基于多普勒频率变化率机载单站的改进IMM跟踪算法
2016-10-14李洪斌高宪军
李洪斌,高宪军
(1.空军航空大学研究生队,吉林长春130022;2.空军航空大学科研部,吉林长春130022)
基于多普勒频率变化率机载单站的改进IMM跟踪算法
李洪斌1,高宪军2
(1.空军航空大学研究生队,吉林长春130022;2.空军航空大学科研部,吉林长春130022)
本文基于机载无源定位中机动目标跟踪的速度慢,精度低等问题,采用多普勒频率变化率作为基本定位方法,在充分研究KF、UKF、GAPF 3种滤波算法的基础上,提出了一种改进的交互式多模型算法(IMMKF-UKF-GPFA),该算法巧妙了分解了复杂的运动形式,融合了KF、UKF、GPFA 3种算法的优点。通过仿真实验,结果表明改进的交互式多模型算法(IMMKF-UKF-GPFA),不仅提高了跟踪精度,还减少了运算量,具有十分重要的实际意义。
无源定位;多普勒频率变化率;交互式多模型;粒子滤波
在现代高科技战争中,随着电子对抗技术和导弹技术的不断发展,无源定位系统凭借其设备简单,传输距离远,隐蔽性能好,适用范围广泛和生存能力强等优势,备受国内外军事强国的关注,无源定位对于提高导弹武器系统在电子战环境下得生存能力和作战能力具有重要作用,机载单站无源定位技术是近些年来无源定位研究的重点项目之一,其设备所占空间小,系统机动性强,作战范围灵活,关键时刻可以直接对目标进行摧毁打击,先发制人,故本文对机载模型的目标跟踪展开深入研究[1-4]。
现实的侦察作战跟踪定位中,目标辐射源的运动形式是时时刻刻发生变化的,且变化是我们不可知的,其随时可能发生爬高、转弯、闪避或其他姿势,单一的运动模型如匀速模型等已经不能准确地描述其运动形式,若状态方程与实际的运动状态偏差很大,则会导致目标丢失,跟踪失败。为了满足实际侦察作战中跟踪滤波的要求,对复杂机动目标的研究势在必行。
在二维平面下,本文采用多普勒频率变化率作为基本定位方法,对IMM-UKF[5-6]和IMM-PF[7-8]两种滤波算法的优缺点进行研究。针对以上两点算法的优缺点,提出了一种改进的交互式多模型算法(IMMKF-UKF-GPFA),该算法巧妙了分解了复杂的运动形式,提高了跟踪精度和实时性,具有十分重要的实际意义。
1 二维平面的多普勒频率变化率无源定位技术
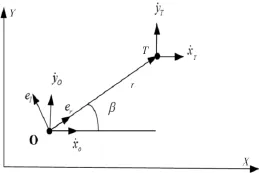
图1 二维平面观测平台与目标辐射源的几何示意图
在这里,假定目标辐射源与观测平台之间的距离远大于它们的自身尺寸,二者在二维平面内,位置关系如图1所示,观测平台在(xo,yo)处作直线运动,速度为目标辐射源在(xT,yT)处作直线运动,速度为两者之间的相对位置(x,y)=(xT-xO,yT-yO)。
根据质点运动原理,观测站和目标辐射源之间的距离可以表示为:

根据运动学中的向心加速度原理,vl(t)与r(t)存在以下关系:



当辐射源的载频固定时,多普勒频移fd和及其变化率包含了它们径向运动的信息:

式中:λ=c/f,是目标辐射源信号的波长。

上式即为无源测距的表达式,最终,辅以角度信息得出目标辐射源的具体位置:

2 改进的IMM算法
本文在详细研究MM-PF、IMM-UKF、IMM-KF算法的基础上,融合遗传智能算法,提出了一种改进交互式多模型算法(IMMKF-UKF-GPFA算法),它的主体思路是:将目标辐射源的跟踪问题依据线性程度分为3类:第一类是线性化模型,我们采用KF滤波器进行模型滤波;第二类是三阶以下(包括三阶)非线性高斯模型,我们采用UKF滤波器进行模型滤波;其余的高非线性高斯模型以及非高斯模型,我们GPFA滤波器进行模型滤波,尽可能的发挥出它们的优势,不仅能够提高滤波的精度问题,而且在还可以提高系统的实时性。
第一步:输入交互
已知给定的模型集转移概率pij,模型概率为有如下交互运算:
输入状态:

输入状态的协方差:
第二步:进行模型滤波
在第一步的基础上,分别通过三种滤波器模型的滤波得出状态估计量和协方差估计量具体过程与常规算法类似,遗传算法改进的重采样算法具体参照第四章,这里不再赘述。
第三步:模型概率更新
首先,从模型1到M2有似然函数表示为:

然后,模型M2到M有似然函数表示为:

最后,各模型概率更新如下:

式中:进行归一化

步骤4:输出交互

3 仿真验证
3.1仿真条件
假设测量观察间隔为T=1 s,波达角、波达角变化率和频率变化率的测量精度分别取:5×10-3rad、0.2×10-3rad/s、1 Hz/s。目标辐射源的初始状态矢量,取X(0)=[8 000,50,7 000,60]T,其初始状态协方差为P=diag(1,1,1,1),粒子滤波时模型的粒子数为N=800,融合遗传算法的改进粒子滤波模型粒子数为N=200,杂交率:0.7,突变率:0.01,蒙特卡罗仿真次数为100。
将各模型初始概率均设为1/3,模型转移概率矩阵为设定如下:

定义位置估计均方根误差:

3.2仿真结果
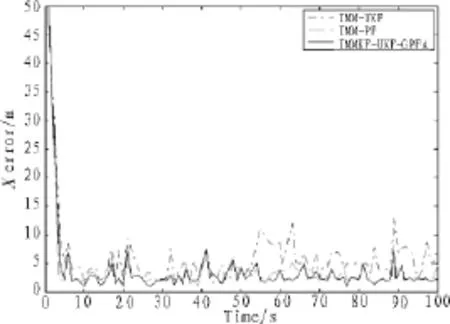
图2 X方向的均方误差对比
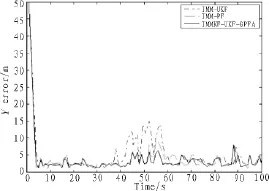
图3 Y方向的均方误差对比
运行时间(秒)

通过以上仿真结果,改进的交互式多模型IMMKF-UKFGPFA算法,线性滤波匹配KF,非线性程度低匹配UKF,在保证跟踪精度的同时又减少了计算量,用遗传算法改进的粒子滤波算法GFPA匹配非线性程度高和非高斯的机动模型,能在粒子数较少的情况下达到较高定位精度,同样节省了计算量。所以,该算法具有更好的实时跟踪性能。
4 结论
在现实的侦察作战跟踪定位中,目标辐射源的运动形式是时时刻刻发生变化的,且变化是我们不可知的,单一模型的滤波不能够满足实际定位的要求,多模型滤波也往往受到实时性的限制,相比之下,改进的交互式多模型算法IMMKFUKF-GPFA有明显的优势,更加贴近机载无源定位目标跟踪的要求,对实际跟踪定位具有十分重要的理论意义。
[1]杨一鸣.无源定位技术综述[J].科技风,2014(7):71-73.
[2]郭跃.导航与定位[M].北京:国防工业出版社,2008.
[3]赵国伟.高精度机载单站无源定位技术研究[D].西安:西北工业大学,2010.
[4]Bizup D F,Brown D E.The over-extended Kalman filter[C]. Proc.of the 6th International Conference on Information Fusion,2003:40-46.
[5]黄耀光.基于空频域信息的单站无源定位跟踪算法研究[D].信息工程大学,2013.
[6]杨艳成.基于交互式多模型的机动目标算法研究[D].哈尔滨工程大学,2011.
[7]Jian Lan,Li X Rong,Mu ChunDi.Best model augmentation for variable-structure multiple-model estimation[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(3):2008-2025.
[8]刘望生,李亚安,崔琳.基于当前统计模型的机动目标自适应强跟踪算法[J].系统工程与电子技术,2011,33(9):1937-1940.
Based on the Doppler frequency change rate airborne single IMM tracking algorithm improvements
LI Hong-bin1,GAO Xian-jun2
(1.Graduate Student Team,Aviation University of Air Force,Changchun 130022,China;2.Department of Scientific Research,Aviation University of Air Force,Changchun 130022,China)
Based on solve the Airborne Passive Location maneuvering target tracking speed and accuracy problems,the paper use of Doppler frequency rate of change as the basic positioning methods,the strengths and weaknesses IMM-UKF and IMMPF two filtering algorithms are studied.Advantages and disadvantages of the above two algorithms,we propose a modified IMM(IMMKF-UKF-GPFA),the algorithm clever decomposition of complex forms of exercise,the integration of KF,UKF,GPFA three algorithms advantages.Simulation results show that the improved IMM(IMMKF-UKF-GPFA),not only to improve the tracking accuracy,but also reduces the amount of calculation has a very important practical significance.
passive location;Doppler frequency change rate;IMM algorithm;PF algorithm
TN953
A
1674-6236(2016)12-0081-03
2015-07-06稿件编号:201507054
李洪斌(1991—),男,吉林伊通人,硕士研究生。研究方向:无源定位。
