牛顿环实验的MATLAB仿真
2016-07-22崔海瑛吴春梅赵大伟王馨玉
崔海瑛,吴春梅,赵大伟,王馨玉
(大庆师范学院 机电工程学院,黑龙江 大庆 163712)
牛顿环实验的MATLAB仿真
崔海瑛,吴春梅,赵大伟,王馨玉
(大庆师范学院 机电工程学院,黑龙江 大庆 163712)
摘要:仿真实验是现代实验技术发展的一个重要方向,也是对实验教学的一个重要补充。利用MATLAB强大的功能技术,可以实现牛顿环干涉实验的仿真。实验仿真过程直观、动态,实现了仿真实验与实验内容、实验原理、实验操作视频相连接,并展现了不同曲率半径对牛顿环实验干涉图像的影响,以及入射光波长对干涉图像的影响,实验仿真效果良好,为科研和教学提供了新的研究方法。
关键词:牛顿环;仿真;MATLAB;
0引言
在高等院校的大学物理实验教学中,牛顿环实验是光学干涉理论中很重要的一部分。而大学物理实验教学通常受场地、实验设备的限制,阻碍其发挥应有的教学作用,所以,人们渐渐把视线转向仿真实验[1-4]。随着计算机技术的不断发展,仿真实验在科学研究和军事生活中发挥着越来越重要的作用[5-7]。对于牛顿环实验来说,实验环境要求较高,仪器调节耗时,眼睛容易疲劳,操作误差较大,入射光单一,牛顿环仪器固定,透镜曲率半径不可调节,不利于观察不同参数对牛顿环干涉图像的影响。本文根据牛顿环干涉理论知识[8-9],利用MATLAB技术,动态仿真了牛顿环干涉实验,仿真实验界面设计直观、形象,便于分析不同参量对牛顿环干涉实验的影响,为科学研究和教学提供了新的研究方法。
1牛顿环实验原理
牛顿环仪器主要由一个平凸透镜和一个平玻璃板组成。在平凸透镜和玻璃板之间形成以接触点O点为中心的空气薄膜,设透镜的曲率半径为R,离接触点O任意一个距离r处的空气膜厚度d,如图1所示。
可得:R2=(R-d)2+r2=R2-2Rd+d2+r2。
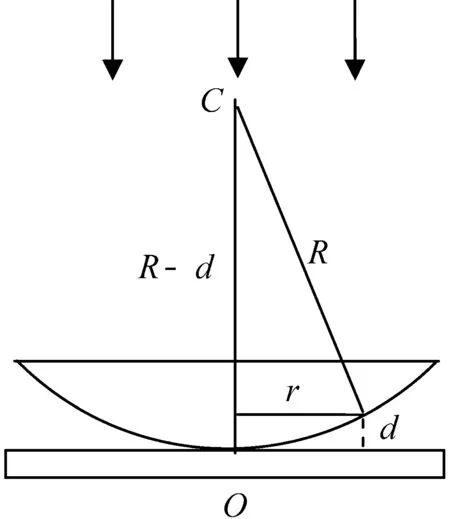
图1 牛顿环干涉实验光路图
因R>>r,故略去d2项而得
(1)
当光线垂直入射时,入射光波长为λ,由空气膜上、下表面反射光所产生的光程差为:
(2)

将(1)式代入(2)式,得:
(3)
根据相干条件,形成暗纹光程差的条件为:
(4)
则暗纹半径为:
(5)
其中rk为第k级暗纹半径。
相邻两暗纹的半径之差为:
(6)
由公式(4)可以推出,因为有半波损失,所以干涉图像的中心为暗点。由公式(6)可以得到,干涉图像中心点附近,条纹间距较大,越靠近边缘,条纹间距较为密集。暗纹半径与入射光波波长、牛顿环的曲率半径有关,利用MATLAB模拟出不同牛顿环曲率半径下,干涉条纹半径大小变化曲线对比图,如图2所示。由此,我们可以看出,当牛顿环曲率半径变大时,干涉条纹半径增大,条纹半径增大的幅度随着干涉级次的增加而增大。
2实验仿真设计
2.1 界面设计

图3 牛顿环干涉实验仿真主界面设计 图4 牛顿环干涉图像界面设计
牛顿环实验仿真主界面设计,如图3所示,主要包含实验原理,实验目的,实验室所用到的实验仪器,实验注意事项,实验模拟等按钮,主界面与这些按钮相连接,实现仿真实验与实验原理、实验目的等等衔接在一起,点击相应按钮,就会进入相应的界面。
实验模拟按钮连接实验模拟界面,点击实验模拟按钮,进入实验模拟界面,如图4所示。其中,牛顿环中透镜曲率半径的取值范围是0.5m-3 m,入射波长的取值范围为390nm-632.8nm,这样设计便于观察曲率半径及入射波长对干涉图像的影响。
2.2曲率半径对牛顿环干涉的影响
入射光波长选为632.6nm的红光,当曲率半径为1m时,干涉图像如图5所示,当曲率半径为3m时,入射光波波长不变,仿真结果如图6所示。可以明显地观测到,当入射光波长不变时,牛顿环曲率半径增大时,干涉图像条纹间距明显增大。
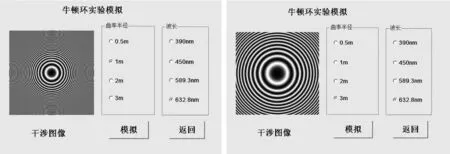
图5 曲率半径为1m时牛顿环干涉图像 图6 曲率半径为3m时牛顿环干涉图像
2.3入射光对牛顿环干涉的影响
曲率半径选为3m,当入射光波长为390nm时,仿真图像如图6所示。当入射光波长为589.3nm时,牛顿环曲率半径不变,仿真结果如图7所示。从图7和图8中可以看出,当入射光波长增大,干涉条纹间距增加,当入射光波长不同时,干涉条纹间距会发生变化。
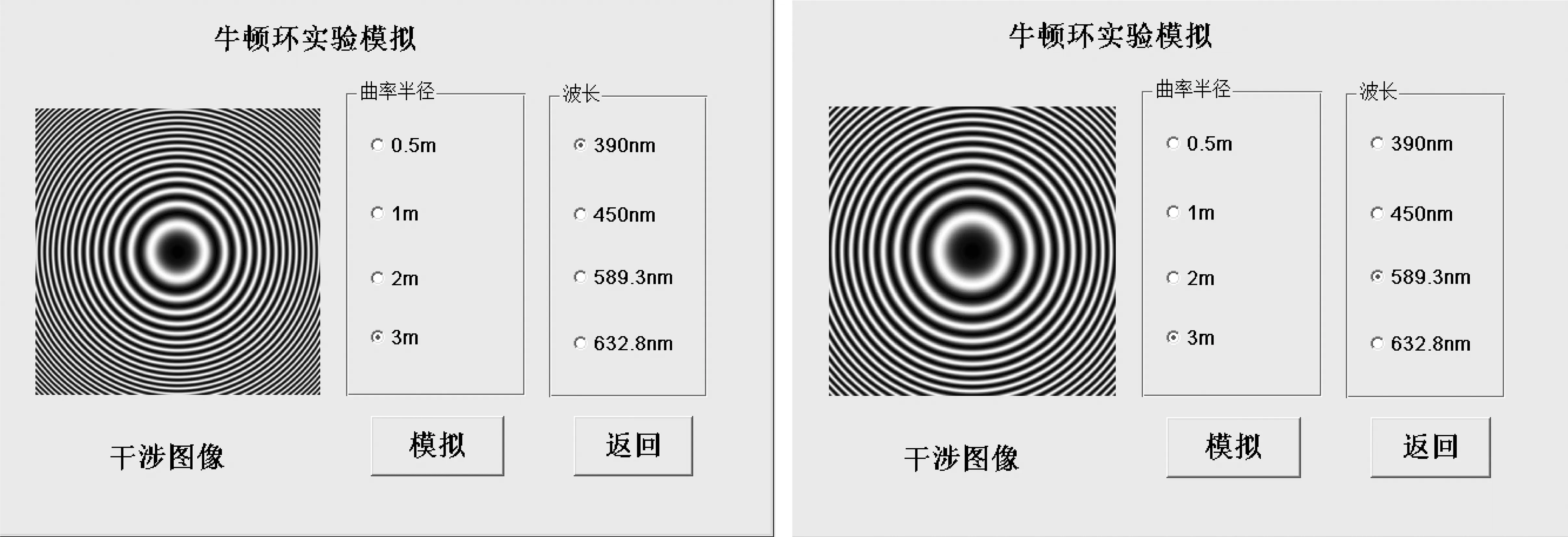
图7 入射光为390nm时牛顿环干涉图像 图8 入射光为589.3nm时牛顿环干涉图像
3结束语
利用MATLAB技术仿真了牛顿环干涉实验,仿真实验实现了实验内容、实验原理、实验目的、实验模拟相互连接,并展示了不同曲率半径对牛顿环干涉图像的影响,以及当入射光波长发生变化时,干涉图像的变化情况。牛顿环仿真实验弥补了传统实验的一些不足,同时拓展了实验内容,丰富了理论知识,对科学研究和教学工作的开展提供了有力的帮助。
[参考文献]
[1] 陈志歆,李斌. 基于Matlab GUI的牛顿环仿真课件制作[J]. 实验科学与技术,2013,11(4):331-333.
[2] 崔海瑛,李玉春,杨瑞,等. 光学虚拟实验系统研究[J]. 光学技术,2012,38(4):447-448.
[3] 张原,张昭,刘蕊. 基于MVC设计模式的虚拟实验平台模块化设计[J]. 计算机工程与科学,2013,35(8):125-129.
[4] 高云霞,高景刚. 基于云计算的高校虚拟实验教学研究[J]. 制造业自动化,2013,35(8):87-90.
[5] 贺正冰,马寿峰,贺国光. 基于仿真实验的城市交通系统宏观现象研究[J]. 物理学报,2010,59(1):171-174.
[6] 李斌,李春洪, 刘苏洋. 探索性仿真实验方法及其军事应用研究现状[J]. 国防科技,2011(1):5-7.
[7] 李平,毛昌杰,徐进. 开展国家级虚拟仿真实验教学中心建设提高高校实验教学信息化水平[J]. 实验室研究与探索,2013,32(11):5-8.
[8] 赵近芳,王登龙. 大学物理学下册[M]. 北京:北京邮电大学出版社,2014:139-140.
[9] 杨述武,赵立竹,沈国土. 普通物理实验:光学部分[M]. 北京:高等教育出版社,2007:60-62.
[责任编辑:崔海瑛]
作者简介:崔海瑛(1983-),女,黑龙江大庆人,讲师,从事光学信息研究。
基金项目:大庆市指导性科技计划项目(szdfy-2015-57)。
中图分类号:O411
文献标识码:A
文章编号:2095-0063(2016)03-0014-03
收稿日期:2016-01-24
DOI 10.13356/j.cnki.jdnu.2095-0063.2016.03.004