探空仪系统动力学模型构建及仿真
2016-08-12孙宝京郭延松
马 林,孙宝京,郭延松
(沈阳炮兵学院 电子系,沈阳 110867)
探空仪系统动力学模型构建及仿真
马林,孙宝京,郭延松
(沈阳炮兵学院 电子系,沈阳110867)
摘要:针对目前测风数据处理模型数值模拟验证中雷达跟踪目标模型考虑不完善,不能够真实地反映探空仪在空气中的实际运动,在分析受力模型的基础上,通过拉格朗日方程构建探空仪系统在空气中受风力作用的动力学模型;通过仿真表明:仿真结果与实际情况更为相符,可为测风数据处理模型验证提供一种更为准确、有效的数值模拟模型。
关键词:动力学模型;探空气球;探空仪;仿真
本文引用格式:马林,孙宝京,郭延松.探空仪系统动力学模型构建及仿真[J].兵器装备工程学报,2016(6):76-78.
Citationformat:MALin,SUNBao-jing,GUOYan-song.ModelingandSimulationofRadiosondeSystem[J].JournalofOrdnanceEquipmentEngineering,2016(6):76-78.
目前,我军高空气象探测主要利用高空气象探测雷达等装备自动跟踪随探空气球升空的探空仪实现高空风的探测。由于高空气象探测雷达测量的高空风是间接测量值,需要通过数学模型计算获取,所以测风数据处理模型直接决定高空风测量的精度。在测风数据处理模型的验证上,目前普遍采用的方法是通过探测获取实际探测数据,对比不同数据处理模型的处理结果判断模型的优劣,国内通常采用与RS92GPS测风系统的数据处理结果进行对比[1-2],美军通常采用与现有已成熟运行的测风装备的数据处理结果进行对比[3-4]。但是以上方法验证的周期长、费用大,并且还没有仪器和手段能够获取变幻莫测的高空真实值,造成模型验证精度较差。所以,积极探索基于数值模拟的测风数据处理模型验证具有重要的现实意义。目前针对高空气象探测雷达跟踪目标的模拟多采用忽略探空仪质量和摆动情况的气球自由运动模型[5],但是由于高空气象探测雷达在探测中跟踪的是探空仪而非探空气球,探空气球和探空仪的运动为有约束运动,所以气球自由运动模型不能够真实的反映探空仪在空气中的实际运动情况。本文通过拉格朗日方程构建探空气球—探空仪系统在空气中受风力作用的动力学模型,为测风数据处理模型的验证提供一种更为准确、有效的数值模拟模型。
1 系统描述
探空气球—探空仪系统采用我军炮兵气象分队使用的气象站地面坐标系,如图1所示。气象站地面坐标系为左手直角坐标系,其原点o为高空气象探测雷达天线方位轴和俯仰轴的交叉点,x轴指向坐标北,y轴指向坐标东,z轴指向天顶。探空气球球皮质量为mball,探空仪质量为m,气球直径为D,探空气球通过放球绳与探空仪连接且放球绳长为l。系统在风的北分量 fx作用下沿x轴方向运动,在风的东分量 fy的作用下沿y轴运动,在气球升力 fz的作用下沿z轴运动。探空仪在空间摆动的角度为θx和θy,其中θx表示放球绳与其在oyz平面投影的夹角,θy表示放球绳在oyz平面的投影与z轴的夹角。忽略风对探空仪和放球绳的作用,忽略放球绳的重量,假设探空气球为正球形且在受风力作用下不发生形变。
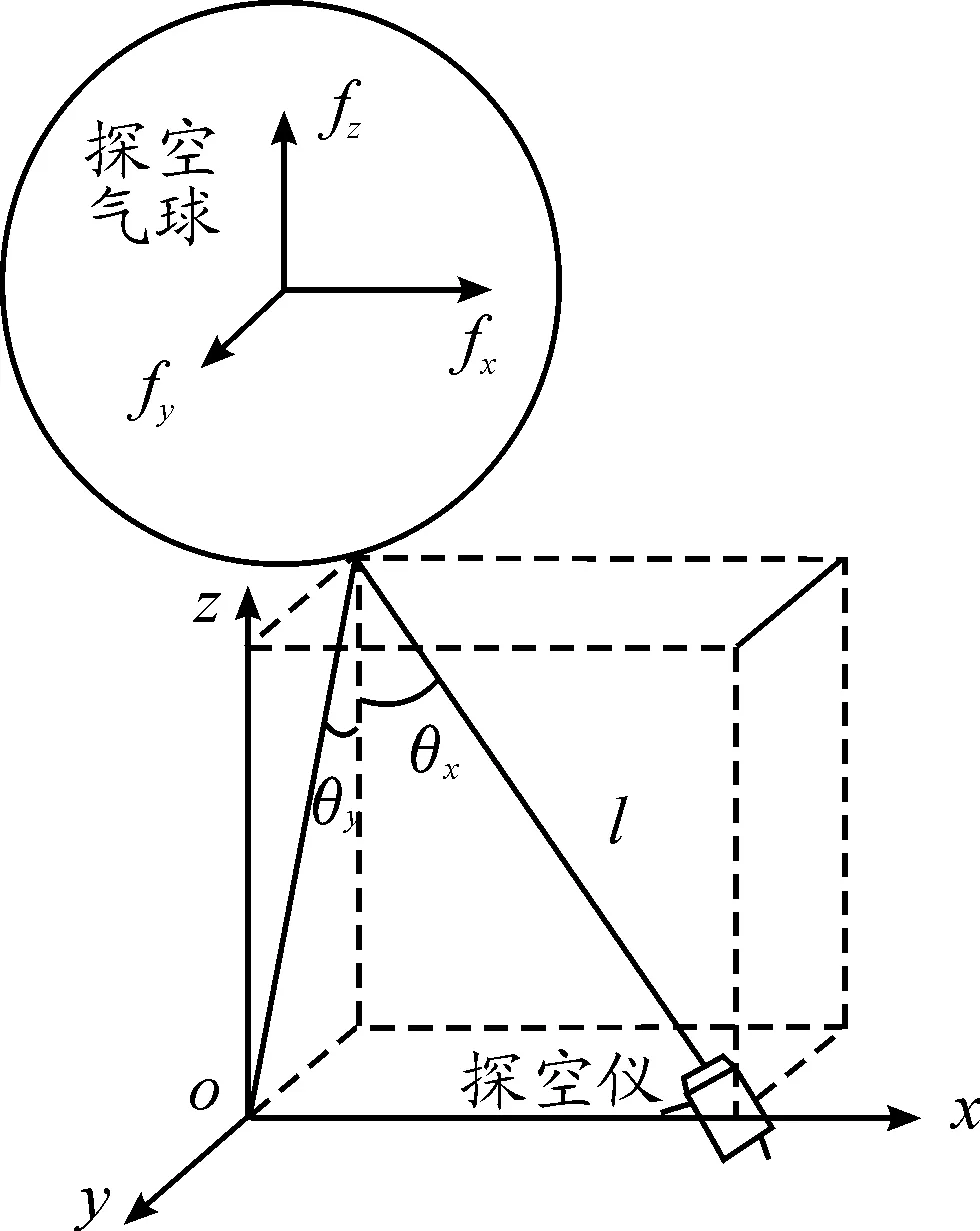
图1 气球—探空仪系统
2 模型构建
2.1受力模型
风对探空气球作用产生的作用力使探空气球朝风的去向运动。由文献[6]可知,该作用力是空气密度ρ、阻力系数c、风对气球的作用面积S和风速的函数。将风在气象站地面坐标系中分解为vx和vy两个分量,风沿x轴和y轴对系统的作用力 fx和 fy可表示为
(1)
球形气球的阻力系数c为0.2[7],风对气球的作用面积S取气球的最大截面积。
由于探空气球采用氢气为填充物,且氢气的密度远小于空气密度,因此系统z轴方向受到向上的升力作用。除此之外,系统在z轴方向还受到向下的重力和空气阻力作用。
根据阿基米德原理,直径为D的探空气球所受到的升力 flift是气球直径D、空气密度ρair、氢气密度ρh和重力加速度g的函数,表达式为
(2)
系统所受升力和系统重力之差为系统的净举力 ffree,表达式为
(3)
在系统受升力作用上升时,相对于空气垂直运动,产生垂直向下的空气阻力 fresist:
(4)
vrise为探空气球相对于空气的升速。由文献[8]可知,在高空探测中,通常假定气球的升速不变,并用以下式计算升速vrise:
(5)
因此,系统在z轴上所受的总作用力 fz为
(6)
2.2动力学模型
由于气球—探空仪系统在空气中进行有约束运动,可采用拉格朗日方程进行模型构建。拉格朗日方程的普遍形式为[9-10]
(7)
式中T为系统动能,qk为系统广义坐标,k为系统的自由度数,Qk为广义力。
根据图1,采用探空气球在气象站地面坐标系中的坐标(x,y,z)以及探空仪的摆角θx和θy作为系统的广义坐标系,对系统进行分析。根据式(7),可建立系统的拉格朗日方程组:
(8)
系统动能表达式为
(9)
根据图1所示的坐标系可知探空仪坐标为
(10)
将式(10)代入式(9)可得:
(11)
将式(11)代入式(8)可得探空气球—探空仪系统的动力学模型为
2.3角度模型
由于气象站地面坐标系的原点o为高空气象探测雷达天线方位轴和俯仰轴的交叉点,所以探空气球和探空仪相对于雷达天线的仰角和方位角可用下式计算。
3 仿真分析
以Matlab为工具,采用四阶龙格—库塔法求解微分方程组。设系统采用300g规格的气球,探空仪质量m=250g,氢气密度ρh=0.089 9kg/m3,空气密度ρair取炮兵标准气象条件规定的标准空气密度,重力加速度g=9.8m/s2,气球直径D=1.8m,放球绳长l=30m。设地面风速的x轴和y轴和分量分别为vx=5m/s、vy=5m/s,且每升高1m,vx和vy分别增加0.05m/s。
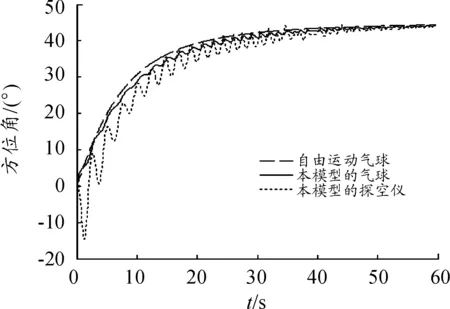
图2 方位角对比曲线
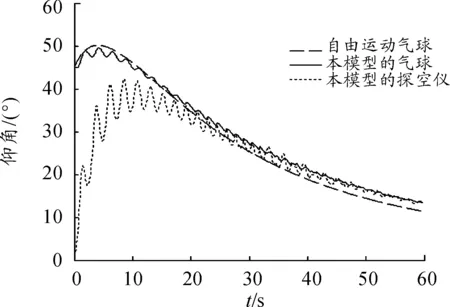
图3 仰角对比曲线
通过仿真可以发现,气球自由运动模型仅假定气球在空气中作自由运动,其方位角和仰角的变化比较平滑。由于本模型考虑了探空仪质量、探空气球直径、放球绳长度等因素对探空气球和探空仪运动的影响,探空气球和探空仪间的相互约束作用使气球和探空仪的方位角和仰角都呈现周期性振荡变化。在探测的前20s,由于气球和雷达的水平距离和高度都较近,探空仪的角度振荡幅度较大,探空气球和探空仪的角度相差也较大,随着水平距离和高度的逐渐增大,探空气球和探空仪的角度差逐渐减小。两种模型相比,本文提出的探空气球—探空仪系统运动模型的仿真结果与实际情况更为相符。
4 结论
本文综合考虑探空仪质量、探空气球直径、放球绳长度等因素,通过拉格朗日方程构建探空仪系统在空气中受风力作用的动力学模型。通过仿真表明该模型能够更准确、全面的反映探空仪系统实际运动情况,可为测风数据处理模型验证提供更准确的数值模拟数据。
参考文献:
[1]王缅,李伟,陈永清,等.L波段探空系统高空风平滑计算方法探讨[J].气象,2011,37(1):85-91.
[2]梁建平,李宇中,黎洁波,等.L波段高空气象探测系统测风算法改进探讨[J].气象科技,2014,42(5):753-758.
[3]HAINESP,COGANJ,JAMESONT,etal.AnalysisoftheComputer,MeteorologicalData-Profiler’s(CMD-P)CapabilitytoAssimilateRegionalRadiosondeData[R].WhiteSandsMissileRange:U.S.ArmyresearchLaboratory,2012:19-21.
[4]JAMESC,BRIANR.AMethodforExtrapolationofAtmosphericSoundings[R].WhiteSandsMissileRange:U.S.ArmyresearchLaboratory,2014:39-42.
[5]贺宏兵,章建军.基于小波变换的高空风估计[J].解放军理工大学学报(自然科学版),2002,3(2):81-84.
[6]戴秋敏,方贤德,王昊,等.大气模型对高空气球运动特性和热特性的影响[J].计算机仿真,2013,30(9):79-82.
[7]杜亮,洪冠新.双系缆气球绳网系统抗风能力的仿真分析[J].系统仿真学报,2007,19(14):3139-3141.
[8]林晔.大气探测学教程[M].北京:气象出版社,1993.
[9]王许可.机载武器发射系统刚柔耦合动力学仿真分析[J].四川兵工学报,2014(7):9-12.
[10]崔大朋,张建坤,徐松,等.旋转弹框架式导引头动力学模型及分析[J].四川兵工学报,2015(6):38-40.
(责任编辑周江川)
doi:10.11809/scbgxb2016.06.018
收稿日期:2016-01-24;修回日期:2016-02-25
作者简介:马林(1983—),男,硕士,讲师,主要从事弹道气象研究。
中图分类号:P413
文献标识码:A
文章编号:2096-2304(2016)06-0076-04
ModelingandSimulationofRadiosondeSystem
MALin,SUNBao-jing,GUOYan-song
(DepartmentofElectronics,ShenyangArtilleryAcademyofPLA,Shenyang110867,China)
Abstract:Aiming at the imperfection of the radar target tracking simulation model in numerical wind data processing verification model, and that it cannot reflect the actual movement of radiosonde in the air, the dynamics model of radiosonde in the air was derived from Lagrange equation based on the analysis of stress model. The simulation shows the simulation result is more consistent with the actual situation, which provides a more accurate and effective numerical simulation model for wind data processing model verification.
Key words:kinetic model; sounding balloon; radiosonde; simulation