一种基于动目标聚焦的SAR-GMTI方法
2016-10-14韦北余朱岱寅
韦北余 朱岱寅 吴 迪
一种基于动目标聚焦的SAR-GMTI方法
韦北余*朱岱寅 吴 迪
(南京航空航天大学电子信息工程学院 南京 211106)
由于输入信杂噪比(Signal to Clutter Noise Ratio, SCNR)较低,杂波抑制后超高频(Ultra-High Frequency, UHF)波段合成孔径雷达(Synthetic Aperture Radar, SAR)图像中剩余静止目标杂波导致系统虚警概率较高。该文提出一种动目标筛选方法,能够判断恒虚警概率(Constant False Alarm Rate, CFAR)检测器检测到的目标是否为动目标。提出一种动目标原始数据恢复方法,能够从整幅SAR图像中恢复任意孤立点的多普勒相位历史。采用距离多普勒处理对恢复的数据成像,然后采用方位自聚焦处理对所成子图像进行重新聚焦。如果子图像中目标为静止目标,则聚焦前后子图像不变,否则图像被重新聚集。通过检测图像的变化可以排除虚假动目标。仿真及实测数据处理结果说明了该方法的有效性。
合成孔径雷达;-K算法;地面动目标指示;超高频波段雷达
1 引言
合成孔径雷达(Synthetic Aperture Radar, SAR)被广泛安装在民用及军用飞行器上,地面动目标指示(Ground Moving Target Indication, GMTI)是SAR的一个重要的应用。现存的大多数多通道SAR GMTI系统都工作在X或C波段,但这两种波段雷达穿透植被的能力与超高频(Ultra-High Frequency, UHF)波段雷达相比较弱。由于UHF波段雷达波束宽度较宽,所以其成像相干积累时间较其他更高频段的雷达长,相干处理间隔(Coherent Processing Interval, CPI)更长,动目标在SAR图像中散焦更加严重,导致后续的恒虚警概率(Constant False Alarm Rate, CFAR)检测器的输入信杂噪比(Signal to Clutter Noise Ratio, SCNR)较低,杂波抑制后残留的静止目标导致虚警概率较高。所以UHF波段SAR检测动目标较其他更高频率的系统更困难。
由于动目标与静止目标回波信号的相位历史不同,动目标在SAR图像呈散焦状态。切向速度及径向加速度导致动目标距离单元徙动(Range Cell Migration, RCM)弯曲,同时导致动目标的方位向调频率与静止目标的不同[9,10],而且径向速度会引起额外的距离走动。由于回波数据被当做静止目标的回波进行处理,动目标与静止目标的方位向线性调频信号(Linear Frequency Modulation, LFM)失配,因此动目标在SAR图像中呈散焦状态,动目标响应的幅值通常比静止杂波的低,往往淹没在聚焦良好的背景杂波中。导致无法直接从SAR图像中检测动目标,需要先进行杂波抑制处理[8,11]。杂波抑制之后,静止杂波得到了抑制,而动目标的响应被保留了下来,但同时许多强散射静止点的响应也残留了下来。这些响应都能够被后续CFAR检测器检测到,很难将静止目标与动目标响应区分开来,因此找到一种能够筛选动目标的方法是一个具有现实意义的问题。但是可供参考的相关文献很少,现有的多数文献都只是围绕动目标成像及检测技术进行研究,没有解决区分静止及动目标的问题。为此本文提出了一种动目标筛选方法,能够判断CFAR检测器检测到的目标是否为动目标。
2 UHF波段多通道SAR GMTI 原理

图 1 多通道SAR GMTI原理框图
2.1 动目标多普勒相位历史恢复原理
图2是动目标多普勒相位历史恢复过程的示意图。首先将动目标从杂波抑制后的SAR图像中提取到子图像块中,然后扩展图像块,确保方位轴宽度大于动目标方位向信号的多普勒带宽,距离轴的宽度能够容纳下动目标距离徙动的距离弯曲,最后采用动目标原始数据恢复方法恢复动目标的多普勒相位历史。
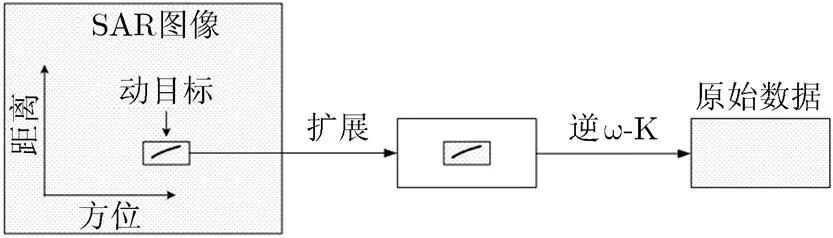
图 2 动目标多普勒相位历史恢复方法
2.2动目标聚焦原理
假设SAR工作在正侧视模式,则其几何模型如图3所示。图中,M为动目标;和分别表示动目标的径向速度和加速度;和分别是动目标切向速度和加速度;是雷达与目标之间的最短距离;为方位慢时间;为零时刻目标与载机间的距离;为动目标到坐标原点的连线与航迹法线方向的夹角。动目标与雷达的实时距离为,其值为
泰勒展开之后,其近似值为

图 3 斜距平面内动目标的数据采集几何模型
其中,线性项为径向速度所导致的,会引起动目标多普勒偏移,使动目标偏离真实位置。二次项与径向加速度及切向速度有关,会引起距离弯曲及方位向散焦。对于静止目标,此距离为
成像之前,首先以图像中心为参考点对恢复的数据进行运动补偿,参考函数为
其相位由参考点到目标的距离决定。
这距离正是RCM及散焦的原因。对于参考点,此距离为零,即参考点完全聚焦。对于参考点周围的静止点,其相对于参考点的距离是固定值。对于运动目标,其相对距离是随时间变化的。
三次项及更高次项被忽略。
对于静止目标,式(12)的参数为
由于提取的子图像对应的场景较小,其半径通常从几米到几十米,所以,即,这意味着参考点周围点的距离弯曲及方位向调频斜率与参考点的几乎相同,运动补偿之后,距离弯曲被近似补偿,方位向线性调频信号被压缩,只剩下了目标的距离及多普勒信息。由于存在线性的距离走动,RCM曲线跨越多个距离单元,为了解除距离频率及方位时间之间的耦合,需要进行Keystone变换,方位时间变换为
此式说明在距离多普勒域静止目标完全聚焦。
对于动目标,式(12)的参数为
假设提取的图像块包含一个动目标,且动目标位于图像的中心,运动产生的多普勒平移使动目标从真实位置沿方位平移到当前位置,因此动目标的多普勒频率与当前位置的多普勒频率相等,即等于或近似为零,即使其不为零,其引起的距离走动影响也会被后续的Keystone变换消除。由的表达式可见,动目标与静止目标的二次项大不相同,这是由切向速度及径向加速度所引起的。对于RCM,二次项会引起距离弯曲。对于方位聚焦,会引入二次相位误差(Quadratic Phase Error, QPE),导致目标在方位向展宽。从另一个角度来看,QPE是动目标与静止目标的方位向LFM信号失配所造成的。文献[13]提出了一种通过迭代估计运动参数来校正距离弯曲的方法,但此方法不适用于本文的情况,因为在成像完成之前不能确定动目标存在。对于不存在动目标的子图像,强行进行运动参数估计会引入人为的QPE,导致图像散焦。此外通过迭代的方法估计每个目标的运动参数会严重增加计算量。当距离弯曲满足式(18)的条件时可以忽略。
由于动目标聚焦的主要目的是确认动目标的存在性,粗聚焦足以确定其存在性,精确的动目标成像反而会增加计算量。不估计运动参数就无法校正距离弯曲,但通过自聚焦的方法仍然能够校正QPE。
综上所述,动目标聚焦的过程可以归结为一幅流程图,如图4所示。

图 4 动目标聚焦流程图
3 仿真及实测数据处理结果
3.1 仿真数据处理结果
通过仿真UHF波段SAR数据处理结果证明本文方法的有效性。雷达工作在正侧视模式,仿真参数与真实雷达系统参数相同,如表1所示。

表 1 UHF波段SAR系统参数
点目标布置如图5 所示,动目标的运动参数如表2所示。由于径向加速度对成像的影响与切向速度相同,所以动目标加速度设为零,为了充分验证本文方法的有效性,3个动目标的速度方向不同。

图 5 场景中目标分布图

表 2动目标运动参数

图 6 仿真数据-K算法处理结果
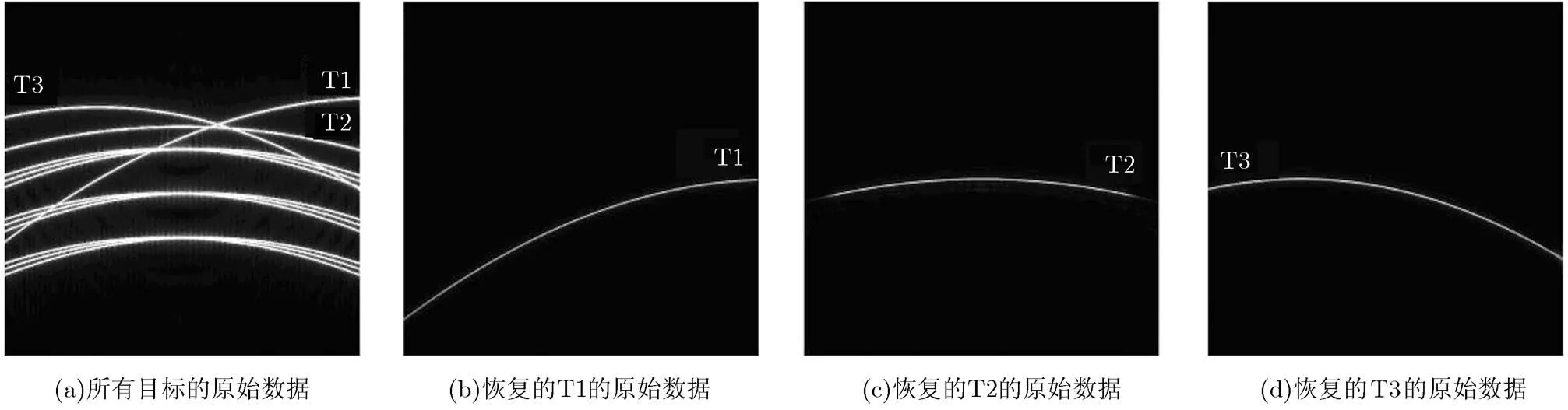
图 7 恢复的及原始的动目标数据
得到恢复的目标原始数据后可以进行成像处理,图8给出了静止目标T4 成像处理结果,成像参考点为T4的位置,从图中可以看出目标完全聚焦,由于成像参考点为T4自身,因此运动补偿之后其信号相位为零,因此后续的Keystone变换对其无效,变换后的结果与运动补偿后的相同,所以此处没有给出。
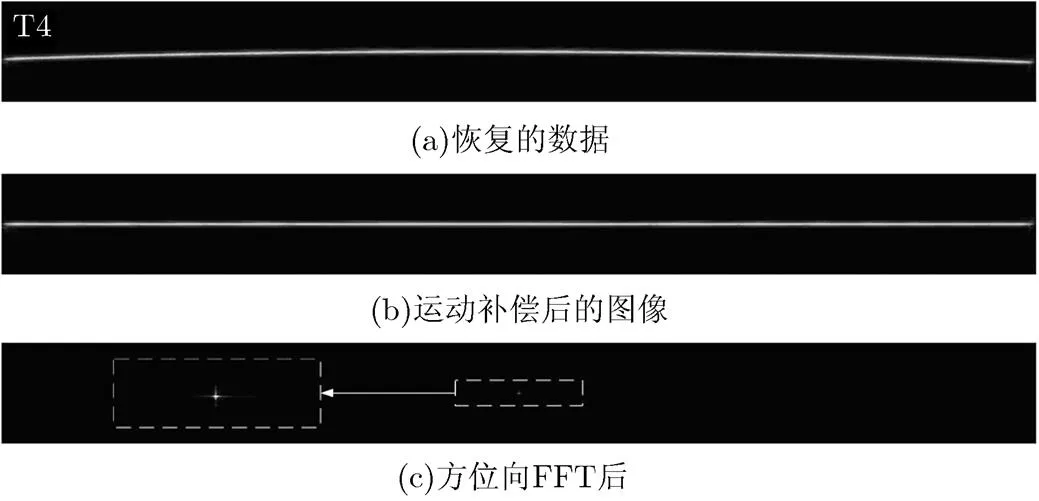
图 8 静止目标T4成像处理结果

图 9 T1成像处理结果
3.2 实测数据处理结果
本文实测数据为四通道UHF波段机载SAR数据。图10 给出了一个真实动目标的处理结果,结果与仿真结果相似。动目标的像跨越多个距离单元,如图10(a), 10 (b)所示,这主要是由动目标径向速度所导致的,图10(e)给出了运动补偿及方位向及方位向FFT处理之后的图像,从图中可以看出动目标几乎位于一个距离单元以内,图10(b)及图10(e)的变化说明距离走动已经被消除。方位向PGA后,目标聚为一点。这种聚焦前后明显的变化说明其的确为动目标,有许多方法可以检测这种明显的变化,比如计算图像的清晰度[9]。图 10(f)的清晰度是图 10(e)的7.68倍,但是并不是所有动目标都能够获得如此高的图像清晰度提升。散焦严重的动目标聚焦前的清晰度较低,聚焦后清晰度显著提升,其清晰度改善程度要好于散焦情况一般的动目标。

图 10 动目标的成像处理结果
为了比较动目标及静止目标的不同,对一个静止目标进行处理,其结果如图11所示。从图11(a)中可以看出此强散射点为建筑的房顶。杂波抑制之后仍然有很强的剩余杂波,很容易被CFAR检测器当做动目标检测到。与动目标的像相似,这个静止目标的像也跨越多个距离单元。如图11(e)所示,与图10(e)不同,运动补偿及方位FFT后目标的像仍然跨越多个距离单元,这说明此目标的确为静止目标。如图11(f)所示,方位向PGA后图像无明显变化,图11(f)的清晰度是图11(e)的1.22倍,这比动目标清晰度改善程度要低很多,进一步说明其为静止目标。
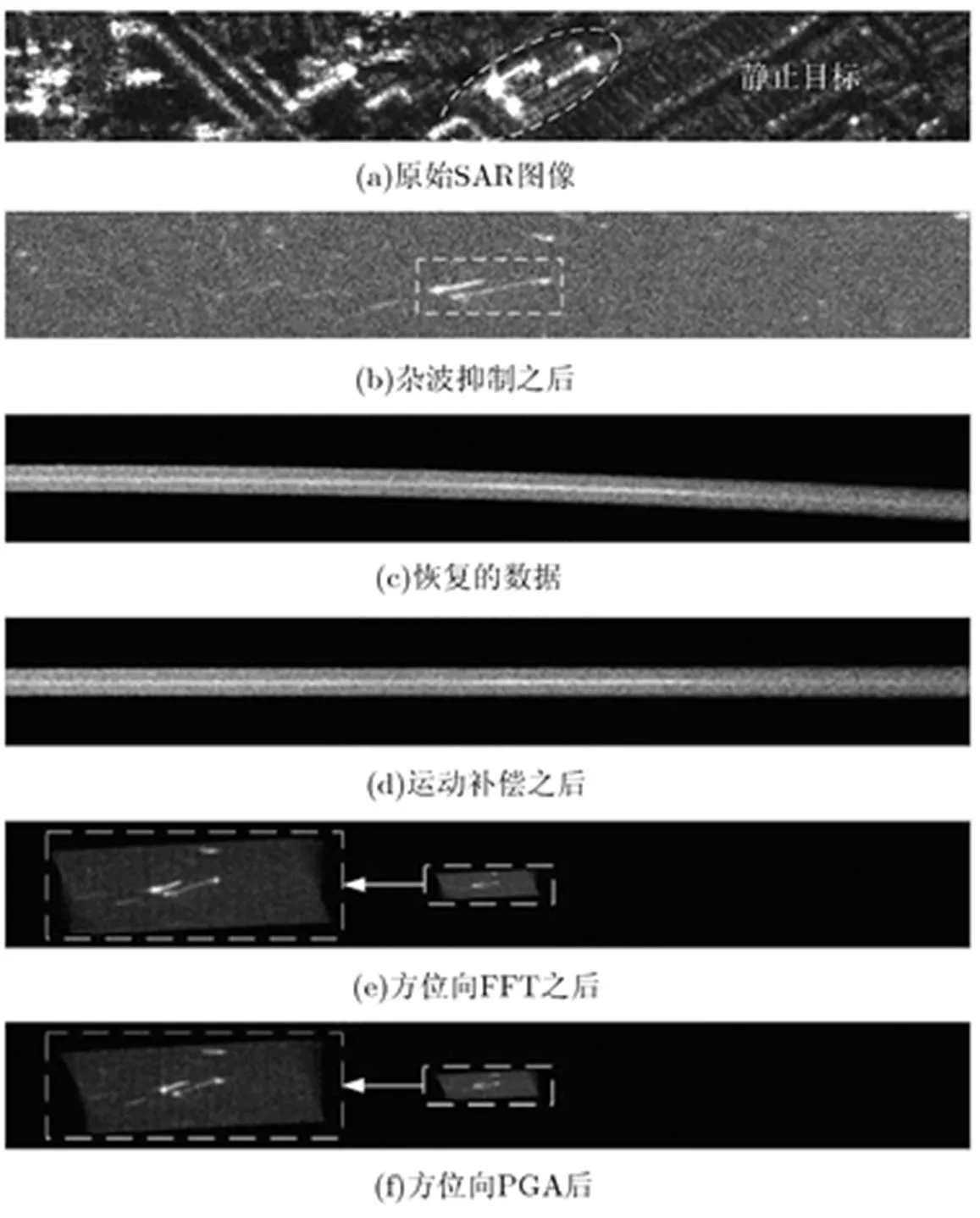
图 11 静止目标的成像处理结果
4 结束语
本文提出了一种从检测到的目标中筛选动目标的方法,此方法能够判断被CFAR检测器检测到的目标是否为真实动目标。针对子块SAR图像给出了动目原始数据恢复方法,能够从杂波抑制后的SAR图像中恢复目标的原始数据。对恢复的数据进行成像处理,方位向进行自聚焦处理,如果目标为动目标,则图像能够重新聚焦,聚焦处理前后图像变化明显,通过检测这种变化能够判断动目标的存在性。这种方法的优点是通过简单的运动补偿能够将动目标的距离走动去除,且由于采用小块的子图像处理方法,所以计算量很小,符合现代数字处理器并行处理的特点。此方法对于用其他算法所成SAR图像同样适用,只要知道原始SAR成像所用的算法,就可以进行相应的逆处理。仿真及实测数据处理结果说明了本文方法的有效性。
[1] ENTZMINGER JR J N, FOWLER C A, and KENNEALLY W J. JointSTARS and GMTI: Past, present and future[J]., 1999, 35(2): 748-761.
[2] 黄大荣, 孙光才, 吴玉峰等三通道TOPSAR-GMTI技术研究[J]. 电子与信息学报, 2013, 35(1): 41-48. doi: 10.3724/sp.j.1146.2012.00764.
HUANG D R, SUN G C, WU Y F,Research on three-channel TOPSAR-GMTI technology[J].&, 2013, 35(1): 41-48. doi: 10.3724/sp.j.1146.2012.00764.
[3] MAKHOUL E, BROQUETAS A, RUIZ Rodon J,A performance evaluation of SAR-GMTI missions for maritime applications[J]., 2015, 53(5): 2496-2509.
[4] 张佳佳, 周芳, 孙光才, 等. 基于前向阵雷达的三通道地面快速动目标检测与成像方法[J]. 电子与信息学报, 2013, 35(1): 8-14. doi: 10.3724/sp.j.1146.2012.00749.
ZHANG J J, ZHOU F, SUN G C,Approach for ground fast-moving target detection and imaging based on the three-channel forward-looking radar[J].&, 2013, 35(1): 8-14. doi: 10.3724/sp.j.1146.2012.00749.
[5] 田斌, 朱岱寅, 吴迪, 等. 稳健的多通道SAR/GMTI通道盲均衡算法[J]. 电子学报, 2014, 42(3): 424-431. doi: 10.3969/j.issn.0372-2112.2014.03.002.
TIAN B, ZHU D Y, WU D,Robust channel blind equalization algorithm for multi-channel SAR/GMTI system[J]., 2014, 42(3): 424-431. doi: 10.3969/j.issn.0372-2112.2014.03.002.
[6] MERTENS M, KOCH W, and KIRUBARAJAN T. Exploiting Doppler blind zone information for ground moving target tracking with bistatic airborne radar[J]., 2014, 50(1): 130-148.
[7] 刘安娜, 陈力, 赵斐, 等. 基于DPCA-FrFT的三通道SAR-GMTI方法[J]. 电子学报, 2011, 39(9): 2091-2097. doi: 10.3969/j.issn.0372-2112.2011.09.2091.07.
LIU A N, CHEN L, ZHAO F,. Study on DPCA-FrFT based multi-channel SAR-GMTI [J]., 2011, 39(9): 2091-2097. doi: 10.3969/j.issn.0372-2112. 2011.09.2091.07.
[8] SJOGREN T K, VIET Thuy V, PETTERSSON M I,Suppression of clutter in multichannel SAR GMTI[J]., 2014, 52(7): 4005-4013.
[9] FIENUP J R. Detecting moving targets in SAR imagery by focusing[J]., 2001, 37(3): 794-809.
[10] RANEY R K. Synthetic aperture imaging radar and moving targets[J]., 1971, (3): 499-505.
[11] SUCHANDT S, RUNGE H, BREIT H,Automatic extraction of traffic flows using TerraSAR-X along-track interferometry[J]., 2010, 48(2): 807-819.
[12] CUMMING I G and WONG F H. Digital Processing of Synthetic Aperture Radar Data Algorithms and Implementation[M]. Boston London: Artech House, 2005: 324-390.
[13] PERRY R P, DIPIETRO R C, and FANTE R L. SAR imaging of moving targets[J]., 1999, 35(1): 188-200.
[14] ENDER J H G. The airborne experimental multi-channel
SAR-system AER-II[C]. EUSAR, Konigswinter, Germany, 1996: 49-52.
[15] ZHU S, LIAO G, ZHOU Z,Robust moving targets detection and velocity estimation using multi-channel and multi-look SAR images[J]., 2010, 90(6): 2009-2019.
A SAR-GMTI Approach Based on Moving Target Focusing
WEI Beiyu ZHU Daiyin WU Di
(,,211106,)
Due to the low Signal to Clutter Noise Ratio (SCNR), the residual stationary targets in a clutter suppressed multichannel Ultra-High Frequency (UHF) band Synthetic Aperture Radar (SAR) image may lead to an unacceptable false alarm rate. A method of moving target screening is presented in this paper, which can determine whether the target detected by the Constant False Alarm Rate (CFAR) detector is a real moving one. A moving target data recovery method is described, which can recover the Doppler phase history of any isolated target within a full-K SAR image. The recovered data is processed again into a sub-image by range Doppler processing, and the sub-image is refocused with azimuth autofocus processing. The sub-image will not change after refocusing if the target in it is a stationary one, and it will be refocused if the target is a moving one. The false moving target can be eliminated by detecting this change. The proposed method is demonstrated on simulated and real SAR Ground Moving Target Indication (GMTI) data.
Synthetic Aperture Radar (SAR);-K algorithm; Ground Moving Target Indication (GMTI); Ultra- High Frequency (UHF) band radar
TN958.2
A
1009-5896(2016)07-1738-07
10.11999/JEIT151036
2015-09-14;改回日期:2016-02-19;网络出版:2016-04-07
韦北余 weibyboy@126.com[1]
国家自然科学基金(61301212),国防基础科研计划(B2520110008),航空科学基金(20132052030),中国博士后科学基金(2012M511750),南京航空航天大学基本科研业务费(NS2013023), 江苏高校优势学科建设工程
The National Natural Science Foundation of China (61301212), Defense Industrial Technology Development Program (B2520110008), Aeronautical Science Foundation of China (20132052030), China Postdoctoral Science Foundation (2012M511750), NUAA Fundamental Research Funds (NS2013023), Priority Academic Program Development of Jiangsu Higher Education Institutions
韦北余: 男,1988年生,博士,研究方向为合成孔径雷达地面动目标检测技术.
朱岱寅: 男,1974年生,教授,博士生导师,研究方向为合成孔径雷达信号处理.
吴 迪: 男,1982年生,讲师,研究方向为雷达信号处理和地面动目标检测.
