基于网格中心点虚拟参考站的伪距差分方法
2016-08-10秘金钟2方书山2李鹤峰4张晶晶5
陈 振,秘金钟2,王 权,方书山2,李鹤峰4,张晶晶5
(1.青岛市勘察测绘研究院,山东青岛266032;2.中国测绘科学研究院,北京100830;3.国家测绘地理信息局卫星测绘应用中心,北京101300;4.国核电力规划设计研究院,北京100095;5.四川省第一测绘工程院,四川成都610100)
基于网格中心点虚拟参考站的伪距差分方法
陈振1,秘金钟2,王权3,方书山2,李鹤峰4,张晶晶5
(1.青岛市勘察测绘研究院,山东青岛266032;2.中国测绘科学研究院,北京100830;3.国家测绘地理信息局卫星测绘应用中心,北京101300;4.国核电力规划设计研究院,北京100095;5.四川省第一测绘工程院,四川成都610100)
传统网络伪距差分定位方法中,服务端播发多个基准站观测卫星的伪距改正数和坐标,流动站用户接收所有基准站伪距改正数后内插得到自身所需伪距改正数。为简化流动站算法、保护国家大地坐标安全,本文提出了基于网格中心点虚拟参考站的伪距差分方法,该方法是将经纬线网格的中心点作为虚拟参考站,将基准站的伪距改正数内插到该虚拟参考站上,播发各虚拟参考站坐标和伪距改正数,流动站通过单点定位确定所在网格,利用其中心点上参考站的伪距改正数进行差分定位。试验表明,该方法在静态与动态情况下平面与高程方向均能获得亚米级定位。
伪距差分定位;网格中心点虚拟参考站;伪距改正数;连续运行参考站系统;反距离权重插值
随着我国自主研发的北斗导航定位系统(BeiD-ou Navigation Satellite System,BDS)于2012年底正式开始在亚太地区提供区域导航定位服务[1],兼容BDS系统的导航定位服务也已提上日程。而在智能交通系统中,交通信息采集、车辆调度控制、车辆监控以及紧急救援等都需要动态、实时、准确、连续地掌握车辆的位置信息[2],而伪距差分方法可满足以上需求。
伪距差分定位方法是局域增强系统的一种实现形式,可分为基于单基准站模式和基于多基准站模式两种。基于单基准站模式仅需一台基准站接收机用于采集伪距观测值,利用基准站已知坐标求解伪距改正数,流动站用户直接将该改正数与自身采集的伪距观测值融合,实现差分定位[3]。该方法的缺陷在于随着流动站与基准站间距离的增大,两者间大气误差相关性降低,最终导致流动站定位精度降低。基于多基准站模式是指利用周围多个基准站的伪距改正数,内插出流动站伪距改正数,流动站利用改正数实现差分定位[4-6]。该方法合理利用了基准站数据,扩大了定位的空间范围;但该方法将基准站坐标播发给流动用户,因此存在安全风险。
应用基于多基准站伪距差分方法进行定位的过程中,当基准站数目较多、范围较大时,为合理利用各基准站信息和保护国家大地点坐标安全,提出了基于网格中心点虚拟参考站的伪距差分方法。该方法将测区以经纬度网格为边界划分成规则的区域,利用合理距离范围内基准站的伪距改正数内插网格中心点的伪距改正数,流动站直接利用所在网格(通过单点定位确定)的中心点改正数进行伪距差分定位。
一、基于网格中心点虚拟参考站的网络伪距差分模型
对BDS+GPS双系统进行数学模型分析,其空间部分由地球静止轨道卫星(geostationary orbit,GEO)、倾斜地球同步轨道卫星(inclined geosynchronous orbit,IGSO)和中圆地球轨道卫星(medium earth orbit,MEO)3类卫星组成,地面部分由t个基准站Bi、等间隔经纬线划分的m个规则网格Gk和流动站M组成(1≤i≤t,1≤k≤m),其中流动站M位于网格Gq内,如图1所示。
1.基准站伪距改正数生成模型
已知基准站Bi的精确坐标为,,),当前历元同时观测到r颗卫星,则第i个基准站到第j(1≤j≤r)颗卫星的伪距观测方程为式中,为基准站Bi上卫星j的星历误差;c为光速;?为基准站Bi接收机钟差;δtj为卫星j的钟差;为基准站Bi上卫星j的电离层折射改正;为基准站Bi上卫星j的对流层折射改正;?为基准站Bi上伪距观测噪声;ρBji为 基准站Bi至卫星j的几何距离,其表达式为
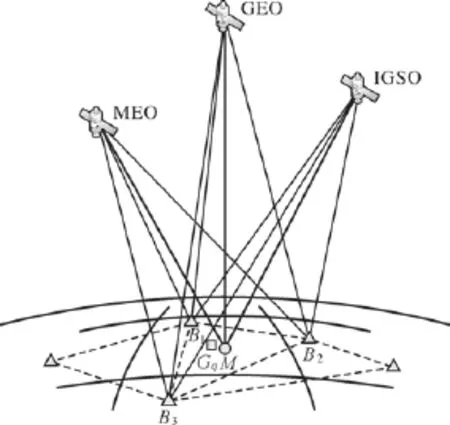
图1 基于网格中心点虚拟参考站的伪距差分定位


式中,(Xj,Yj,Zj)为卫星j发射信号时刻的三维坐标;(XBi,?YBi,ZBi)为基准站Bi三维已知坐标。
基准站Bi对卫星j的伪距改正值δρBj为式中,dtBi为计算所得接收机钟差;δtBi为剔除钟差后的基准站Bi钟差残差。

2.网格中心点虚拟参考站伪距改正数生成模型
假设网格中心点虚拟参考站 Gk附近有n个(3≤n≤t)基准站的伪距改正数可用,利用内插系数ai(i=1,2,…,n)将各基准站Bi的伪距改正数融合,所得该虚拟参考站的综合伪距改正值δρjGk可表示为(4)式中,ak,i为基准站 Bi伪距改正数的内插系数。本文以反距离权重插值法为例进行说明,其数学模型[7-9]为

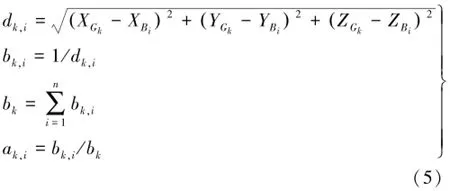
式中,dk,i为虚拟参考站Gk与基准站Bi之间的距离;bk,i为距离 dk,i的倒数;bk为虚拟参考站 Gk与n个基准站Bi的距离倒数之和。
由式(5)可知,ak,i满足条件

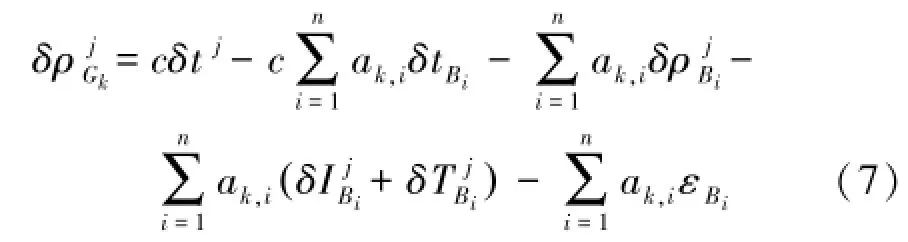
由式(4)、式(6)可化简网格中心点虚拟参考站Gk的综合伪距改正数为
式中:分别为两级最小差及两级最大差;ρ∈[0,1]为分辨系数,一般ρ取0.5,ρ越大,分辨率越大;ρ越小,分辨率越小。
3.流动站的伪距差分定位模型
利用单点定位计算流动站概略位置,将其化作经纬度后进行判断,假设流动站M位于网格Gq内,将该网格中心点虚拟参考站伪距改正数作为流动站的伪距改正数。流动站M的伪距观测方程为
流动站M单点定位粗略确定所在网格,并利用所在网格Gq的中心点虚拟参考站的伪距改正数ρGj
k修正其伪距观测值RMj为

式中,消除了流动站M到卫星j的钟差tj。
在一定空间范围内,基准站与流动站的卫星星历误差和大气误差(电离层、对流层延迟)具有空间相关性,进行差分可以大大削弱这些误差[10-11],而接收机钟差残差和随机误差不存在该空间相关性,无法通过空间内插模型进行消除。因此虚拟参考站综合伪距改正数δφjGq对移动站伪距观测值ρjM修正结果为


式中,P为BDS、GPS系统在融合系统中的权比分配;

二、试验分析
为分析基于网格中心点虚拟参考站伪距差分方法的定位效果,设计静态和动态两套试验方案,试验数据均来自中国测绘科学研究院在四川省建立的BDS+GPS CORS网,选取其中MNZU、MNYG、ZNJG、CNDU和DEYG 5个CORS站,各CORS站点精确坐标已知。所有CORS站均使用和芯星通 UR370-CORS BDS+GPS+GLONASS三系统七频接收机(单点定位标称精度为1.5 m)采集BDS-GPS的伪距观测数据。
1.基于网格中心点虚拟参考站伪距差分方法静态测试分析
本试验在BDS+GPS CORS网中选取MNZU、MNYG、ZNJG和CNDU 4站作为基准站,以间隔0.5°经纬线所围成网格的中心点作为虚拟参考站,DEYG站作为流动站,基准站、虚拟参考站和流动站空间位置分布如图2所示。试验数据采集时间为GPST 2014-08-30 00:00:00—23:59:59,采样间隔为1 s,卫星截止高度角为10°。通过基于C++编写的BDSGPS网格伪距差分定位后处理程序进行数据处理。

图2 静态测试测站分布
利用MNZU、MNYG、ZNJG和CNDU的BDS的B1、GPS的 L1频点伪距观测值,对位于东经104.0°—104.5°、北纬31.0°—31.5°所围成的网格内的流动站DEYG进行网格中心点伪距差分定位,求解出DEYG站24 h的定位结果。将DEYG站已知坐标作为参考值,则伪距差分定位结果在北向、东向和天顶方向分量上的误差序列如图3所示。
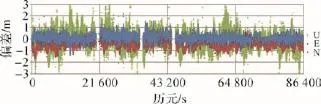
图3 N、E、U方向上静态伪距差分定位误差序列
利用单位权中误差来反映两者的一致性,其表达式为

式中,Δi为第i历元两者的偏差;n为观测历元总数。利用式(13)求解静态伪距差分定位结果的单位权中误差和平均绝对值误差(见表1)。

表1 网格中心点虚拟参考站伪距差分定位结果精度m
由图3可看出,网格中心点伪距差分方法静态定位时,在N和E方向定位精度较高,大部分定位结果小于1 m,在U方向大部分定位偏差小于2 m,经统计共得到72 646个历元的定位结果,其中共68 636个历元水平方向绝对偏差小于1 m,约占总历元的94.5%;由表1可看出,该方法的定位精度较高,虽然平均值与已知坐标在E方向存在系统性偏差,但单位权中误差在水平方向上外符合精度仍达到亚米级精度。
2.基于网格中心点虚拟参考站伪距差分方法动态测试分析
本试验在BDS+GPS CORS网中选取MNZU、MNYG、ZNJG和CNDU 4站作为基准站,以间隔0.5°经纬线所围成网格的中心点作为虚拟参考站,架设接收机和天线的车辆作为流动站由T1沿高速行驶到T2,该流动站使用和芯星通UR240 BDS+GPS双系统四频接收机(单点定位标称精度为1.5 m)采集BDS-GPS动态观测数据,基准站、虚拟参考站空间位置和流动站动态路线分布如图4所示。试验数据采集时间为GPST 2014-09-02 2:10:31—4:18:24,采样间隔为1 s,卫星截止高度角为10°。通过基于C++编写的BDS+GPS网格伪距差分定位后处理程序进行数据处理。
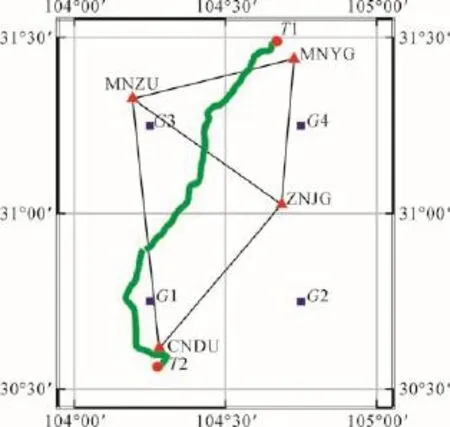
图4 动态测试测站分布
经后处理程序计算,共解算出7355个历元,丢包率4.1%,主要原因是流动站车辆行驶的高速上有较多立交桥,会遮挡流动站接收机天线造成无法采集观测数据。以天宝后处理软件(Trimble business center,TBC)动态基线固定解作为参考值,相应的伪距差分定位果在N、E、U分量上的误差序列如图5所示。
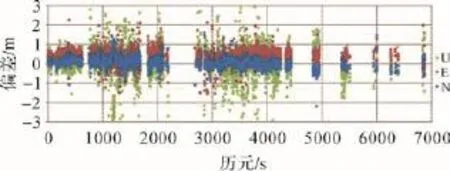
图5 N、E、U方向上动态伪距差分定位误差序列
图5中,误差序列出现中断是由于TBC软件仅解算出3496个固定解,与伪距差分定位共同解算历元数为3436。动态伪距差分定位结果的单位权中误差和平均绝对值误差(见表2)。

表2 网格中心点虚拟参考站伪距差分定位结果精度m
由图5可看出,网格中心点虚拟参考站伪距差分方法的动态定位结果,与TBC动态基线固定解相比,在N和E方向定位精度较高,大部分定位偏差小于1 m,在U方向定位偏差大部分小于2 m,经统计水平方向绝对偏差小于1 m的历元数为3230,约占所有历元的94.0%;由表2可看出,该方法的定位精度较高,虽然平均值与已知坐标在E方向存在系统性偏差,但单位权中误差在水平方向上外符合精度仍达到亚米级精度。
三、结束语
本文采用基于网格中心点虚拟参考站的伪距差分定位方法,合理利用多个基准站观测信息,消除了卫星钟差、卫星星历误差、电离层延迟误差和对流层延迟误差,简化了流动站算法,避免了国家大地坐标安全隐患。静态与动态试验结果证明,仅采用单频伪距观测值的差分定位结果,与参考值外符合精度在水平与高程方向均优于1 m,可满足常规导航服务的需求。
[1] 杨元喜,李金龙,王爱兵,等.北斗区域卫星导航系统基本导航定位性能初步评估[J].中国科学(地球科学),2014,44(1):72-81.
[2] 马庆禄,马丹,李泽慧,等.车辆定位与导航系统[M].长沙:中南大学出版社,2014,:6-7.
[3] 党亚民,秘金钟,成英燕.全球导航卫星系统原理与应用[M].北京:测绘出版社,2007:140.
[4] 李鹤峰,秘金钟,党亚民,等.基于CORS的多基准站BDS/GPS融合差分网定位性能分析[J].大地测量与地球动力学,2014,34(6):81-85.
[5] 兰孝奇,张兵良,黄继红,等.GPS伪距差分定位技术的试验研究[J].河海大学学报(自然科学版),2004,32(3):300-303.
[6] 邓健,王庆,潘树国,等.基于多参考站的分米级GPS伪距差分定位方法[J].东南大学学报(自然科学版),2010,40(2):316-319.
[7] 李永川,施昆.多基站GPS测量内插模型的比较分析[J].地矿测绘,2005,21(3):1-3.
[8] WANG Yongcheng,SONG Maozhong.An Approach to Improve Pseudo-range Differential GPS[J].Transactions of Nanjing University of Aeronautics&Astronautics,1997(2).
[9] 徐忠燕,张传定.局域差分GPS改正数学模型分析与比较[J].海洋测绘,2007,27(1):24-26.
[10] FARRELL J,GIVARGIS T.Differential GPS Reference Station Algorithm:Design and Analysis[J].IEEE Transactions on Control Systems Technology,2000,8(3): 519-529.
[11] 喻国荣,王庆,彭慧.多参考站网络的虚拟观测值生成算法[J].东南大学学报(自然科学版),2007,37 (6):1113-1116.
[12] 高星伟.GPS/GLONASS伪距差分定位数据处理[J].测绘通报,2000(6):1-3.
[13] 高星伟,过静珺,程鹏飞,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报,2012,41(5): 743-748.
[14] 李鹤峰,党亚民,秘金钟,等.BDS与 GPS、GLONASS多模融合导航定位时空统一[J].大地测量与地球动力学,2013,33(4):73-78.
Method of Pseudo-range Differential Positioning Based on Virtual Reference Stations in the Center of Grid
CHEN Zhen,BEI Jinzhong,WANG Quan,FANG Shushan,LI Hefeng,ZHANG Jingjing
10.13474/j.cnki.11-2246. 2016.0212.
P228.4
B
0494-0911(2016)07-0005-05
2015-10-26;
2016-04-26
测绘地理信息公益性行业科研专项(B1503);国家自然科学基金(41304030);国家863计划(2013AA122501;2015AA124001);北斗分析中心项目(GFZX0301040308-06);中国测绘科学研究院基本科研业务费(7771416;7771503;7771519);四川测绘地理信息局科技支撑项目(J2015ZC01);四川省科技厅项目(2015SZ0046);国家测绘地理信息局科技项目(2016KJ0200;2016KJ0205);国家重点研发计划(2016YFB0502105)
陈 振(1990—),男,硕士生,主要研究方向为GNSS局域差分定位。E-mail:chenzhencasm@163.com
引文格式:陈振,秘金钟,王权,等.基于网格中心点虚拟参考站的伪距差分方法[J].测绘通报,2016(7):5-9.