeraavoloR,ADeStefano.Useofcross-time-frequencyestimatorsforstructuralidentificationinnon-stationaryconditionsandunderunknowmexcitation. Journal of Sound and Vibration, 2000,237(5):775~791
10李晰,张德义,闫维明等.基于环境激励的钢管混凝土拱桥工作模态识别及修正.工程力学,2013,30(9):81~88 (LIX,ZhangDY,YanWM,etal.OperationalmodelidentificationandcalibrationofCFSTarchbridgebasedonambientexcitation. Engineering Mechanics, 2013,30(9):81~88 (inChinese))
11方勃,唐冶,杨飞虎等.火箭结构系统纵向模态自动辨识方法.动力学与控制学报,2014,12(3):269~273 (FangB,TangY,YangFH,etal.Anautomaticidentificationmethodforlongitudianalmodesofstructuralsystemofrocket. Journal of Dynamics and Control, 2014,12(3):269~273 (inChinese))
*TheprojectsupportedbyKeyLaboratoryOpeningTopicFundSubsidization(MCMS-0115G01)
†CorrespondingauthorE-mail:wangliang@nuaa.edu.cn
21September2014,revised23June2015.
STUDYONTHEINDICATIONOFTHEAIRCRAFTOPERATIONALMODEBASEDONARMA-NEXTANDSTABILIZATIONDIAGRAM†
WangLiang†ZhangYanZhouXiaoliShangLinZhuChenCaiYipeng
(China Academy of Launch Vehicle Technology, Beijing100076)
Basedonthetelemetrydata,thetechnologytoselecttherealmodesfortheaircraftoperationalmodederivedbyambientexcitationisinvestigatedthroughARMA-NExTmethodinthispaper.Firstly,thetheoryoftheARMA-NExTmethodisintroduced.Secondly,themodeindicationisproposed,andthefilterstrategyisstudiedbasedonstabilizationdiagram,frequencyandtime-frequencyanalysis.Eventually,acasestudyiscarriedout.Itisfoundthattheidentifiedmodesreasonablymatchwiththeresultofthefrequencyandtime-frequencyanalysis.
modeidentification,ARMA-NExT,operationalmode,stabilizationdiagram
E-mail:wangliang@nuaa.edu.cn
10.6052/1672-6553-2015-048
2014-09-21收到第1稿,2015-06-23收到修改稿.
*南京航空航天大学国家重点实验室2015年开放课题(MCMS-0115G01)
