海洋平台浮托安装中横荡护舷限位和缓冲性能分析
2016-10-12刘利壮王树青潘沈浩
刘利壮,王树青,潘沈浩
(中国海洋大学 山东省海洋工程重点实验室,山东 青岛 266100)
海洋平台浮托安装中横荡护舷限位和缓冲性能分析
刘利壮,王树青,潘沈浩
(中国海洋大学 山东省海洋工程重点实验室,山东 青岛 266100)
浮托安装法,是相对于传统吊装法的一种新型海洋平台安装方法,具有起重能力大、作业周期短、安装费用低、适用范围广、操作安全方便等优点,解决了海上大型平台组块的安装问题。为了研究横荡护舷对浮托安装的影响,首先对海洋平台浮托安装中的护舷装置进行了介绍,然后针对某工程实例应用AQWA软件进行了数值模拟,并进行了模型验证。从时域方面对就位状态下的浮托模型进行了耦合动力分析,研究了横荡护舷参数对驳船运动和撞击力的影响规律。研究表明,横荡护舷可以有效地减小驳船运动和撞击力,其限位和缓冲作用与护舷尺寸及护舷刚度均有关。研究结果可为实际浮托安装工程提供重要的参考。
浮托安装;海洋平台;AQWA;横荡护舷;驳船运动;撞击力
Abstract: Float-over is a new offshore installation method compared with traditional lifting methods, with the advantages of large lifting capacity, short operation time, low installation cost, wide application, safe and convenient operation, etc. It solves the problem of installation of large offshore platform. In order to study the influence of the swaying fender on the float-over, the fender devices of float-over installation for offshore platform are first introduced. Then, a float-over installation numerical simulation is demonstrated using AQWA based on a practical engineering installation, and the model test results are used to verify the numerical results. The coupled dynamic analysis of float-over model is performed in the time domain under docking situation. Particular attention is paid to the impact of different swaying fenders parameters on the motion and impact force of barge. The results show that the swaying fender can reduce the motion and impact force of barge effectively, and its limitation and buffering performance are related to its size and stiffness. The research results can provide an important reference value for practical float-over projects.
Keywords: float-over; offshore platform; AQWA; swaying fender; barge motion; impact force
随着人类对油气资源需求的不断增加,海洋平台被广泛应用于海上油气的开采当中。各种类型的海洋平台正在朝着大型化、综合化的方向发展,单个平台上部组块的重量越来越大。由于传统吊装法受到起重能力、结构强度等因素的限制,不能完成大型上部组块的海上安装作业,于是海洋平台浮托安装法技术应运而生。
浮托安装法,是海洋平台的常用安装方法之一。建造完成的平台上部组块由驳船运载驶入大开口导管架,并抛锚系泊或利用动力定位系统进行定位,完成平台的海上安装作业。整个浮托安装过程可分为以下几个主要阶段:滑移装船、海上运输、系泊定位、进船阶段、荷载转移与退船阶段。浮托安装过程如图1所示[1]。
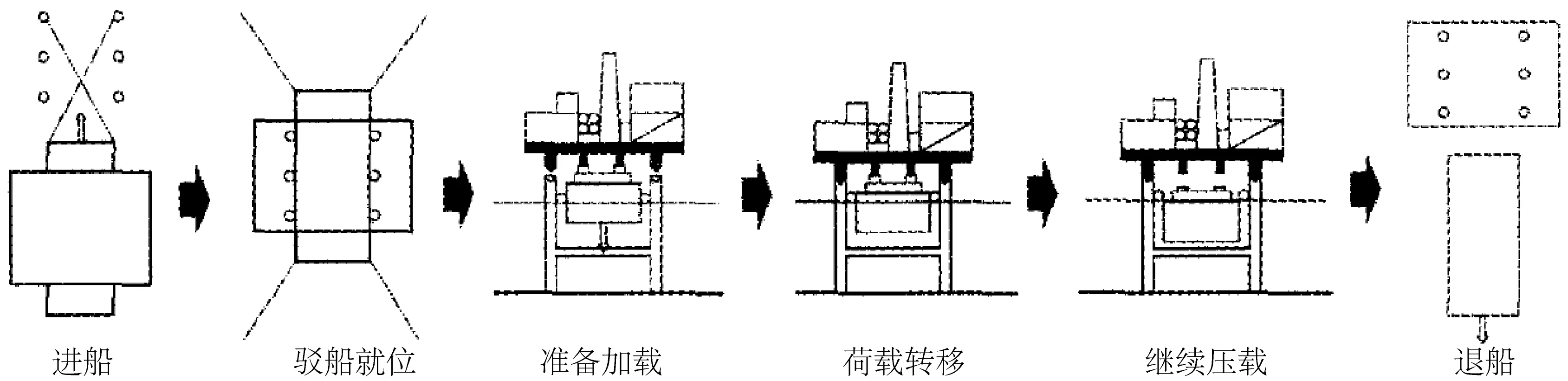
图1 浮托安装过程示意Fig. 1 Float-over process
随着浮托安装技术越来越广泛地应用到海洋平台安装中,国内外学者对浮托法做了大量研究。O'Neil等[2]全面描述了浮托法的发展史、现状和未来发展趋势。Gerner等[3]提出了一种新型浮托安装技术“ampelmann systems”,并进行了物理模型试验。Xia等[4]针对小型平台的浮托安装,研究了安装过程中驳船的纵荡、横荡和垂荡运动,并在数值模拟的基础上进行了物理模型试验,应用弹簧测定了驳船的撞击力。Choi等[5]研究了浮托安装过程中的关键装置,主要包括桩腿耦合装置(leg mating unit,简称LMU)和甲板支撑装置(deck supporting unit,简称DSU),对LMU和DSU进行了数值模拟,并在浮托安装对接阶段分析了其受力情况。Edslson等[6]应用MOSES软件分析了双体船在不同环境条件下的作业情况,研究了对接阶段上部组块与导管架之间的撞击力。
在国内,李达等[7]介绍了海洋平台浮托安装法在海上油气开采中的应用,详细描述了浮托安装法的总体设计思路,主要包括驳船的初步选择、环境条件评估、驳船能力评估以及浮托法的数值模拟。王树青等[8]系统地介绍了海洋平台浮托安装的步骤、关键缓冲设备以及关键技术,并利用SESAM软件进行了水动力分析。王文娟等[9]应用ANSYS-AQWA软件对浮托模型进行了数值模拟,重点研究了不同波浪工况下浮托模型的运动以及系泊张力的变化情况。许鑫等[10]应用SESAM软件从频域和时域两个方面对导管架平台的浮托安装进行了数值模拟研究,主要使用弹簧对LMU和DSU进行了模拟,计算了安装过程中LMU和DSU的受力,并通过模型试验验证了数值模拟的可靠性。
综合国内外研究现状来看,国外对浮托安装法的研究较为全面且深入,国内虽然应用浮托法安装海洋平台起步较晚,但经过近几年的发展也取得了一定的成果。在浮托安装技术的研究当中,对关键缓冲装置的研究成为了研究的热点问题之一。横荡护舷作为关键缓冲装置的一种,它的设计及选型对驳船的运动和碰撞均起到关键性的作用。这里针对某平台的浮托安装,利用AQWA软件建立了浮托数值模型,主要研究了护舷的尺寸和刚度对驳船运动和撞击力的影响规律。
1 护舷装置
在海洋平台浮托安装过程中,一般需要在驳船或导管架桩腿上安装专门设计的护舷装置,以防止驳船在海洋环境作用下与导管架发生剧烈碰撞,同时也有助于驳船定位,选取合理的护舷装置对浮托安装的安全作业和经济成本均具有一定的意义。护舷系统主要包括:船艉导向护舷、横荡护舷和纵荡护舷,如图2所示。
船艉导向护舷是使驳船能够顺利进入导管架的关键,有助于导管架桩腿有效地捕捉到驳船,并且引导驳船沿着护舷边缘进入导管架桩腿之间,该护舷能够有效保证驳船安全平稳地进入导管架,也对导管架桩腿起到缓冲保护的作用。
纵荡护舷也称为纵向定位器,在驳船到达就位状态时,纵荡护舷能够约束驳船的纵向位移,当纵荡护舷接触到导管架桩腿时,限制驳船继续前进,使得上部组块桩尖与LMU能够精准对接,主要起引导和定位的作用。

图2 护舷系统Fig. 2 Fender system
在浮托安装过程中驳船与导管架之间的横向间隙较小,很容易导致驳船与导管架之间发生碰撞,一般需要安装横荡护舷。横荡护舷可沿着船艉导向护舷延伸至纵荡护舷进行安装,也可以安装在导管架装腿上,用于限制驳船进退船、就位以及荷载转移过程中的横向位移,缓冲驳船舷侧与导管架桩腿之间的撞击力,从而起到保护驳船和导管架的作用。
设置不同参数的护舷装置,在浮托安装过程中会对驳船运动和撞击力产生一定的影响,下面主要对横荡护舷在海洋平台浮托安装中的限位和缓冲性能进行分析,研究护舷的尺寸、刚度等参数对驳船运动和撞击力的影响规律。
2 数值计算基础
2.1 三维势流理论
三维势流理论是计算浮体湿表面上波浪力最常用的方法。该理论假定流体为无旋运动的理想流体,速度势在流体域内满足拉普拉斯方程:2Φ(x,y,z,t)=0,同时满足边界条件:海底边界条件、自由表面边界条件、物面条件和辐射条件。
通常假设波浪的波幅相对于波长和水深都很小,可将非线性的边界条件进行线性化处理,根据线性叠加原理,速度势可分解为入射势ΦI、辐射势ΦR和绕射势ΦD,表达式如下:

(1)
采用Green函数以及边界元方法可求得总速度势,然后利用线性化的伯努利方程可求得物体表面的压强分布,再对物体表面的压强进行积分,便可得到作用在浮体结构物上的波浪力和力矩。
2.2 时域运动方程
在风浪流联合作用下,系泊结构的时域运动方程:
[M+μ()](t)+R(t-τ)(t)dτ+Kx=(t)+(t)+FWI(t)+FCU(t)+FF(t)+FM(t)
(2)
式中:M为浮体质量;μ()为浮体结构稳定时的附加质量,μ();(t)dτ为阻尼力,该卷积代表了由于浮体运动产生的波浪,其对结构物本身产生作用力的一种记忆效应,其中R(t)为延滞函数,R(t);K为静水回复刚度;为一阶波浪力和二阶波浪力,一阶波浪力可根据Cummins[11]提出的频域和时域的波浪力卷积关系进行计算,二阶波浪力可通过Pinkster近似法[12]求得;FWI(t),FCU(t)分别表示作用在结构物上的风力和流力,风力和流力通常是利用风力和流力系数求得;FF(t)为护舷反力,根据护舷受力-变形关系式求得;FM(t)为系泊力,在AQWA软件里系泊力的计算方法为:
Te=T0+Wz
其中,L表示锚链从浮体系泊点到海底锚固点的长度,T0表示海底锚固点处锚链的水平张力,W表示锚链单位长度的湿重,x表示锚链水平长度,z表示锚链垂直长度,Te表示浮体系泊点处锚链的张力。
3 数值模拟
3.1 计算模型
选取某生产平台的浮托安装实例为研究对象,该平台上部组块主结构由6根立柱和3层主甲板组成,主甲板尺寸为46 m×40 m×8 m(长×宽×高),上部组块安装重量约为4 000 t。平台的浮托安装驳船采用的是半潜式驳船,总长122.45 m,型宽30.5 m,型深7.6 m。驳船空载吃水1.5 m,排水量3 636 t;满载吃水为5.96 m,排水量18 420 t。为了保证驳船有足够的浮力和稳性,还要考虑到在退船阶段驳船要留有一定的干舷,一般要求最大吃水时驳船的最小干舷必须为1 m[13],以维持其水线面面积,选择在就位状态下驳船吃水为3.8 m。
该平台下部基础采用6腿直立式导管架结构,主导管架桩腿呈矩形布置,工作点处的平面尺寸为32 m×34 m,导管架在有横梁方向间距为32 m,沿开口方向间距为34 m,导管架立面图和平面图如图3所示。所用LMU顶端锥形接收器的捕捉半径r=0.6 m,由导管架、上部组块和驳船的基本资料可知,驳船舷侧与导管架桩腿之间的横向间距为0.757 m。

图3 导管架立面图和平面图Fig. 3 Elevation and plan view of jacket
本次浮托法系泊系统由8根直径为60 mm,质量为71.77 kg/m的锚链组成,锚链的破断强度为3 147 kN,图4为驳船就位状态下带有系泊系统的浮托安装数值模型。在分析中,为了更好地说明横荡护舷的限位和缓冲性能,需要对浮托模型关键部位进行监控和分析。上部组块关键点示意如图5所示,上部组块六个关键点分别代表上部组块六个桩尖。

图4 浮托数值模型Fig. 4 Float-over numerical model
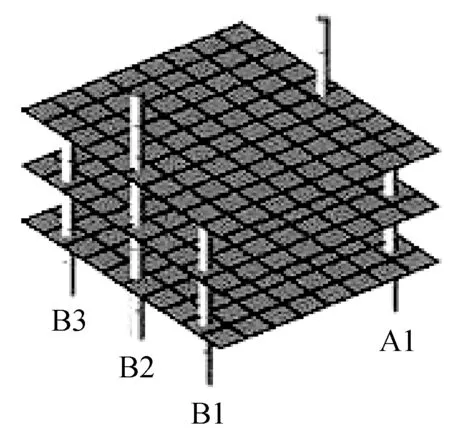
图5 关键点位置示意Fig. 5 The key point position
3.2 模型验证
根据相关文献[14],将数值模拟计算结果和相关物理试验结果进行了对比,主要对驳船舷侧与各导管架桩腿间的最大撞击力,以及上部组块桩尖垂向位移最大值进行了对比,如表1所示,数值模拟结果与物理实验结果相差不大,变化趋势基本一致,结果吻合良好。

表1 数值模型和物理实验的对比结果Tab. 1 The comparison between results of numerical simulation and physical experiment
3.3 计算工况
浮托安装数值模拟需要考虑各种环境工况,经计算发现,若选取较为缓和的工况,护舷的限位和缓冲作用不是很明显,对于护舷性能的研究意义不大。由于篇幅有限且为了保守起见,选取了1.5 m横浪(1.5 m波高,90°浪向)工况进行了分析,选取较为危险的环境工况,使得对于护舷参数的选取更加严格。波浪采用JONSWAP波谱,谱峰因子γ=3,谱峰周期Tp=6.4 s;平均流速为0.5 m/s,流向与浪向一致;1 h平均风速为10 m/s,风向与浪向一致;该平台所在海域水深12.2 m。
3.4 护舷设置
驳船就位状态下,驳船舷侧与导管架桩腿之间的横向间距较小,驳船与导管架不可避免地会发生横向碰撞,如果二者之间不安装横荡护舷,则会发生剧烈的刚性碰撞,容易造成驳船或导管架损坏。为了避免驳船与导管架之间发生较为剧烈的刚性碰撞,需要在驳船舷侧或导管架桩腿上安装护舷装置。
对于一个具体的工程项目,在选择完浮托驳船以后,驳船舷侧与导管架桩腿之间的横向距离是一定的,因此不同大小的护舷会使得驳船与导管架桩腿之间的横向间距有所不同,进而会影响驳船的运动和撞击力。主要选择了无护舷、窄护舷和宽护舷三种进船布置方式,如图6所示,重点对这三种方式下驳船的运动和撞击力情况进行了分析。

图6 三种布置方式Fig. 6 Three kinds of arrangement

图7 导管架桩腿受力变形曲线Fig. 7 Force deformation curve of the jacket legs
利用AQWA软件进行浮托安装的数值模拟,如果两个结构之间不定义护舷时,AQWA软件默认一个结构对另外结构的运动没有影响。在这种情况下,即使一个结构的位移超过了它们之间的净距离,也无法直接测得它们之间的撞击力。为了测得不加横荡护舷时,驳船与导管架桩腿之间的刚性撞击力,根据AQWA软件的特点,首先在ANSYS软件中建立导管架模型,然后在导管架桩腿上逐级施加荷载,并计算得到各级荷载作用下导管架桩腿的位移变形,这样便可得到导管架桩腿的受力变形曲线[15],如图7所示。
然后对导管架桩腿受力-变形曲线进行多项式拟合,得到其受力-变形表达式:
式中:表达式系数相当于导管架桩腿的刚度K0,即K0=5.924 7×107N/m。
驳船舷侧与导管架桩腿(护舷)之间发生碰撞时,应用AQWA软件对可能发生接触的位置设置接触对,即把护舷设置在导管架桩腿上,把接触平面设置在对应的驳船舷侧位置,定义护舷大小、刚度、摩擦系数等参数。由于摩擦作用对驳船-上部组块运动幅值和撞击力大小的影响非常小,这里没有研究摩擦系数对护舷限位和缓冲性能的影响,并默认摩擦系数为一常数。
为了能够更好地测得驳船与导管架之间的刚性撞击力,将护舷中心设置在导管架桩腿中心,护舷直径设置为导管架桩腿的直径1.986 m,护舷刚度即设置为导管架桩腿的刚度K0,然后在驳船舷侧相应位置定义接触平面。
设置窄护舷和宽护舷时,驳船舷侧与导管架桩腿之间要留有一定的横向间隙,为了满足驳船能够顺利进入导管架又要避免较为剧烈的碰撞,将护舷安装在导管架桩腿上,宽护舷超出导管架桩腿的厚度为0.737 m,即此时驳船舷侧与宽护舷之间的横向间隙为0.02 m;窄护舷超出导管架桩腿的厚度为0.507 m,即此时驳船舷侧与窄护舷之间的横向间隙为0.25 m,设置了不同的护舷刚度,同样在驳船舷侧相应位置定义接触平面,研究了护舷刚度大小对窄护舷和宽护舷作用下驳船运动和撞击力影响。一般用于浮托安装的护舷为橡胶护舷,在研究中将橡胶护舷等效为一非线性弹簧,用于模拟横荡护舷的护舷受力变形关系式[16]:
式中:K为非线性关系式的线性刚度部分,ε为非线性系数,本研究中ε取作1.2,该关系式与《橡胶护舷设计选型手册》[17]中TD-C橡胶护舷的受力-变形关系一致。
若护舷刚度较小,护舷较容易变形,不能很好地限制驳船的横向位移;若护舷刚度较大,护舷受力较大,起不到减小驳船撞击力的作用。故所选护舷线性刚度的最大值不能超过导管架桩腿的刚度K0,所选护舷线性刚度K以及刚度比值R=K/K0,如表2所示。
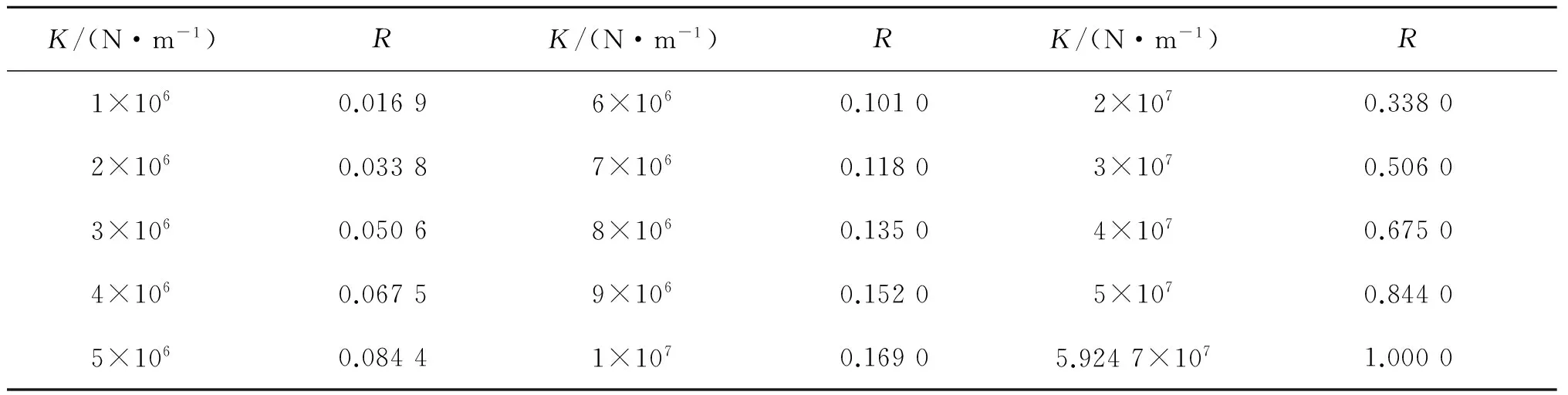
表2 所用护舷的线性刚度K以及刚度比值RTab. 2 Linear stiffness K and stiffness ratio R of fender
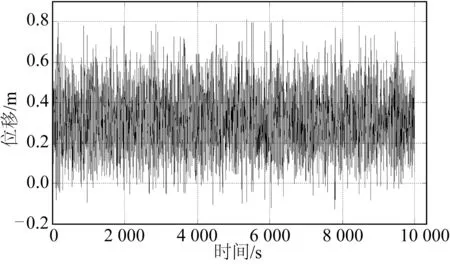
图8 无护舷时上部组块桩尖A1横向运动时程图Fig. 8 Horizontal motion time history of topside A1 without fender
4 结果分析
4.1 无横荡护舷时计算结果
横荡护舷主要有两方面的作用:一是能够限制驳船的横向位移,进一步减小上部组块桩尖的横向运动幅值,便于上部组块与LMU的对接;二是能够缓冲驳船舷侧与导管架桩腿之间的横向撞击力,从而起到保护驳船和导管架的作用。基于刚性碰撞模拟分析方法,首先分析了不加横荡护舷时,驳船的运动以及驳船与导管架桩腿之间的刚性撞击力。
为了使得上部组块和LMU能够更好地对接,要满足上部组块桩尖的横向最大偏移量不能超出LMU的捕捉范围,计算发现上部组块桩尖A1的横向运动幅值最大,这里仅给出了无护舷时上部组块桩尖A1的横向运动偏移时程图,如图8所示。图中桩尖A1横向运动有正值有负值,正值表示向驳船左侧偏移的距离,负值表示向驳船右侧偏移的距离。桩尖A1横向运动并不是在零值附近浮动,这是由于风、浪、流均为90°方向,在风力、流力以及二阶波浪力的作用下,使得桩尖A1偏离平衡位置在0.3 m左右浮动。由图8还可以看出上部组块桩尖A1横向运动幅值为0.814 m,超出了LMU的捕捉范围,这会导致桩尖与LMU发生碰撞,对LMU造成损坏,不利于上部组块与导管架的对接。
在1.5 m横浪条件下,驳船舷侧与导管架桩腿之间的横向最大撞击力为4 996.8 kN,发生在导管架桩腿A1位置处,刚性撞击力较大,可能会导致驳船或导管架发生损坏,不利于浮托安装的顺利进行。
4.2 护舷限位性能分析
为了对横荡护舷的限位性能进行分析,基于表1,对窄护舷和宽护舷作用时,均设置了一系列不同的护舷刚度,主要分析了各护舷刚度下桩尖的横向运动,并对运动幅值进行了无量纲化处理。
式中:Yn-max、Yb-max分别为窄护舷和宽护舷作用时,上部组块桩尖的横向运动幅值;r为LMU顶端锥形接收器的接收半径,r=0.6 m。

图9 桩尖横向运动比值与护舷刚度比值的关系曲线Fig. 9 Horizontal motion ratio and fender stiffness ratio curve
图9给出了窄护舷和宽护舷作用时,上部组块桩尖横向运动幅值相对LMU接收半径的比值与护舷刚度比值的关系。当Mn、Mb>1时,说明上部组块桩尖横向运动幅值超出了LMU的捕捉范围,此时安装横荡护舷不能达到限位的效果。当Mn、Mb<1时,说明上部组块桩尖横向运动幅值小于LMU的捕捉半径,此时安装横荡护舷可以达到限位的效果。
由图9可以看出:
1) 窄护舷和宽护舷作用时,上部组块桩尖横向运动幅值随护舷刚度的变化趋势一致,均随护舷刚度的增大先减小再趋于某一稳定值。对于窄护舷来说,当护舷刚度比值R>0.844时,桩尖横向运动幅值基本不再变化,约为LMU接收半径的0.68倍;对于宽护舷来说,当R>0.5时,桩尖横向运动幅值减小到某一稳定值,约为LMU接收半径的0.42倍。
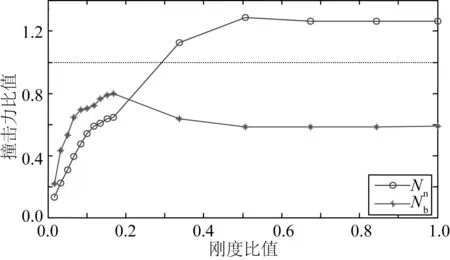
2)与不加横荡护舷装置相比,窄护舷和宽护舷均能起到限制驳船横向运动的作用。对于窄护舷来说,当护舷刚度比值0.107 3)在所选护舷刚度比值的整个范围内,均有Mn>Mb,即宽护舷作用时上部组块桩尖横向运动幅值相对较小,说明护舷尺寸对横荡护舷的限位作用有一定影响。护舷刚度较小(0.016 9 为了研究横荡护舷的缓冲性能,基于表1,对窄护舷和宽护舷作用时,均设置了一系列不同的护舷刚度,主要计算和分析了驳船与导管架桩腿之间的撞击力,并对最大撞击力进行了无量纲化处理: 式中:F0-max,Fn-max,Fb-max分别为无护舷时、窄护舷作用时和宽护舷作用时,驳船舷侧与导管架桩腿之间的最大撞击力。 图10 撞击力比值与护舷刚度比值的关系曲线Fig. 10 Impact force ratio and fender stiffness ratio curve 图10给出了有、无横荡护舷时,驳船舷侧与导管架桩腿之间最大撞击力的比值与护舷刚度比值的关系。当Nn>1时,说明此时驳船与导管架桩腿之间的撞击力大于无护舷时的撞击力,安装横荡护舷装置达不到缓冲的效果。当Nn、Nb<1时,说明此时驳船与导管架桩腿之间的撞击力小于无护舷时的撞击力,安装横荡护舷装置能够降低驳船撞击力,可以达到缓冲的效果。 根据图10可以得出以下结论: 1)窄护舷和宽护舷作用时,驳船最大撞击力随护舷刚度的变化趋势一致,随护舷刚度的增大先增大再减小而后趋于某一稳定值,宽护舷作用时变化趋势更为明显。 2)窄护舷作用时,当护舷刚度比值0.016 9 3)宽护舷作用时,护舷刚度比值R在所研究的整个范围内均有Nb<1,说明宽护舷能够有效地降低驳船撞击力;当R在0.169左右时,驳船撞击力达到了最大值,约为不加护舷时的0.8倍;当0.5 4)护舷刚度较小(0.016 9 5)护舷刚度较大(0.209 这是因为与宽护舷相比,窄护舷不能很好地限制驳船的横向运动,若使用刚度较大的护舷,驳船舷侧的横向运动幅值仍然较大,导致窄护舷的变形较大,已经超过了无护舷时导管架的变形,使得窄护舷产生了较大的护舷反力,甚至超过了无护舷时的受力;对于宽护舷来说,护舷刚度较大时,可以更好地限制驳船的横向位移(由图9可以看出),此时宽护舷的变形量大大减小,使得撞击力减小。 综上所述,从横荡护舷限位和缓冲两方面综合分析,可以进一步给出:对于窄护舷来说,护舷刚度比值0.107 通过对某一平台的浮托安装进行数值模拟分析,研究了护舷参数对横荡护舷限位和缓冲性能的影响规律,其中主要考虑了护舷的尺寸和刚度。可以得到以下结论: 1)安装横荡护舷装置可以有效的减小上部组块桩尖横向运动和驳船撞击力,有利于浮托安装的顺利进行。 2)为了使得横荡护舷限位和缓冲性能均能达到较好的效果,在使用窄护舷时,适合选用刚度相对较小的护舷装置;在使用宽护舷时,适合选用刚度相对较大的护舷装置。 3)对于本工程实例适合选取护舷刚度比值0.5 因此在海洋平台浮托安装过程中,一般需要安装横荡护舷装置。在浮托安装选取横荡护舷装置时,应当通过选取合适的护舷参数,使得护舷的限位和缓冲作用均能达到最佳效果,本数值模拟分析可为工程实例提供新的设计思路,对实际浮托安装工程具有重要的参考意义。 [1] 张鼎,陈刚,杨建民,等. 荔湾3-1上部组块浮拖安装实测研究[J]. 海洋工程, 2014, 32(6): 31-40. (ZHANG Ding, CHEN Gang, YANG Jianmin, et al. Field measurement of Liwan 3-1 topside float-over installation[J]. The Ocean Engineering, 2014, 32(6):31-40. (in Chinese)) [2] O′NEIL L A, FAKAS E, RONALDS B F. History, trend and evolution of float-over deck installation in open waters[C]//Proceedings of the SPE Annual Technical Conference and Exhibition, SPE 63037. 2000. [3] GERNER F, TEMPEL J, ZOONTJES R, et al. Motion compensated float-over installation with the use of ampelmann systems [C]//Proceedings of the Offshore Technology Conference. 2007: OTC18640. [4] XIA J, HAYNE S, MACFARLANE G. Investigation into float-over installations of minimal platforms by hydrodynamic model testing[C]//Proceedings of the 24th International Conference on Offshore Mechanics and Arctic Engineering. 2005. [5] CHOI Y M, NAM B W, HONG S Y. Numerical modeling of load transfer unit of the float-over installation[C]//Proceedings of the Twenty Fourth International Ocean and Polar Engineering Conference. 2014. [6] EDELSON D, LUO M, HALKYARD J, et al. Kikeh development: Spar topside floatover installation[C]//Proceedings of the Offshore Technology Conference. 2008: OTC19639. [7] 李达,范模,易丛,等. 海洋平台组块浮托安装总体设计方法[J]. 海洋工程,2011,29(3):13-22. (LI Da, FAN Mo, YI Cong, et al. General design method on float-over installation of platform's topsides[J]. The Ocean Engineering,2011,29(3):13-22. (in Chinese)) [8] 王树青,陈晓惠,李淑一,等. 海洋平台浮托安装分析及其关键技术[J]. 中国海洋大学学报,2011,41(7):189-196. (WANG Shuqing, CHEN Xiaohui, LI Shuyi, et al. State of the art and some key techniques for offshore float-over installation[J]. Journal of Ocean University of China, 2011,41(7):189-196. (in Chinese)) [9] 王文娟,王树青,李思强. 海洋平台浮托安装的数值实验研究[J]. 中国海洋大学学报,2013,43(3):86-91. (WANG Wenjuan, WANG Shuqing, LI Siqiang. Numerical based AQWA simulation of float-over installation for offshore platform[J]. Journal of Ocean University of China, 2013,43(3):86-91. (in Chinese)) [10] 许鑫,杨建民,吕海宁. 导管架平台浮托法安装的数值模拟和模型试验[J]. 上海交通大学学报,2011, 45(4):439-445. (XU Xin, YANG Jianmin, LV Haining. Experimental and numerical analysis for float-over installation on jacket[J]. Journal of Shanghai Jiaotong University,2011, 45(4):439-445. (in Chinese)) [11] CUMMINS W E. The impulse response function and ship motions[M].Washington D C: Schiffstechnik,1962. [12] PINKSTER J A. Low frequency second order wave exciting forces on floating structure[D]. Delft: Delft University of Technology,1980. [13] Noble 0031, Guidelines for float-over installations[S]. Hamburg: GL Noble Denton,2010. [14] 陈晓惠. 海洋平台上部组块浮托安装数值模拟与实验研究[D]. 青岛:中国海洋大学, 2012. (CHEN Xiaohui. Numerical simulation and model test of float-over installation for large platform topsides[D]. Qingdao: Ocean University of China, 2012. (in Chinese)) [15] 中国海洋大学. 海洋平台浮托安装碰撞模拟分析方法: 中国,201310677429.X[P]. 2015.(Ocean University of China. Impact simulation analysis method of float-over installation for offshore platform: China, 201310677429. X[P], 2015. (in Chinese)) [16] 蒋致禹. 船舶护舷结构的碰撞研究[D]. 上海:上海交通大学, 2010. (JIANG Zhiyu. Study on the responses of ship fenders under impact load[D]. Shanghai: Shanghai Jiaotong University, 2010. (in Chinese)) [17] 中橡集团青岛天盾橡胶有限公司. 橡胶护舷设计选型手册[R]. 青岛:中橡集团青岛天盾橡胶有限公司,1999.(Qingdao Tiandun Rubber Co. Ltd. of China Rubber Group. Rubber fender design selection manual[R]. Qingdao: Qingdao Tiandun Rubber Co. Ltd. of China Rubber Group,1999. (in Chinese)) Limitation and buffering performance analysis of swaying fender in float-over installation for offshore platform LIU Lizhuang, WANG Shuqing, PAN Shenhao (Ocean University of China, Shandong Provincieal Key Laboratory of Ocean Engineering, Qingdao 266100, China) P751 A 10.16483/j.issn.1005-9865.2016.06.003 1005-9865(2016)06-0021-09 2015-10-20 山东省科技计划发展项目(2013GHY11503);泰山学者工程资助项目 刘利壮(1989-),男,山东济宁人,硕士研究生,从事海洋工程结构物水动力分析。E-mail: lz_liu0911@163.com 王树青(1975-),男,山东滨州人,教授,博士生导师,从事海洋工程结构物振动分析、健康检测、浮体/系泊耦合动力分析以及海洋平台浮托安装技术研究。E-mail: shuqing@ouc.edu.cn4.3 护舷缓冲性能分析
5 结 语
