基于调速能量的EMCVT电动汽车全局优化
2016-09-05叶明任洪李鑫
叶 明 任 洪 李 鑫
重庆理工大学汽车零部件先进制造技术教育部重点实验室,重庆,400054
基于调速能量的EMCVT电动汽车全局优化
叶明任洪李鑫
重庆理工大学汽车零部件先进制造技术教育部重点实验室,重庆,400054
综合考虑电机、电池、机电控制无级自动变速器效率,采用全局动态规划的方法,以电池荷电状态值为状态变量、变速器速比为决策变量,获取装备机电控制无级自动变速器的电动汽车在NEDC工况下的全局最优控制策略。建立了机电控制无级自动变速器调速模型,获取调速过程中的能量消耗。在全局优化控制策略的基础上,将调速能量消耗纳入指标函数,进一步优化无级变速器速比和电机扭矩。优化结果表明,采取所提出的优化策略可有效减少调速次数,进一步降低系统能量消耗。
电动汽车;机电控制CVT;全局优化;调速能量
0 引言
电动汽车以其极低的排放和可再生电能成为理想的新能源汽车。由于成本和使用特性等原因,搭载到电动汽车的变速器大多为减速器或少挡变速器[1-2],在复杂的车辆运行工况中,难以全面满足转速、扭矩和效率的要求。传统的电液无级自动变速器(continuously variable transmission, CVT)具有连续无级调速功能,可较好地调节系统工作区域,但它需要液压系统,在纯电动工况中,难以持续保证系统油压,使得传统CVT在电动汽车中的应用受到了极大的约束。机电控制无级自动变速器 (electric-mechanical continuously variable transmission, EMCVT)采用碟簧压紧,电机调速,不需要液压系统,可较好地解决上述问题[3]。
汽车金属带式无级变速器是当代最先进的汽车自动变速器之一。EMCVT是一款新型的汽车无级变速器,该无级变速器采用电机与齿轮减速器以及丝杆螺母机构组成的机械电子调速驱动机构实现调速功能,与常规的CVT相比,其最大的优势就是彻底抛弃了液压系统,在控制方便性、节油环保性方面和成本方面,有着无可比拟的优势,因此,EMCVT具有极高的研究和实用价值。2007年,重庆理工大学自主研发的汽车金属带式无级变速器示范生产线建成,这项技术已获得EMCVT国家专利。截至2009年6月,沈阳越士达汽车无级变速器有限公司已经完成了3台EMCVT的试制,2010年5月完成了EMCVT的测试。不久的将来,这种新型的国家自主知识产权的EMCVT将出现在市场上。采用电机调速、碟簧加压的EMCVT是一项全新技术,其理论和应用研究还相对较少。
由于对提高CVT效率的需求越来越迫切,故采用电控电动执行机构的CVT研究开始兴起,van de Meerakker 等[4]设计了一种CVT执行机构,采用一个电机通过行星轮系驱动主/从动带轮动盘,实现调速,但仅给出了设计方法,没有通过仿真和试验证明其性能。文献[5-6]分别提出了采用两个电机对主/从动带轮加压的方法,该方法对整车的电负荷能力有较高的要求。Zhang等[7]对EMCVT进行了速比稳定状态下的建模研究。降低能耗优化控制策略是电动车研究的主要方向之一,它主要分为实时优化策略以及全局优化策略[8]。其中,全局优化可实现整个循环工况(或短时期)内的能耗最小,是真正意义上的最优化。Ren等[9]采取实时优化策略对装备减速器、有级变速器及CVT的纯电动汽车进行了能耗对比分析,结果表明装备CVT的纯电动汽车的能耗比装备减速器的纯电动汽车的能耗降低了5%~12%。文明[10]研究了传统电液控制CVT与电动汽车的匹配调速的实时优化控制策略,以降低系统能耗。Zhang等[11]提出路况预测的控制思想,分别使用等效燃油消耗最小策略和动态规划算法对混合动力汽车能量管理策略进行优化。Wang等[12]提出了一种多目标全局优化的方法,采用该方法对搭载CVT的混合动力汽车进行了优化,降低能耗和排放。Stockar等[13]根据插电式混合动力系统实际运行工况,应用庞特里亚金极小值原理,对能量管理策略进行了全局优化。张博等[14]采用全局优化方法,对混合动力系统能量管理策略进行了优化,取得了较好的效果,但优化过程中没有考虑调速能量的问题。林歆悠等[15]提出了能量均衡的全局优化方法,并对插电式混合动力客车进行了能量管理策略优化,取得了较好的效果。舒红等[16]建立了插电式混合动力系统的预测控制模型,为全局优化算法的应用提供了可行的方法。由此可见,全局优化策略目前主要应用在混合动力车上,对纯电动车,特别是装备EMCVT的纯电动车的全局优化研究较少。在全局优化过程中,主要考虑电池荷电状态(state of charge, SOC)和电机扭矩对能耗的影响,而将速比和调速能量纳入全局优化策略的研究相对较少。EMCVT的电控电动执行机构只在变速时需要消耗能量,过度频繁调速会造成能耗的增加[17],在制订优化策略时还应当考虑调速能量消耗。本文以搭载EMCVT的电动汽车为研究对象,综合考虑电机、电池、EMCVT的效率以及调速能量消耗,采用全局动态规划的方法,获取降低系统能耗的全局优化策略。
1 系统组成
1.1插电式混合动力系统
图1所示为搭载EMCVT的插电式混合动力系统。动力源为汽油发动机和启动发电一体(integrated starter generator, ISG)电机,通过它们之间的自动离合器,可实现发动机和电机能量的合并与分离。ISG电机与EMCVT直接相连,通过差速器将动力传递到车轮。根据该系统特点,可实现发动机单独驱动、电机单独驱动、发动机/电机联合驱动、再生制动和行驶充电等工作模式。

1.发动机 2.自动离合器 3.ISG电机 4.机电控制CVT 5.动力电池组 6.12 V电池 7.启动电机图1 搭载机电CVT的插电式混合动力系统
1.2EMCVT工作原理
EMCVT结构原理如图2所示。EMCVT动力传递方式和传统电液控制CVT相同,仍然采用金属带和带轮实现,但调速和夹紧的方式不同。EMCVT采用电机与齿轮减速器以及丝杆螺母机构组成的机械电子调速驱动机构,推动主动带轮动盘做轴向移动,从而改变金属带的有效工作半径,实现速比的调节。夹紧力则通过碟簧机构实现。该系统结构相对简单,制造水平的要求相对较低,成本下降30%以上,可靠性提高,整机传动效率上升10%。搭载EMCVT的电动汽车,其驱动电机与EMCVT输入轴刚性连接,动力通过EMCVT输出轴传递到差速器,驱动车轮旋转。由于不需要单独构建液压系统,整个系统的结构和控制都得到简化。
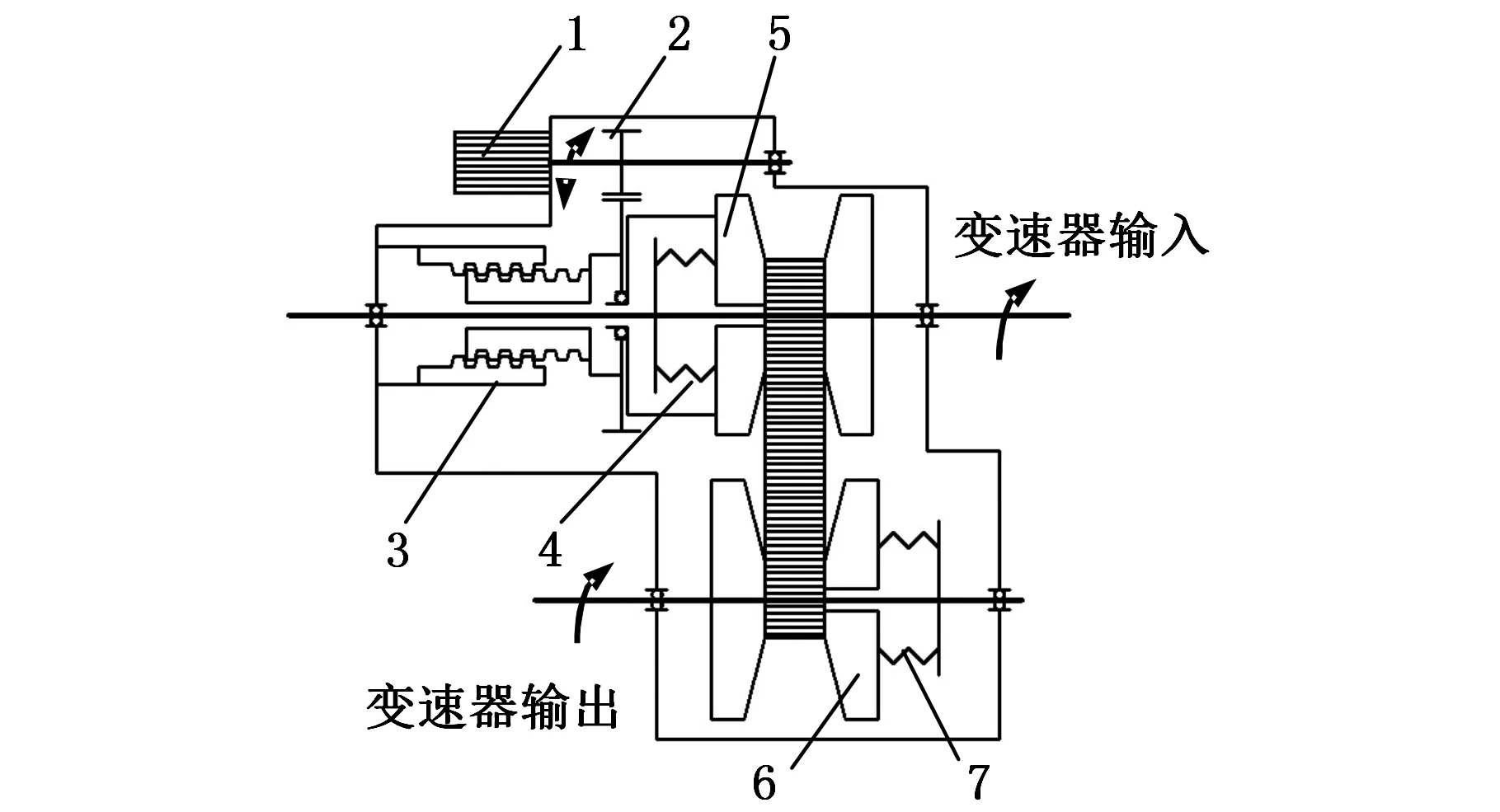
1.调速电机 2.齿轮减速机构 3.丝杆螺母机构 4,7.碟簧 5.主动带轮动盘 6.从动带轮动盘图2 机电控制CVT结构原理
2 调速能量模型
本文在系统全局优化中考虑调速能量消耗。要获取调速能量消耗,必须建立机电控制CVT调速模型。
2.1调速驱动机构
由图2可知,调速机构由调速电机、齿轮减速机构和丝杆螺母机构组成。本文主要关注调速的总能量消耗,因此,调速电机主要考虑其稳态特性(图3);齿轮减速机构和丝杆螺母机构简化为定效率的刚性固定传动机构。

图3 调速电机特性
2.2夹紧机构
从动带轮需求夹紧力FaBr可通过CVT传递扭矩以及相关参数来计算:
(1)
式中,Ti为最大输入扭矩;α为带轮半锥角;RA为主动带轮工作半径;fbA为主动带轮与金属带之间的摩擦因数,取0.08。
根据碟簧弹性特性,选取工作区域,使碟簧压力覆盖从动带轮需求夹紧力,获得从动带轮实际夹紧力FaB。
主动带轮夹紧力FaA由Worley推荐公式计算:
(2)
其中,βA为主动带轮包角,Fas为金属带对轴的作用力,由Miloiu推荐公式计算:
(3)
A=βB
式中,βB为从动带轮包角;b为常数,取2.29。
根据主动带轮夹紧力,选择合适的碟簧及其工作区间,从而获取主动带轮碟簧弹力FsA(图4)。当速比处于稳定状态时,主动带轮夹紧力与碟簧弹力的差值通过丝杆螺母补充;当处于调速状态时,调速机构必须先克服主动带轮夹紧力与碟簧弹力的差值,才能改变速比。

图4 主动带轮夹紧力和碟簧弹力
2.3速比变化率
CVT速比变化率规律可用Carbone模型来描述[18]:
(4)
Δβ=cΔβ0+cΔβ1Fs
式中,ic为速比;RB为从动带轮工作半径;iF为主从动带轮推力比;FA、FB分别为主从动带轮推力;iFs为主从动带轮稳态推力比;ωA为主动带轮角速度;Δβ为带轮形变系数;cΔβ0、cΔβ1为常数;kc(τc) 为随速比变化的多项式;D0为带轮中心距;ck0、ck1为常数。
带轮轴向位移可根据CVT几何参数关系由下式计算:
(5)
式中,xB为主动带轮轴向位移;Rmin为带轮最小工作半径;Rmax为带轮最大工作半径。
由于轮包角和近似为180°,主从动带轮上的工作半径之和近似为常量,故主从盘带轮轴向速度可表示为
(6)
由以上分析可知,当速比变化率、当前速比、主从动带轮稳态推力以及输入轴转速为已知条件时,便可确定主动带轮的动态推力FA。FA与FsA之差即调速机构负载。同时,由式(6)还可获取带轮轴向移动速度。考虑调速机构传动效率和调速电机效率,可以获取调速功率Pmc:
(7)
式中,ηtc为调速传动机构效率;ηmc为调速电机效率。
CVT速比与主动带轮动盘存在唯一对应关系,通过目标速比和调速功率可以预估调速能耗Emc:
(8)
式中,xAr为主动带轮目标位移;xA0为主动带轮初始位移;icr为目标传动比;ic0为初始传动比。
3 全局优化调速策略
本文采用动态规划算法求解速比全局优化策略。根据循环工况特征和汽车行驶力平衡方程,可以求出电动汽车电机需求扭矩:
(9)
式中,Tmr为电机需求扭矩;Fb为机械制动力;ma为车辆质量;g为重力加速度(取9.8m/s2);rw为车轮滚动半径;fr为滚动阻力系数;CD为风阻系数;A为迎风面积;ηt为传动系效率;δi为汽车旋转质量换算系数;va为车速。
根据当前车速,可获得电机需求转速nmr:
(10)
系统状态变量为电池荷电状态值SSOC,即
x(t)=SSOC(t)
(11)
(12)
式中,Ub为动力电池端电压;Pb为动力电池充放电功率;Rb为随SSOC变化的动力电池内阻;Cb为动力电池容量。
控制变量为
u(t)=ic(t)
(13)
指标函数定义为t时刻的能耗:
L(SSOC(t),ic(t))=Eb+Emc
(14)
它由电池能耗Wb和调速能耗Wmc两部分组成。
动力电池能耗Eb可由下式计算:
Eb=PbΔt
(15)
调速能耗由式(8)计算。
系统各参数还必须满足电池、电机和EMCVT的特性要求,其约束方程为
(16)
式中,SSOCmin、SSOCmax分别为电池荷电状态最小值和最大值;ic_min、ic_max分别为EMCVT速比最小值和最大值;nm_min、nm_max分别为电机转速最小值和最大值;Tm_min、Tm_max分别为电机在当前转速下的扭矩最小值和最大值;Pbc_min、Pbd_max分别为电池在当前荷电状态下的最小充电功率和最大放电功率。
由此,便可进行循环工况的全局优化计算。具体计算方法在相关文献中已有较详细的说明,不再赘述。
4 试验分析
搭载EMCVT的电动汽车主要参数见表1。
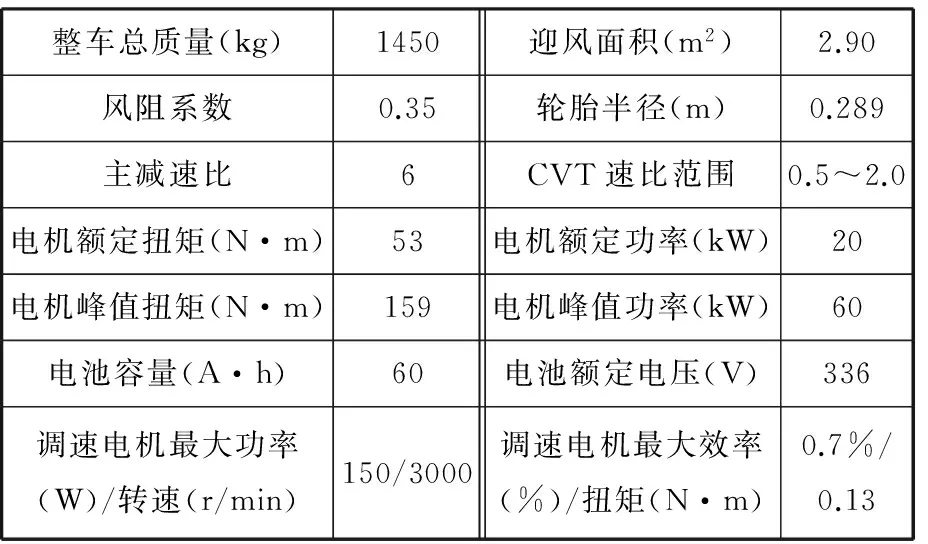
表1 电动汽车主要参数
主要总成及发动机舱的集成情况如图5所示。基于以上工作,完成了搭载EMCVT的电动汽车样车开发(图6)。

(a) 整车控制器(b)驱动电机及EMCVT

(c)动力电池(d)前机舱布置图5 系统关键总成

图6 原型样车
图7、图8所示分别为转鼓试验测试结果。图7中,采取传统的实时能量消耗最小优化策略,并且在制定控制策略时不考虑调速能量的影响。电池初始荷电状态值SSOC为0.7,连续运行3个New Europe Driving Cycle(NEDC)循环工况。NEDC循环工况由Economic Commission for Europe (ECE) 和Extra Urban Driving Cycle (EUDC)两部分组成。控制策略按照实时效率最高的原则,控制电机和EMCVT。图7b所示为EMCVT速比工作点。当车速较低(小于30 km/h)时,EMCVT速比主要处于较大区域,使电机工作转速升高。随着车速的增大,速比逐渐降低,从而降低电机工作转速,这样可使电机的工作转速主要位于1500~3500 r/min之间。同时,当需求扭矩发生变化时,EMCVT速比会作出相应的调整,使电机扭矩主要位于30~50 N·m之间。从而保证电机尽量工作在高效区(图7c)。调速功率主要集中在20~40 W之间(图7d),由于调速较为频繁,每次调速速比相差不大,调速功率较为均匀。在ECE循环阶段,电池充放电功率在30 kW以下;在EUDC阶段,加速需求功率和制动需求功率都较大,电池最大放电功率为48 kW,最大充电功率为32 kW(图7f)。当测试过程结束,最终SSOC为0.44,调速消耗能量为118 kJ,整车总能耗为1966 kJ,折合每百公里能耗为16.7 kW·h,EMCVT执行调速451次。图8所示为采用基于调速能量的全局优化策略,其余测试条件与图7相同。从图8可以看出,SSOC下降速度较图7平缓,EMCVT速比和电机工作点分布范围较广(图8b、图8c)。图8b中EMCVT速比工作区域明显比图7b中EMCVT速比工作区域大,这是因为控制策略不以系统瞬时效率最高为控制目标,而是根据整个驾驶过程对系统进行全局优化控制,并且考虑换挡能量对系统能耗的影响,降低换挡频率。调速功率主要集中在15~30 W,在每次NEDC循环末期会出现最大功率调速,这是因为速比差较大,为了迅速响应目标速比,调速电机满负荷工作(图8d)。在ECE循环阶段,电池充放电功率在25 kW以下;在EUDC阶段,电池最大放电功率为40 kW,最大充电功率为15 kW(图8f),电池充放电功率总体较图7f小。当测试结束,最终SSOC为0.53,调速消耗能量78 kJ,整车总能耗为1719 kJ,折合每百公里能耗为14.6 kW·h,EMCVT调速284次。图8与图7相比,调速能耗降低33.9%,总能耗降低12.6%,调速频率降低37%。总能耗降低主要是从整个驾驶过程的角度,对系统进行全局优化。在优化指标中,考虑调速能量影响,可以进一步降低调速能量消耗,降低调速频率,延长EMCVT的工作寿命。
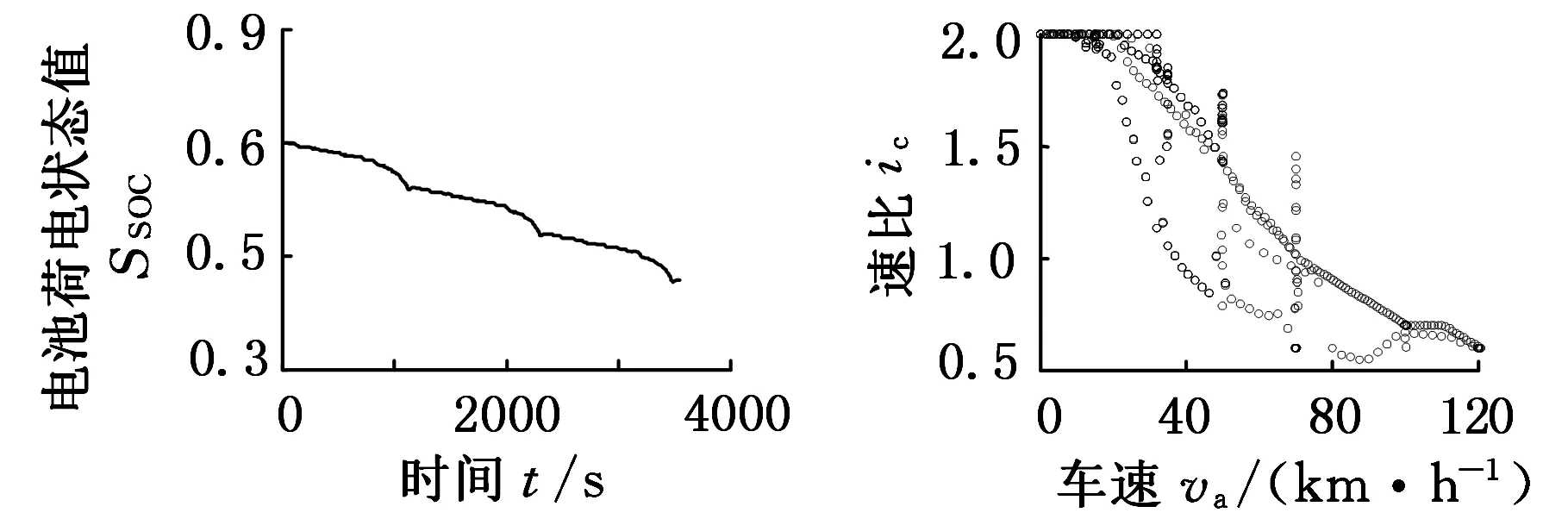
(a)电池荷电状态值曲线(b)速比工作点

(c)电机扭矩曲线(d)调速功率曲线

(e)调速能耗曲线(f)充放电功率曲线图7 实时优化策略

(a)电池荷电状态值曲线(b)速比工作点

(c)电机扭矩曲线(d)调速功率曲线
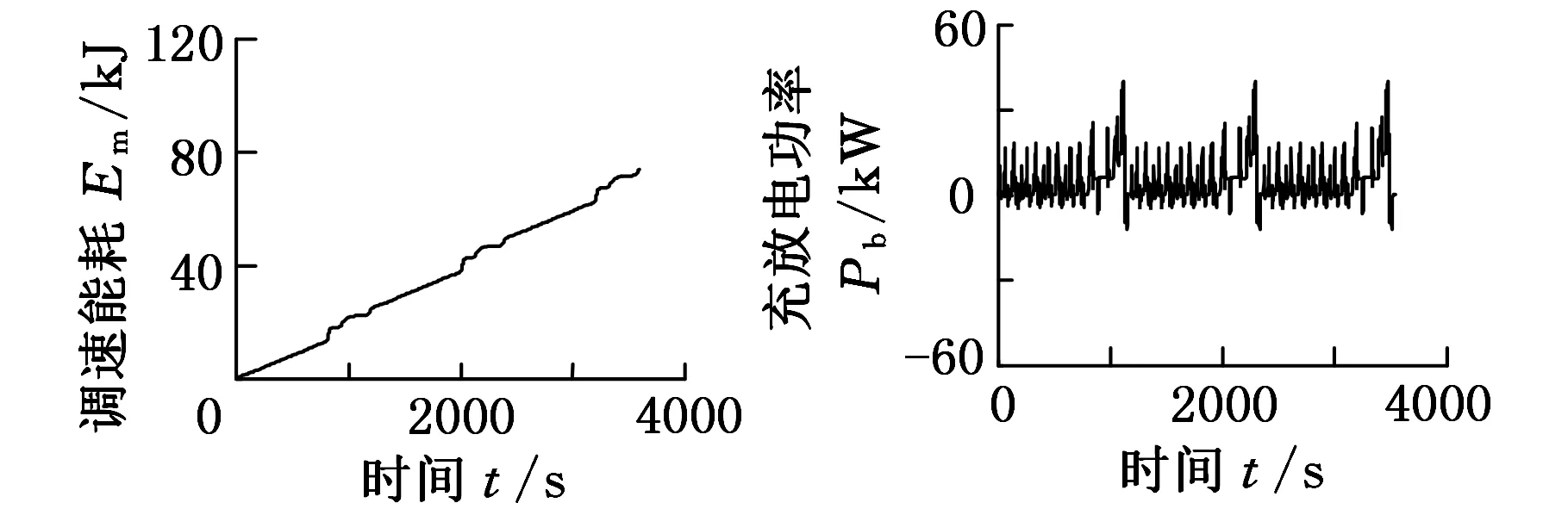
(e)调速能耗曲线(f)充放电功率曲线图8 全局优化策略
5 结论
(1)EMCVT在调速时要耗费能量,能量消耗与目标速比、推力比和速比变化率有关。
(2)在制订全局优化策略时,应当考虑EMCVT的调速能量,将其纳入指标函数。
(3)采取基于调速能量的全局优化策略,不仅能减小系统能耗,而且能降低调速频率,延长EMCVT的工作寿命,降低了系统成本。
[1]Gao Bingzhao , Liang Qiong. Gear Ratio Optimization and Shift Control of 2-speed I-AMT in Electric Vehicle[J]. Mechanical Systems and Signal Processing, 2015, 50/51(1): 615-631.
[2]曾虎, 黄菊花. 纯电动汽车的电机与变速器匹配[J]. 装备制造技术, 2010(2):40-42.
Zeng Hu, Huang Juhua. The Matching of EV between the Motor and the Transmission[J].Equipment Manufacturing Technology, 2010(2):40-42.
[3]程乃士, 郭大忠, 郝建军, 等. 机械加压、电子机械控制汽车无级变速器:中国,200620110951.5[P]. 2007-10-31.
[4]van de Meerakker K G O, Rosielle P, Bonsen B, et al. Design of an Electromechanical Ratio and Clamping Force Actuator for a Metal V-belt Type CVT[C]//7th International Symposium on Advanced Vehicle Control. (AVEC’04). Lisse,2006:78-83.
[5]Zhang Lanchun, Bei Shaoyi, Zhao Jingbo. Speed Ratio Control Study on CVT with Electrical Pulley Actuation System[J]. Applied Mechanics and Materials, 2011, 39: 342-346.
[6]Supriyo B, Tawi K B, Jamaluddin H, et al. Shifting Performance Fuzzy-PID Ratio Controller of Electro-Mechanical Continuously Variable Transmission[C]//3rd International Conference on Circuits, Systems, Control, Signals.Athens,2012: 272-277.
[7]Zhang Lei, Cong Xiaomei, Pan Hujian, et al. The Control System Modeling and the Mechanical Structure Analysis for EMCVT[J]. Telkomnika Indonesian Journal of Electrical Engineering, 2013, 11(7): 4159-4167.
[8]Salmasi F R. Control Strategies for Hybrid Electric Vehicles: Evolution, Classification, Comparison, and Future Trends [J]. IEEE Transactions on Vehicular Technology, 2007, 56(5): 2393-2404.
[9]Ren Q, Crolla D A, Morris A. Effect of Transmission Design on Electric Vehicle (EV) Performance[J]. Journal of Energy and Power Engineering, 2010, 4(3): 46-51.
[10]文明. CVT电动汽车驱动系统优化设计[D]. 武汉:武汉理工大学, 2009.
[11]Zhang C, Vahidi A, Pisu P, et al. Role ofTerrain Preview in Energy Management of Hybrid Electric Vehicles[J]. IEEE Transactions on Vehicular Technology, 2010, 59(3): 1139-1147.
[12]Wang Q, Frank A. Plug-in HEV with CVT: Configuration, Control, and Its Concurrent Multi-objective Optimization by Evolutionary Algorithm[J].International Journal of Automotive Technology, 2014, 15(1): 103-115.
[13]Stockar S, Marano V, Canova M, et al. Energy-optimal Control of Plug-in Hybrid Electric Vehicles for Real-world Driving Cycles[J].IEEE Transactions on Vehicular Technology, 2011, 60(7): 2949-2962.
[14]张博, 李君, 高莹,等. Plug-in混合动力汽车能量管理策略全局优 化研究[J].中国机械工程, 2010, 21(6): 715-720.
Zhang Bo, Li Jun, Gao Ying, et al. Study on Global Optimization of Plug- in Hybrid Electric Vehicle Energy Management Strategies[J].China Mechanical Engineering, 2010, 21(6): 715-720.
[15]林歆悠, 孙冬野, 秦大同, 等. 混联式混合动力客车全局优化控制策略研究[J]. 中国机械工程, 2011, 22(18): 2259-2263.
Lin Xianyou, Sun Dongye, Qin Datong, et al. Development of Power-balancing Global Optimization Control Strategy for a Series-parallel Hybrid Electric City Bus[J].China Mechanical Engineering, 2011, 22(18): 2259-2263.
[16]舒红, 聂天雄, 邓丽君, 等. 插电式并联混合动力汽车模型预测控制[J]. 重庆大学学报, 2011, 34(5): 36-41.
Shu Hong, Nie Tianxiong, Deng Lijun, et al. Model Predictive Control for a Plug-in Hybrid Electric Vehicle[J]. Journal of Chongqing University, 2011, 34(5): 36-41.
[17]叶明, 胡明辉. 机械自动变速 (AMT) 系统换挡能量分析[J]. 重庆理工大学学报, 2010,24(11): 1-6.
Ye Ming, Hu Minghui. Energy Consumption of Automatic Manual Transmission Actuator during Shift Progress[J].Journal of Chongqing University of Technology, 2010, 24(11): 1-6.
[18]Carbone G, Mangialardi L, Bonsen B, et al. CVT Dynamics: Theory and Experiments[J]. Mechanism and Machine Theory, 2007, 42(4): 409-428.
(编辑陈勇)
Global Optimization for Electric Vehicle Equipped with EMCVT Based on Shifting Energy
Ye MingRen HongLi Xin
Key Laboratory of Advanced Manufacturing Techniques for Automobile Parts, Ministry of Education,Chongqing University of Technology,Chongqing,400054
Integrating motor efficiency, battery state of charge (SOC) and EMCVT efficiency, the global optimization of EV equipped with EMCVT running in new Europe driving cycle (NEDC) was carried out based on dynamic programming. In this optimization, SOC and transmission ratio were state variable and decision variable respectively. Ratio shifting model was built to estimate energy consumption during shifting. New optimal control strategies were achieved by taking shifting energy consumption into cost function. With this control strategy, shift times and fuel consumed are both reduced.
electric vehicle(EV); electric-mechanical continuously variable transmission(EMCVT); global optimization; shifting energy
2015-06-26
国家自然科学基金资助项目(51275549);重庆市科技攻关计划资助项目(cstc2012gg-yyjsB60002)
U463.2
10.3969/j.issn.1004-132X.2016.09.019
叶明,男,1976年生。重庆理工大学汽车零部件先进制造技术教育部重点实验室副研究员、博士。主要研究方向为车辆动力传动系统综合控制。获省级科学技术进步一等奖、二等奖各1项。发表论文20余篇。 任洪,女,1991年生。重庆理工大学车辆工程学院硕士研究生。李鑫,男,1969年生。重庆理工大学汽车零部件先进制造技术教育部重点实验室实验师。
