一种基于Hpwm-Lpwm的BLDCM转子位置估算方法
2016-07-13马金猛文新宇
马金猛,文新宇
(太原科技大学电子信息工程学院,太原 030024)
一种基于Hpwm-Lpwm的BLDCM转子位置估算方法
马金猛,文新宇
(太原科技大学电子信息工程学院,太原 030024)
摘要:在分析传统反电动势检测原理的基础上,提出一种基于端电压实时计算的永磁无刷直流电机(BLDCM)转子位置估算方法。该方法不需要构造电机中点和端电压深度滤波电路,简化了硬件的结构并减小滤波电路带来的相移。利用实时计算端电压检测出相反电动势过零点,然后延时电角度近似得出实际的换相点。通过分析不导通相续流情况,证明了PWM-ON-PWM和Hpwm-Lpwm调制方式适用于该简化方法,在Matlab/Simulink仿真和PAC522 0Demo板实验平台上验证了该方法的可行性。
关键词:反电动势;无刷直流电机;转子位置;过零点;续流
无刷直流电机具有结构简单、效率高、调速性能好、寿命长、可靠性高等诸多优点,被广泛应用在各个领域。无刷直流电机常利用霍尔位置传感器来帮助换相,而霍尔位置传感器需要安装在电机永磁体背面,对工艺有较高的要求,且传感器信号容易受到外界的干扰,这限制了无刷直流电机的应用范围,因此无刷直流电机无位置传感器控制系统成为研究的热点问题[1-4]。
无位置传感器BLDCM必须检测转子的位置以实现正确换相,目前反电动势法是辨识转子位置最主要的方法[5-8]。无刷直流电机一般不引出中点,在两两导通的方式下,传统的反电动势法通过对不导通相端电压和构造的电机中点进行比较,以此来检测相反电动势过零点。由于反电动势和电感的存在,实际的电机中点和构造的电机中点只在非常特殊的情况下电位相等,且在Hpwm-Lon、Hon-Lpwm等常用的调制方式下,端电压构造的电机中点信号存在跳变的情况。电路一般需要引入滤波电路,将跳变的信号滤为连续的信号,这导致估算出来的反电动势过零点偏离真实的位置。文献[9]在Hon-Lpwm调制方式下提出PWM ON采样方式,对端电压构造的电机中点和端电压进行采样比较得出反电动势过零点。文献[10]是在Hpwm-Lon下对母线电压中点和端电压进行采样比较得出反电动势过零点,二者都有效减小了端电压深度滤波带来的相位移动,得出的结论与本文相似,但是二者的结论都基于不导通相在非换相期间电流为零,但实际上Hon-Lpwm和Hpwm-Lon两种调制方式都使不导通相在非换相期间存在一定的续流,因此对转子的位置估算并不准确。
在假设不导通相无续流情况下,提出利用端电压实时计算来检测不导通相反电动势过零点,研究了不导通相续流对电机中点和端电压的影响,分析了不导通相续流的本质特性,并论证了在PWM-ON-PWM和Hpwm-Lpwm的调制方式下,不导通相在非换相期间无续流,此两种调制方式适合本文提出的简化辨识方法。在Matlab/Simulink和PAC522 0Demo平台下验证了本文方法的正确性。
1BLDCM的数学模型
1.1永磁无刷直流电机电压方程
无刷直流电机定子绕组为Y型接法,图1为BLDCM等效电路及逆变器主电路原理图,图2为理想的反电动势和电流波形,反电动势平顶宽度为120°.通常认为永磁无刷直流电机的三相绕组具有对称性,无刷直流电机电压方程为:
ua=Ldia/dt+Ria+ea+un
ub=Ldib/dt+Rib+eb+un
uc=Ldic/dt+Ric+ec+un
(1)
式(1)中ua、ub、uc为三相端电压,ia、ib、ic为三相定子相电流,ea、eb、ec为三相反电动势,R为定子电阻,L为定子电感,un为电机中点电压。
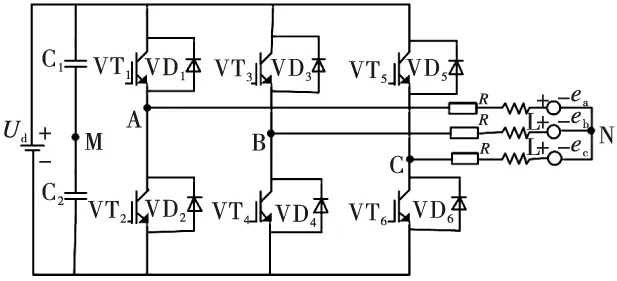
图1 无刷直流电机等效电路及逆变器主电路原理图
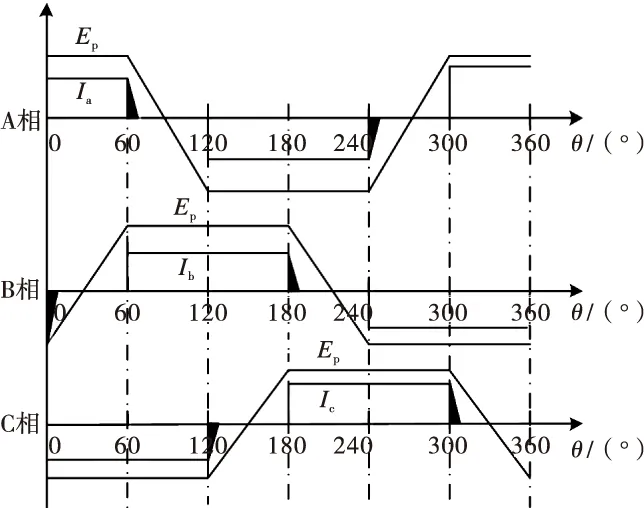
图2 理想的三相反电动势和电流波形
1.2永磁无刷直流电机转矩方程和运动方程
BLDCM电磁功率Pe和电磁转矩Te方程:
Pe=eaia=ebib+ecic
(2)
本文采用三相六态两两导通方式,设Ip为母线总电流,假设不导通相无电流通过,如A、C相导通,B相关断,则存在ia=-ic=Ip,ib=0,ea=-ec=Ep,同时有Ep=keω,ωm=ω/np,由此简化电磁功率和电磁转矩方程:
Pe=2EpIp
(3)
式(3)中np为电机极对数,ωm为机械角速度,ω为电气角速度,ke反电动势系数。
BLDCM运动方程为:
Te-TL=Jdω/dt+Bω
(4)
式(4)中Te为电磁转矩,TL为负载转矩,J为转动惯量,B为阻尼系数。
2反电动势估算转子位置原理
2.1传统反电动势估算转子位置原理
电机两相导通,第三相关断,假设在换相前没有电流续流,以图1电角度(0°,60°)来分析,则有ia=-ic,ib=0,同时有ea=-ec,由式(1)可得:
ub=eb+un
(5)
化简可得:
(6)
eb=un-ub
(7)
由(6)和(7)得:
(8)
当不导通相B相反电动势eb=0时,ub=un,传统方法用不导通相端电压与母线中点或构造的电机中点比较,再延时30°电角度,寻找到换相点,其实质是认为ud/2为电机中点。
传统方法存在的问题分析
上面假设的条件是A、C相导通,B相无续流,由于在PWM调制下,A相和C相会通过续流二极管续流,忽略续流二极管压降,A相和C相电势组合有四情况,分别是ua=ud、uc=0,ua=0、uc=ud,ua=0、uc=0和ua=ud、uc=ud,令ua=ud用ua=1表示,其它同理,即由(6)得出:
(9)
由(9)可知,un电机中点电压并不总是母线电压ud的一半,不同的PWM调制方式会出现上面多种情况的组合,以Hpwm-Lon为例,仍在电角度(0°,60°)下分析,假设不导通相B相无电流续流,当VT1=1高电平,VT6=1高电平时,可知ua=ud、uc=0,即有ud=(ua+uc)/2=ud/2,当上桥PWM由1跳变到0时,VT1=0、VT6=1,此时电路续流环路是A相线圈-C相线圈-VT6-VT2-A相线圈,可知ua=0、uc=0,即有un=0.令电气周期为T可得:
eb=12Ept/T-Ep
(10)
由(5)、(9)和(10)式可得:
(11)
由(11)可知,B相在不导通时,B相电势是一个跳变的信号,当eb=0,即当t=T/12时,ub可能为ud/2,也有可能为0,由于B相电势是一个斜坡信号和一个方波信号的叠加,不具有单调性,不便于AD采样,反电动势过零信号也极容易误触发,所以传统方法需要引入深度滤波电路,目的是将连续跳变的信号转化为连续单调的信号,但深度滤波电路的引入给信号带来较大的相移,导致转子估算偏移真实值。式(11)的前提条件是B相无电流续流,根据2.3节的分析可知,在Hpwm-Lon的调制方式下,实际的情况是B相不导通相前有续流,(30°,60°)无续流,无续流才满足式(11).
2.2简化反电动势估算转子位置原理
由式(1)化简得:
(12)
用uab减ubc得:
uab-ubc=Ld(ia+ic-2ib)/dt+
R(ia+ic-2ib)+(ea+ec-2eb)
(13)
根据基尔霍夫电流定律可知ia+ic+ib=0,假设A、C相导通,按照反电动势平顶宽度为理想120°分析,在电角度(0°,60°)期间,ea=-ec,由(13)进一步化简得:
(14)
为了进一步简化计算,只要B相在不导通时无电流续流,ib=0则有:
eb=(ubc-uad)/2
(15)
有一种特殊情况,当ua+uc=ud时,进一步有:
(16)
从(15)可以看出,反电动势过零点仅和线电压有关,同理在A或C相不导通时有:
(17)
在特殊情况下,当ub+uc=ud或ua+ub=ud时:
(18)
从上面的结论可以看出,只需要实时计算线电压便可以找到相反电动势过零点。特殊情况下只需要计算不导通相端电压,但前提是不导通相无电流续流且两导通相端电压之和为母线电压。
2.3不导通相续流特性分析

结论一:忽略续流二极管两端压降,当导通的两相电势都为零(GND)时,不导通相产生的相反电动势决定不导通相是否续流,当反电动势小于零时,有正电流续流,反之无电流续流。
结论二:忽略续流二极管两端压降,当导通的两相电势都为母线电压时,不导通相产生的相反电动势决定不导通相是否续流,当反电动势小于零时,无电流续流,反之有负电流续流。
将Hpwm-Lon调制方式中反电动势小于0,包括(0°,30°)、(90°,120°)、(120°,150°)、(210°,240°)、(240°,270°)和(330°,360°)这六个有正电流续流区域换成Hon-Lpwm,这便是PWM-ON-PWM调制方式,最终不导通相在非换相区域无电流续流。
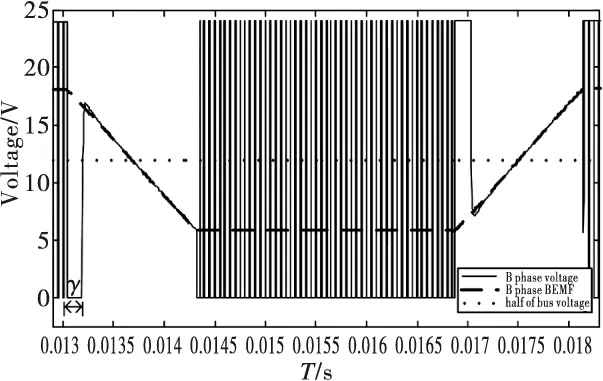
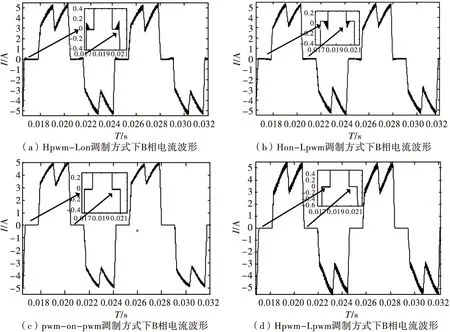
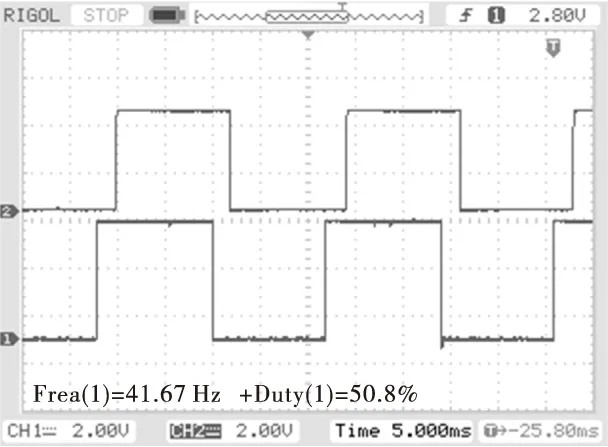
Pe=2EpIp (19) 结论三:在Hpwm-Lpwm调制方式下,当母线上有持续电流时,电机中点电位维持在ud/2,此时不导通相在非换相区间无续流。 综上所述,总结出非导通相无电流续流的两种调制方案,方案一:PWM-ON-PWM方式,但由于PWM-ON-PWM需要精确计算相反电动势过零点和换相点,较为复杂,因而并不常用。方案二:Hpwm-Lpwm调制方式较为简单,便于实现。 3仿真分析 基于以上理论分析,利用Matlab/Simulink仿真工具搭建永磁无刷直流电机无位置传感器的控制系统进行转子位置估算。系统主要参数:定子电阻0.3 Ω,定子相电感0.375 mH,反电动势系数ke为0.029 76 V/(rad·s-1),反电动势平顶宽度120°,转动惯量J为1.2×10-5kg·m2,阻尼系数B为0.001 2 N·m/(rad·s-1),母线电压ud为24 V,负载转矩为0 N·m,转速设定为2 000 r/min,极对数为4,仿真步长0.1 s,三角载波频率为20 kHz,速度环采用离散的PI控制器,采样时间为一个载波周期0.000 05 s. 图3 Hpwm-Lon B相电压 图4 B相电压、反电动势和二分之一母线电压的波形 图5(c)、图5(d)分别是PWM-ON-PWM和Hpwm-Lpwm下的B相电流,从图中放大区域可以看出,B相不导通时无电流续流,与理论分析一致。 图5 不同调制方式下的B相电流 图6 B相电压与过零点信号波形 4实验结果分析 实验用技领半导体公司PAC5220Demo板构建实验平台,PAC5220为电源应用控制器,其内部包括多模式电源管理器、可配置模拟前端和特殊应用高压驱动器,处理器内部集成了高侧和低测驱动器,并且内部集成了专用的过流保护电路,这些可有效减小系统尺寸,大大降低成本。实验所用的永磁无刷直流电机型号为57BL55S06-230TF0,额定电压24(V),额定电流2.5(A),额定功率60(W),额定转速3000(RPM),额定转矩0.15(N·m). 图7 过零点信号与实际霍尔信号波形 图6为B相电压(通道2)、反电动势过零信号(通道1)波形,可以看出在B相不导通期间,B相电压具有单调性,反电动势过零信号经软件滤波后得出。图7为反电动势过零信号(通道1)和真实的霍尔信号(通道2),经测量,反电动势过零信号超前真实霍尔信号2 ms,电气频率为42 Hz,得出反电动势过零信号超前真实霍尔信号30.24°电角度,相位移动很小。 5结论 提出一种利用端电压的实时计算来辨识永磁无刷直流电机转子位置的简化方法,通过理论分析得出该方法的使用条件:不导通相无续流现象。此外还在此基础上指出一种特殊情况,其使用条件:不导通相无续流现象且导通相的端电压之和为母线电压。仿真和试验证明Hpwm-Lpwm调制方式适合本文提出的方法,本文还分析了不导通相续流的本质特性,总结出三条基本的结论,这为进一步改进调制方法,抑制转矩脉动提供理论依据。 参考文献: [1]李志强,夏长亮,陈炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010(7):38-44. [2]史婷娜,吴曙光,方攸同,等.无位置传感器永磁无刷直流电机的起动控制研究[J].中国电机工程学报,2009(6):111-116. [3]邹继斌,江善林,张洪亮.一种新型的无位置传感器无刷直流电机转子位置检测方法[J].电工技术学报,2009(4):48-53. [4]董富红,沈艳霞,纪志成.永磁无刷直流电机无位置传感器估计方法综述[J].微电机(伺服技术),2003(5):39-46. [5]李自成,程善美,秦忆.线反电动势检测无刷直流电机转子位置方法[J].电机与控制学报,2010(12):96-100. [6]李自成,程善美,蔡凯,等.反电动势过零检测无刷直流电机转子位置新方法[J].电工技术学报,2009(7):52-58. [7]崔臣君,刘刚,郑世强.基于线反电动势的高速磁悬浮无刷直流电机无位置换相策略[J].电工技术学报,2014(9):119-128. [8]王思远.无刷直流电动机的反电动势换相及起动方法的研究[D].哈尔滨工业大学,2006. [9]孙旭霞,胡少一,高沁源.基于PWM ON反电势检测法的BLDCM控制系统设计[J].微特电机,2015(8):77-80. [10]林明耀,周谷庆,刘文勇.基于直接反电动势法的无刷直流电机准确换相新方法[J].东南大学学报:自然科学版,2010(1):89-94. [11]CHEN C H,CHENG M Y.A new cost effective sensorless communication method for brushless DC motors without phase shift citcuit and neutral voltage[J].IEEE Transactions on Power Electronnics,2007,22(2):644-653. [12]ZICHENG LI,SHANMEI CHENG,YI QIN,et al.A novel line-to-line back EMF calculation for sensorless brushless DC motor drives[C]∥Proceedings of the 11th international Conference on Electrical Machines and Systems.ICEMS,2008:1406-1411. A Method of BLDCM Rotor Position Estimation Based on Hpwm - Lpwm MA Jin-meng,WEN Xin-yu (Electronic and Information Engineering Institute,Taiyuan University of Science and Technology,Taiyuan 030024,China) Abstract:On the basis of analyzing principle of traditional back electromotive force detection,a method of permanent magnet BLDCM rotor position estimation is proposed by real-time calculation of terminal voltage.This method needs not construct machine neutral and depth filter circuit of terminal voltage so as to simplify the hardware structure and reduce the phase shift caused by filter circuit.Detecting phase back EMF zero-crossing through?real-time?calculation?of terminal voltage,the actual commutation point can be obtained by delaying electric angle approximately.After analyzing the non-conducting phase freewheeling current situation,it shows that the PWM-ON-PWM and Hpwm-Lpwm modulation methods are applicable to this simplified method.Simulation on the Matlab/Simulink and experiment on PAC5220Demo platform verified the feasibility of the proposed method. Key words:back EMF,BLDCM,rotor position,zero-crossing,free-wheeling current 收稿日期:2015-10-09 基金项目:国家自然科学基金(61203049);太原科技大学校博士启动资金(20122048);山西省高校科技研究开发项目(20121068) 作者简介:马金猛(1989-),男,硕士研究生,主要研究方向为无位置传感器永磁无刷直流电机控制;通讯作者:文新宇,副教授,E-mail:wxysunrain@163.com 文章编号:1673-2057(2016)04-0260-07 中图分类号:TM381 文献标志码:A doi:10.3969/j.issn.1673-2057.2016.04.003