基于知识重用的模块化快速重组方法
2016-09-27朱晓慧夏公川
黄 康, 陈 祥, 朱晓慧, 夏公川
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
基于知识重用的模块化快速重组方法
黄康,陈祥,朱晓慧,夏公川
(合肥工业大学 机械与汽车工程学院,安徽 合肥230009)
为了提高模块化重组的效率,文章提出了一种快速重组方法。该方法分析了能够描述模块化重组过程的知识组成、知识表达形式,从而构建知识库;利用知识库建立了模块匹配关系库、模块关系邻接矩阵以及模块匹配搜索算法,并进行重组定位;在模块知识库和匹配算法的基础上建立了接口约束向几何约束转化的流程。以某雷达典型结构的模块化重组为例,开发出快速重组系统,并验证了该方法的有效性。
知识重用;模块化重组;模块邻接矩阵;模块匹配搜索算法;约束转化
模块化设计通过对不同模块的组合实现了以有限资源生产出尽可能多的产品系列,是一种面向大批量定制和敏捷制造的柔性设计方法[1],同时也是企业快速响应市场的有效手段[2]。传统的模块化设计方法是依据功能-结构原理,把产品组成划分为功能结构不同的各个模块,然后把形成的各个模块按照一定顺序组装,形成一个特定的产品系列,所有的产品系列便构成了此模块化产品的产品族[3]。在实际设计过程中,一旦客户需求要求对现有的产品系列进行变动,设计者大多会按照一定的逻辑关系重复执行设计过程,产生大量重复性工作,大多数因效率太低导致无法及时满足客户需求。
为了解决这个问题,很多研究者针对模块化装配做了大量的研究工作。文献[4]提出了相似性、重用性、整体性的大批量定制基本原理,说明了模块化重组是一种柔性的设计方法;文献[5]以汽车为例研究了模块化装配与传统装配系统的不同点;文献[6]基于DSM矩阵提出了一种加快模块化装配效率的框架结构;文献[7]针对模块化装配过程中模块间的相似性与依赖性进行了描述;文献[8]基于模块化思想建立了产品的拆卸模型,通过生成产品的层次网络图介绍产品拆卸序列的生成过程,可以看作是模块化重组的逆过程;文献[9]对面向过程的产品装配建模进行了研究,通过装配关系识别来捕捉设计者的设计意图。
上述研究在一定程度上描述了模块化装配与传统装配的异同点以及实现的框架结构,但是关于构建模块间的关系以及在重组时快速搜索到匹配双方的研究较少,所以本文在文献[10-11]论述的知识管理在模块化设计中创新应用思想的基础上,提出了一种基于知识重用的模块化快速重组方法。
1 整体技术路线
基于知识重用实现模块化快速重组方法的整体技术路线如图1所示。
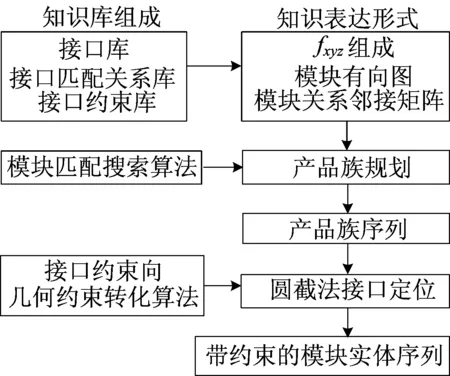
图1 基于知识重用的模块化快速重组整体技术路线
首先,对描述模块化重组特性的“接口”概念进行定义,并以一个典型的模块化产品结构实例来描述其接口组成。
其次,定义“模块有向图”概念及其表达形式;用fxyz描述一般模块化产品的组成及其相互关系,并探讨其相关性质。
然后,描述构成知识库组成的接口匹配关系库,并提出模块关系邻接矩阵的概念来定量化表示模块组成及其相互关系,继而提出模块匹配搜索算法,实现模块与模块之间的精确匹配。
在完成模块间的匹配后,便产生了特定的产品族序列。而要完成各模块的重组,还需要对序列中的各个模块之间实现从接口约束到几何约束的转化,并把几何约束施加在对应的实体上。
本文构建了上述实例的接口约束库,提出了圆截法接口定位的方法,实现了模块内特定实体各个接口的定位,并在此基础上提出接口约束向几何约束转化的流程,最终实现了几何约束的转化和施加,获得了带约束的模块实体序列。
2 模块化产品知识库的构建
2.1接口定义
接口是模块化产品中各模块与其他模块匹配的局部特征,在装配环境中表现为零件自身的装配属性[12]。
对于一个典型的模块化产品结构,定义接口的关键在于寻找准确描述模块间匹配关系的局部特征。一个模块化产品结构实例如图2所示,其中,接口包括圆孔、圆柱、方孔、方柱、三角孔和三角柱6种形式。
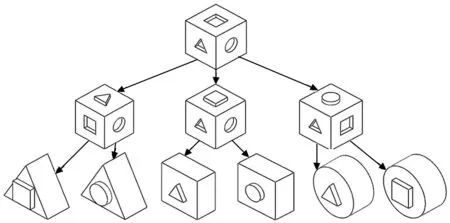
图2 模块化产品结构实例
2.2模块有向图定义
模块化产品系列的有向图如图3所示。
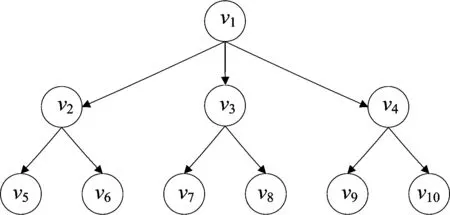
图3 模块有向图
有向图定义为:

(1)
其中,V={v1,v2,…,vn}为结点的非空有限集;E={〈vi,vj〉}为结点的有序对,表示结点间的关系,〈vi,vj〉称为弧,vi为弧尾,vj为弧头,注意〈vi,vj〉≠〈vj,vi〉。符合上述定义的图称为模块化产品系列的模块有向图。
2.3模块化产品fxyz组成及性质
对图3用数学模型fxyz来描述一般模块化产品的组成结构。其中,x为模块代号;y为实体代号;z为接口代号;fx为模块层;fx*y为特定模块层内的实体;fx*y*z为特定模块层内特定实体的接口;f为取数。
为了完整描述模块化产品的结构形式,结合模块有向图的定义及fxyz组成,定义2个描述有向图中结点性质的fxyz参量为:① itfx*y,特定模块层内实体的入度,有向图中为指向结点的弧数;② otfx*y,特定模块层内实体的出度,有向图中为指离结点的弧数。
根据模块化产品的一般特点,得到fxyz的3条性质如下:
(3) itfxminy=0,otfxmaxy=0。其含义是最小模块层实体的入度为0,最大模块层实体的出度为0。
图2模块有向图的f表示如图4所示。

图4 模块有向图的f表示
根据(1)式可得:
3 模块匹配
3.1模块匹配关系库
模块匹配关系库中存放的是模块与模块之间的接口匹配形式及其代号。图2中的6种接口可形成3种接口匹配形式,圆柱孔连接、方柱孔连接、三角柱孔连接的接口匹配代号分别为1、2、3。
模块与模块之间的接口匹配形式采用一种语义描述,其优点为:① 传统几何元素集成化,模块与模块之间匹配的不再是孤立的点线面,而是各类元素的集成,无需手工拾取,且更易于理解;② 每一种匹配形式均赋予区别于其他形式的代号,用代号来表征匹配形式既能够把抽象的匹配形式数字化,便于程序识别,同时根据模块化产品的不同可无限制地扩充,实现知识重用。
3.2模块关系邻接矩阵
模块关系邻接矩阵是用矩阵的形式来表征一个具体模块化产品系列的组成结构及其相互关系。
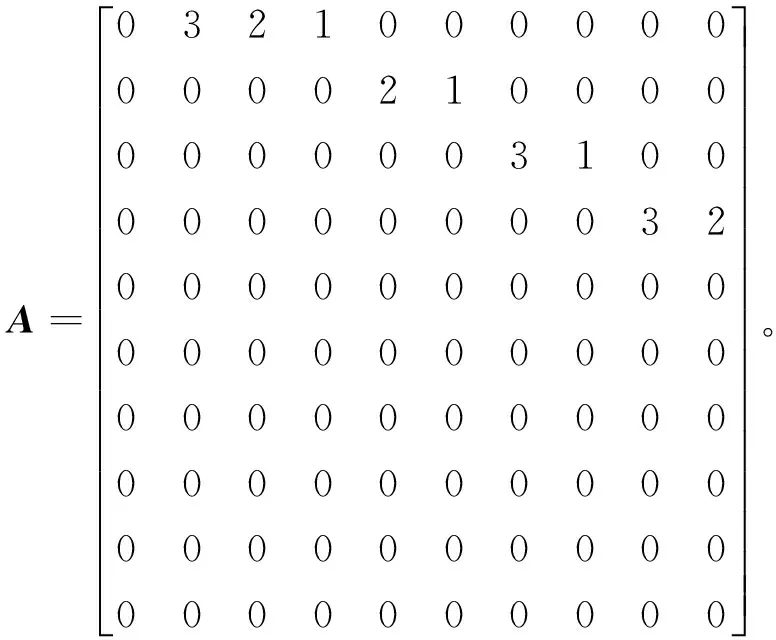
对于一个确定的模块化产品系列,采用(1)式对模块关系图G进行描述,若图G中有n个结点,则形成n×n的模块关系邻接矩阵。矩阵元素为Aij,若〈vi,vj〉是E中的弧,则Aij=wij,wij为上述3种接口匹配形式对应的接口匹配代号;反之则Aij=0。
对图2的模块化产品系列用模块有向图3表示后,其对应的模块关系邻接矩阵为10×10矩阵,即
3.3模块匹配搜索算法
制定模块匹配搜索算法的目的是当选定一个特定模块层的初始实体fx*y后,能够通过算法准确地匹配出与选定实体匹配的下一模块的某一实体f(x*+1)y。
模块匹配搜索算法如下:
(3) 搜索满足Aij=wij的j值,确定下一结点代号vj。

(6) 赋予i=j,更新弧尾vi,返回步骤(1)循环执行。
按照上述算法对图4的模块有向图进行模块匹配搜索。
首先,选定初始实体f11,赋予vi=f11;然后再选定初始接口为f113;形式为圆孔,则其接口匹配形式为圆柱孔连接,接口匹配代号为1,wij=1;在A矩阵第1行中搜索满足A1j=1的j值为4,下一结点代号为v4;根据模块有向图的f表示,v4对应f23,从而形成结点有序对〈v1,v4〉和实体有序对〈f11,f23〉;此次搜索得到j=4,根据实体有序对可知对应的模块层x=2,没有超过模块层的最大值xmax=3;把当前得到的结点有序对〈v1,v4〉中的弧头v4作为弧尾,并选定v4对应实体f23中的方孔作为初始接口,按照上述流程循环执行,最终得到v1→v4→v10的结点有序列,以及对应的f11→f23→f36的实体有序列。
最终得到的实体有序列f11→f23→f36中所包含的实体组成成分f11、f23、f36以及包含的实体有序对〈f11,f23〉、〈f23,f36〉均可以在模块有向图f表示中的V(G)和E(G)中找到,由此验证了此模块匹配搜索算法的正确性。
4 接口约束向几何约束的转化
4.1接口约束库
由于接口是实体的某一局部特征,或者是某些几何元素的集合,因此接口约束必然不同于传统的几何约束,从本质上来看,接口约束是若干相互关联的几何约束集,是一种形式化的语义描述。依据接口定义,图2中模块化产品系列模型的接口约束库组成见表1所列。
由图4可知,整个模块化产品系列共有9个接口约束,依照表1得到其接口约束组成,见表2所列。
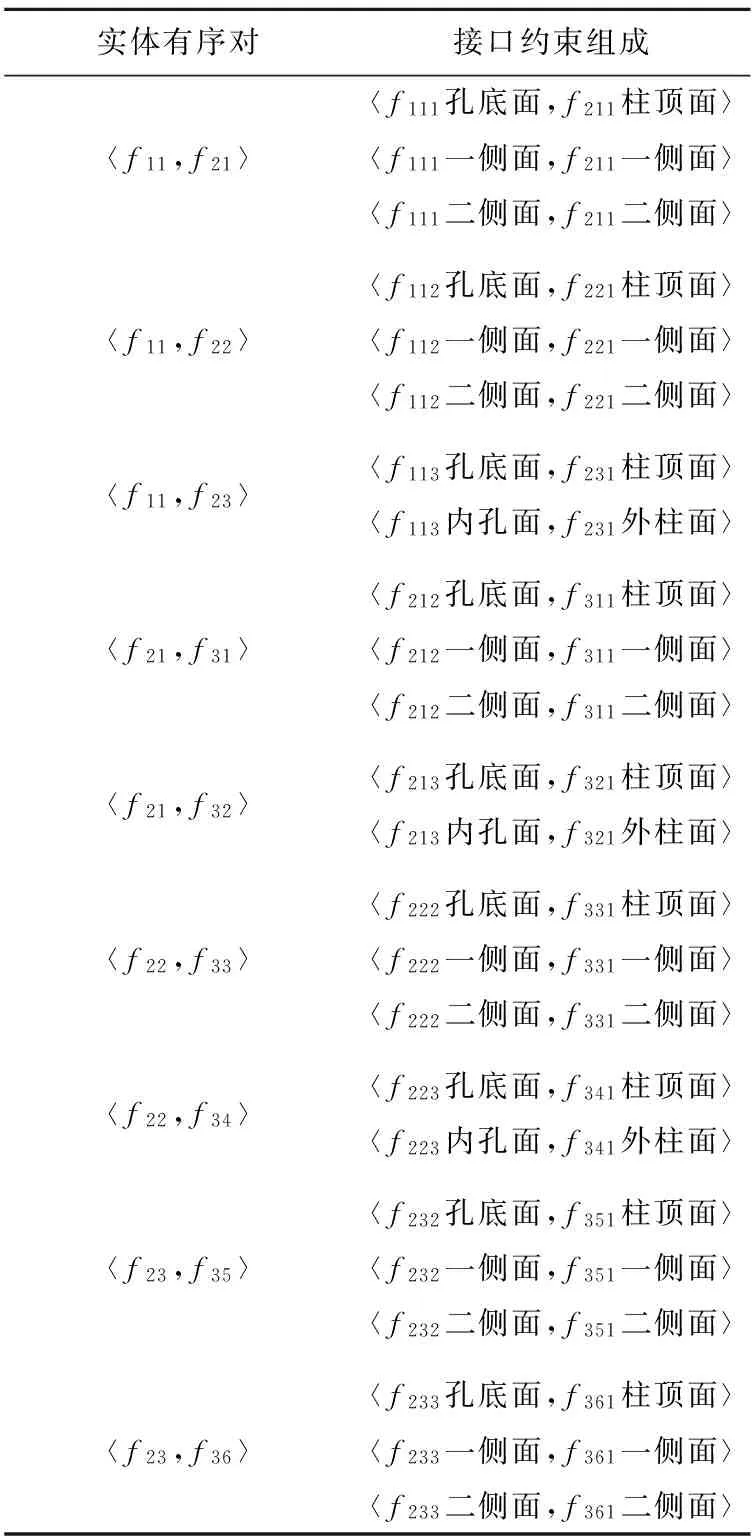
表2 图4对应接口约束组成
4.2接口约束向几何约束的转化
4.2.1圆截法接口定位
对于一个特定的模块有向图,使用圆截法定位每个实体的各个接口,如图5所示。
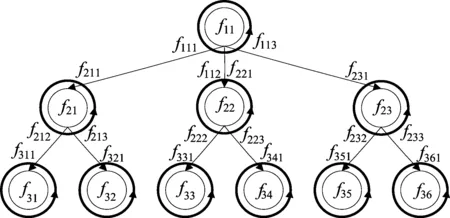
图5 圆截法接口定位
圆截法是在模块化产品系列对应的模块有向图中,以各个结点为圆心、ΔR为半径画圆,在保证该圆不与其他结点干涉的基础上,沿逆时针方向与该结点的各弧依次相交,从单入度弧开始依次标记各交点,从而定位实体包含的各个接口。
对于该种模块化产品结构,通过圆截法确定各弧的弧头接口代号均为1,且因为第1模块层入度为0,其接口定位从各出度弧开始标记。
4.2.2约束转化算法
由表2可知,通过接口约束库的组成,可将一般模块化产品系列中的接口约束分解为对应的几何约束集,其分解过程即接口约束向几何约束的转化过程。转化流程如下:
(1) 通过模块匹配搜索算法得到一个特定的实体有序列f1y1→f2y2→…→fnyn。
(2) 从实体有序列中从左至右取出每个弧的弧尾弧头所对应的实体fxyx、f(x+1)y(x+1)。
(3) 用圆截法确定fxyx实体的接口fxyxzx,f(x+1)y(x+1)实体的接口根据圆截法接口定位可知为f(x+1)y(x+1)1。
(4) 程序识别接口fxyxzx的组成Mx以及接口f(x+1)y(x+1)1的组成Mx+1,判断有序对〈fxyxzx.Mx,f(x+1)y(x+1)1.Mx+1〉是否属于表2的组成成分,若属于则根据表1中的接口约束形式施加几何约束,直至〈fxyx,f(x+1)y(x+1)〉有序对中所有属于表2的约束对均被施加约束。
(5) 判断f(x+1)y(x+1)的出度otf(x+1)y(x+1)是否等于0,若不等于0,则弧按照实体有序对f1y1→f2y2→…→fnyn依次前进,弧头和弧尾更新,返回步骤(2)循环执行;若等于0,则执行结束,f1y1→f2y2→…→fnyn实体有序列中的所有几何约束均被施加,接口约束转化完成。
利用模块匹配搜索算法得到的实体有序列f11→f23→f36来说明该约束转化算法。
首先选取第1个弧所对应的实体有序对〈f11,f23〉,用圆截法确定实体f11的接口为f113,实体f23的接口为f231;程序搜索属于表2中〈f11,f23〉的所有组成成分分别为〈f113孔底面,f231柱顶面〉以及有序对〈f113内孔面,f231外柱面〉,根据表1的接口约束形式对上述2个约束对施加约束;判断实体f23的出度otf23=2,因此弧前进对实体有序对〈f23,f36〉执行上述流程,最后判断otf36=0,执行结束。上述流程使得f11→f23→f36实体有序列中的2个接口约束均全部转化成几何约束,并施加在了对应的实体上,验证了上述约束转化算法的正确性。
5 应用实例
以某雷达典型结构为例,它具有很高的模块化特性,主要包含汇流盘(3种)、绝缘环(3种)、隔离环(4种)3个模块,如图6所示。
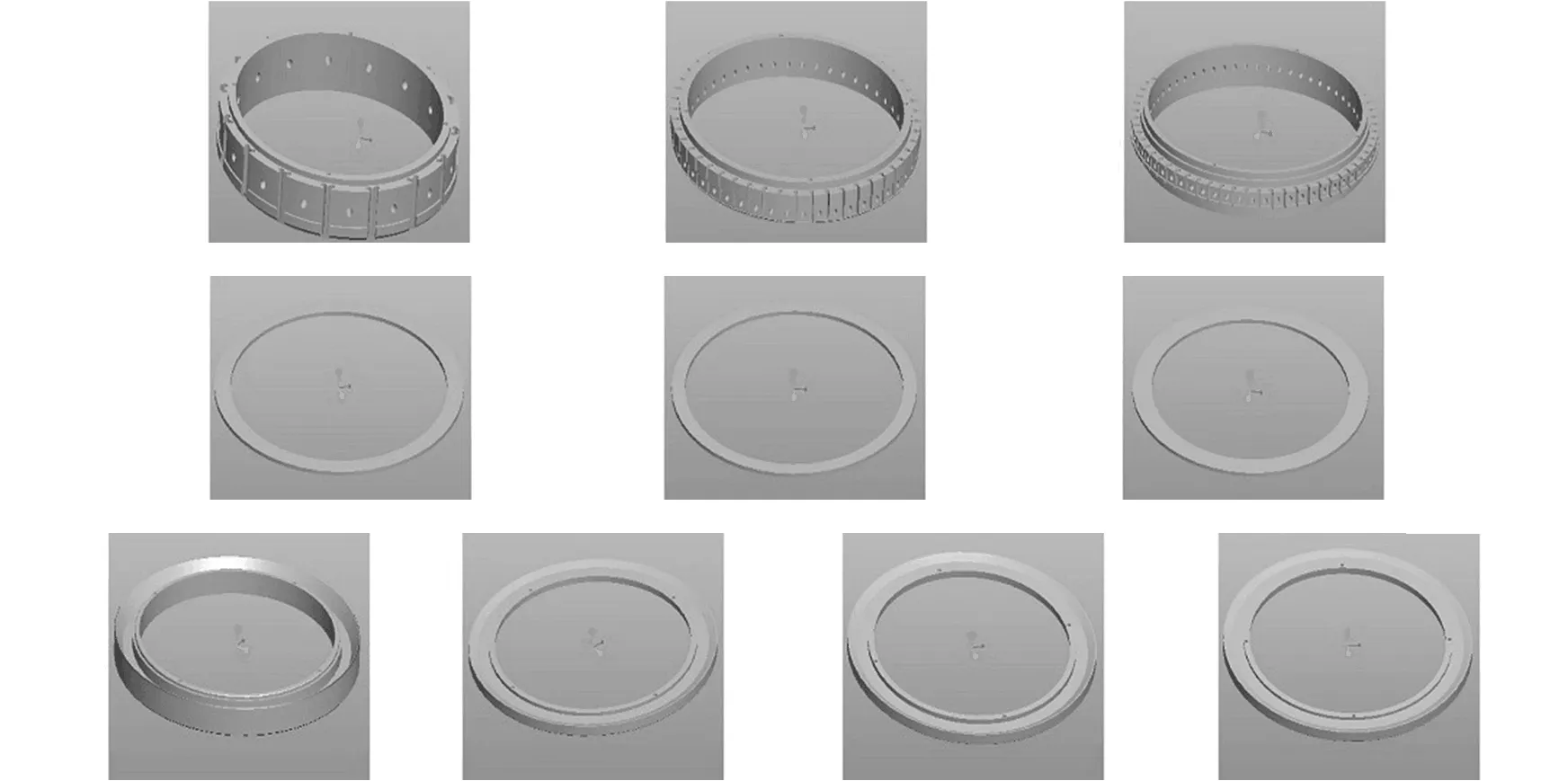
图6 雷达典型结构模块化组成
模块与模块之间的连接通过两侧的凹凸台实现,同时为了区别各自的尺寸(2种规格),定义上述模型的接口有4种,分别为凸台R1、凸台R2、凹台R1、凹台R2。模块有向图和有向图的f表示如图7所示,接口匹配形式为凹凸台R1连接和凹凸台R2连接,对应的接口匹配代号分别为1和2。模块关系邻接矩阵为:
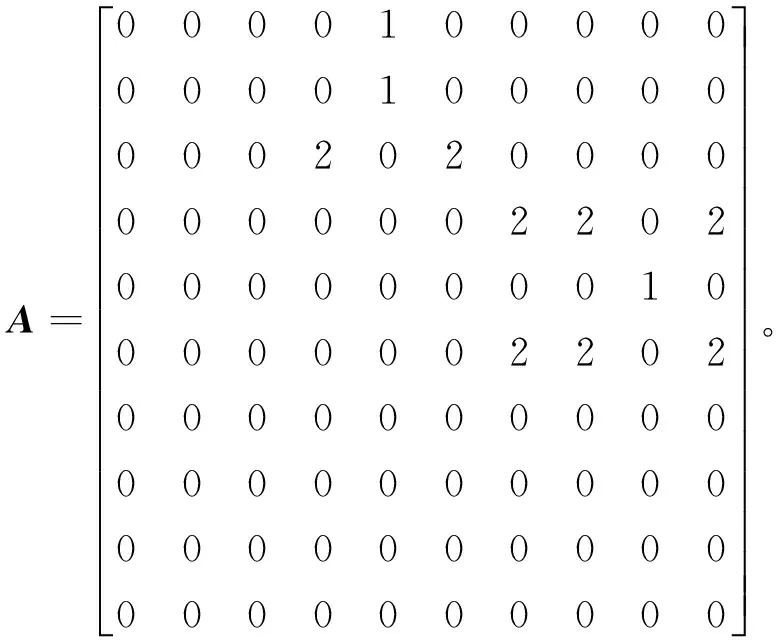
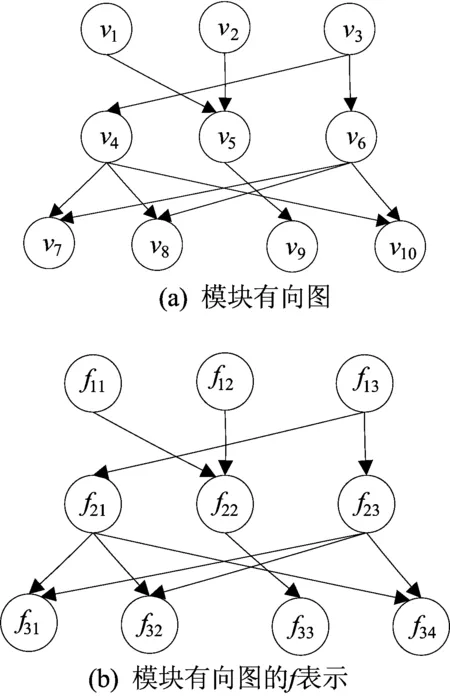
图7 雷达典型结构模块有向图和有向图的f表示
经模块匹配搜索算法得到的结点有序列及对应的实体有序列见表3所列,圆截法接口定位如图8所示。接口约束组成见表4所列,接口约束库组成见表5所列。

表3 结点有序列及实体有序列
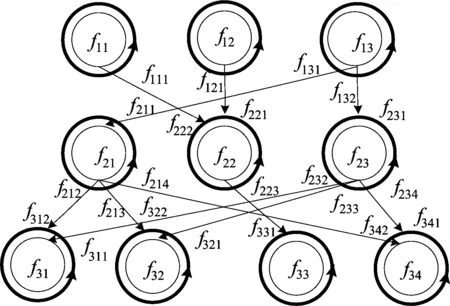
图8 圆截法接口定位
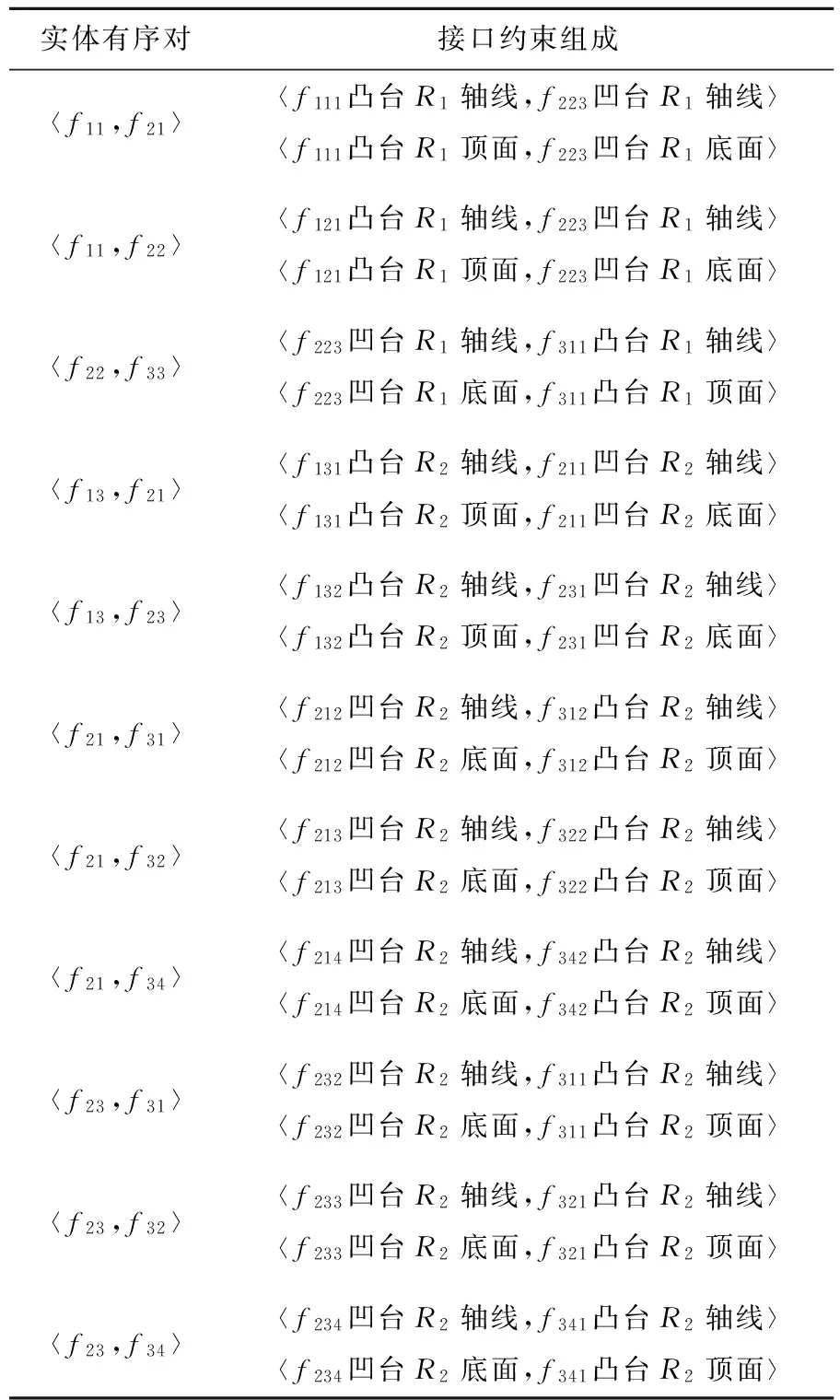
实体有序对接口约束组成
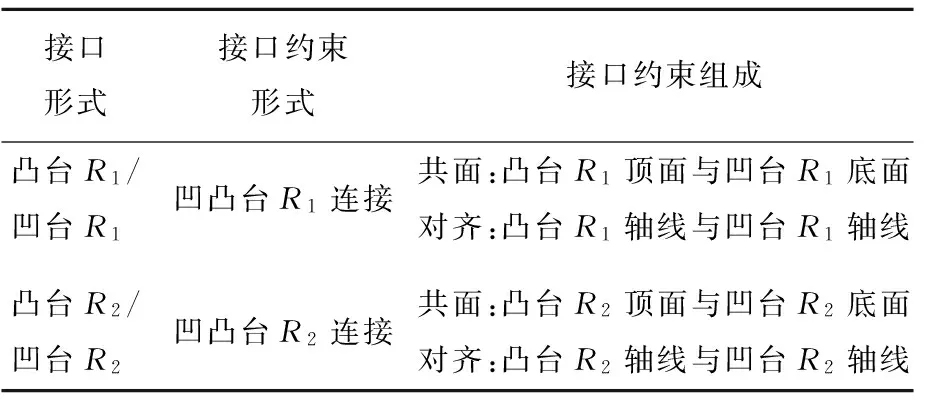
表5 接口约束库组成
本文采用上述方法,利用Pro/E的Pro/Toolkit二次开发技术开发了雷达模块化快速装配系统(radar modular rapid assembly system,RMRAS),系统界面如图9所示,利用该系统完成的几种模块化重组模型如图10所示。

图9 雷达模块化快速装配系统界面
图9a表示模块化设计小组连接同一个局域网进行协同工作(完成各自的模块设计任务);图9b表示本文所定义的接口是后续装配的前处理工作;图9c表示从库中选择某一个已添加的模块组合任务执行。经实际检验,通过该系统完成一个模块重组任务的效率比手工装配的提高60%以上。

图10 利用RMRAS系统完成的几种模块化重组模型
6 结 论
本文利用一个模块化产品结构实例模型,用模块有向图来表示其组成结构,用fxyz表示其各组成成分,从而建立该模块化产品系列的知识库;在知识库基础上建立了模块匹配关系库以及模块关系邻接矩阵,并基于此提出了模块匹配搜索算法,实现了模块间的自动匹配;采用圆截法对匹配成功的模块以及实体进行接口定位,并通过约束转化算法将接口约束转化成几何约束,并施加在对应的实体上,实现了在知识库基础上的模块化快速重组。
[1]侯亮,唐任仲,徐燕申.产品模块化设计理论、技术与应用研究进展[J].机械工程学报,2004,40(1):56-61.
[2]赵韩,朱可,张炳力,等.基于UG二次开发的参数化零件族系统[J].合肥工业大学学报(自然科学版),2006,29(8):929-932.
[3]高飞,肖刚,潘双夏,等.产品功能模块划分方法[J].机械工程学报,2007,43(5):29-35.
[4]祁国宁,杨青海.大批量定制生产模式综述[J].中国机械工程,2004,15(14):1240-1245.
[5]PARALIKAS J,FYSIKOPOULOS A,PANDREMENOS J,et al.Product modularity and assembly systems: an automotive case study[J].CIRP Annals-Manufacturing Technology,2011,60(1):165-168.
[6]SALONITIS K.Modular design for increasing assembly automation[J].CIRP Annals-Manufacturing Technology,2014,63(1):189-192.
[7]LAI X,GERSHENSON J K.Representation of similarity and dependency for assembly modularity[J].International Journal of Advanced Manufacturing Technology,2008,37(7):803-827.
[8]郭伟祥,刘志峰,刘光复,等.基于模块化思想的拆卸序列规划[J].计算机辅助设计与图形学学报,2005,17(3):498-504.
[9]刘振宇,谭建荣.面向过程的虚拟环境中产品装配建模研究[J].机械工程学报,2004,40(3):93-99.
[10]LI B T,HONG J,LI T,et al.Modular design of complex product based on the triple fusion of function/feature/knowledge[J].Journal of Shanghai Jiaotong University:Science,2010,15(5):563-570.
[11]ZHU F W,SUN X X,MILLER J,et al.Innovations in knowledge management:applying modular design[J].International Journal of Innovation Science,2014,6(2):83-96.
[12]邵晓东,殷磊,陆源,等.一种基于特征的快速装配方法[J].计算机集成制造系统,2007,13(11):2217-2223.
(责任编辑胡亚敏)
A rapid modular restructuring method based on knowledge reuse
HUANG Kang, CHEN Xiang, ZHU Xiaohui, XIA Gongchuan
(School of Machinery and Automobile Engineering, Hefei University of Technology, Hefei 230009, China)
In order to improve the efficiency of modular restructuring, a rapid restructuring method is proposed. The composition and expression form of knowledge are analyzed to describe the modular restructuring process and to construct the knowledgelib. Then the modular matching relationlib is established through the knowledgelib, and the modular relation adjacency matrix and modular matching search algorithm are constructed, so as to make the restructuring orientation. Finally, the process of the transform from interface constraints to geometric constraints is established based on the modular knowledgelib and matching algorithm. Taking the modular restructuring of a radar typical structure as an example, the rapid restructuring system is developed, and the validity of this method is verified.
knowledge reuse; modular restructuring; modular adjacency matrix; modular matching search algorithm; constraint transform
2015-03-19;
2015-04-25
国家科技支撑计划资助项目(2012KJZC0789)
黄康(1968-),男,安徽合肥人,博士,合肥工业大学教授,博士生导师.
10.3969/j.issn.1003-5060.2016.07.004
TP391.7
A
1003-5060(2016)07-0880-07
