快速倾斜镜校正系统在天文仪器中的应用研究∗
2016-06-27高鹏飞胡中文戴松新
高鹏飞胡中文 戴松新
(1中国科学院国家天文台/南京天文光学技术研究所南京210042)
(2中国科学院天文光学技术重点实验室南京210042)
(3中国科学院大学北京100049)
快速倾斜镜校正系统在天文仪器中的应用研究∗
高鹏飞1,2,3†胡中文1,2戴松新1,2
(1中国科学院国家天文台/南京天文光学技术研究所南京210042)
(2中国科学院天文光学技术重点实验室南京210042)
(3中国科学院大学北京100049)
在天文望远镜系统中,通过在望远镜内部增加一套图像跟踪、校正系统,降低大气湍流低频扰动和望远镜跟踪误差对天文观测产生的影响,从而保证光路稳定,提高系统通光量和观测效率.系统工作时由CCD相机将星象的图像信号发送给控制计算机,控制计算机通过软件算法计算出实时图像与参考图像中的星斑中心偏移量,并反馈给快速倾斜镜控制器,从而控制倾斜镜快速摆动,实现光学校正过程.该系统目前已运行在国家天文台2.16 m望远镜中,实际运行的测试数据表明,在曝光25 ms情况下,校正平均频率为15 Hz,系统基本可以消除望远镜跟踪误差的影响,大气湍流的扰动影响有一定改善,观测效率提高了约15%.
大气扰动,望远镜,技术:图像处理,方法:观测,方法:数据分析
1 引言
快速倾斜镜系统是一种作为光源目标和接收器之间快速精确控制光束方向的反射镜装置,利用分辨率达纳米级的压电驱动器或音圈电机驱动反射镜,能使光束产生快速、小角度的偏转变化.与传统的电机驱动机构相比,快速倾斜镜具有运动惯性小、响应速度快、角分辨率精度高的显著优点,在天文望远镜、激光通讯、激光武器、图像稳定系统和自适应光学系统等精密跟踪光束控制领域有广泛应用[1−2].近些年,在现代天文仪器领域中,快速倾斜镜理论研究日趋成熟,实际应用也越来越多,在国外的麦哲伦巨型望远镜(GMT)次镜中的超大型拼接式快速倾斜镜系统、红外光学望远镜阵列(IOTA)跟星系统、4.2 m的威廉·赫歇耳望远镜(WHT)激光导星系统、30 m望远镜(TMT)的窄视场红外自适应光学系统,以及国内兴隆观测站的2.16 m望远镜和建设中的中国SONG(Stellar Observations Network Group)望远镜等众多天文望远镜中,该系统都得到了应用.在天文观测中,由于大气湍流扰动和望远镜跟踪误差的影响,使得观测目标能量不集中,影响观测效果[3–6],所以需要增加图像跟踪、校正系统来保持光路稳定,提高系统通光量,改善观测效率.针对这一问题,本文主要研究和介绍了快速倾斜镜校正系统在国内2.16 m望远镜中的初步应用情况.
2 系统组成及其工作原理
2.1 系统硬件组成
图1为快速倾斜镜校正系统构成图,系统主要由3大部分组成:CCD相机、控制计算机、Tip-tilt倾斜镜(倾斜镜通过定制镜架固定在Tip-tilt偏摆平台上,工作时倾斜镜随着Tip-tilt偏摆平台快速倾斜、摆动,两者简称Tip-tilt倾斜镜)及其控制器.鉴于实际观测需求,CCD相机需满足图像采集高帧率、高分辨率及快速、长距传输的条件,本系统选用了德国AVT公司生产的一款高帧率、VGA(Video Graphics Array)分辨率、高性能的千兆网接口机器视觉工业数字摄像机GE680.该CCD相机可以提供最高205帧的、尺寸为640 pixel×480 pixel的灰度图像,且支持长距离网络信号传输.系统中的偏摆平台及其控制器选用了德国PI公司的压电偏摆镜系统,该压电陶瓷偏摆平台拥有20 nrad的分辨率、亚毫秒级的响应速度,并且具有较好的线性特性和稳定性.在工作状态下,可以实现两维坐标轴(相互垂直)的独立摆动,闭环下摆动角度范围为0–2 mrad,开环时为0–3.5 mrad.
2.2 系统工作原理
天文望远镜在观测天体目标时,光路中的一部分光被CCD相机获取,用于采集实时的星象图像.采集的图像经以太网通信传输至控制计算机,控制软件即获取到图像.观测人员在观测过程中首先需要通过控制调整天文望远镜,使被观测天体目标光斑恰巧落在光瞳中心位置,保存此时的图像作为参考图像.在校正系统工作过程中,控制软件通过实时算法计算出后续实时图像与参考图像的星斑中心偏移量,进而得出Tip-tilt控制器控制量,最终控制Tip-tilt倾斜镜快速摆动,使星象的光斑中心始终稳定在参考点附近,即光斑始终落在光瞳中央,达到稳定光路、提高光学质量和观测效率的目的.另外,由于Tip-tilt倾斜镜的摆动范围有限,当观测目标超出校正范围时,仍需观测人员通过控制调整天文望远镜重新对准被观测天体,重复上述过程实现校正.
3 软件及算法设计
3.1 软件功能及其原理流程图
软件及算法设计是本系统的核心部分,系统软件程序基于MFC的C/C++语言编写,编写平台为Visual Studio 2010,软件界面为对话框模式.
软件程序主要包含CCD相机参数设置、硬件初始化、图像采集、降噪处理、图像星斑中心定位算法、Tip-tilt控制器控制等功能部分.其中参数设置部分可以对CCD相机的曝光时间、增益值以及Binning模式选择(该模式通过合并像素改变图像分辨率,实现不同解析度图像的输出)进行设置.软件工作时,一方面观测人员需要通过软件完成快速倾斜镜校正系统的各项操作,如:参数设置、选择参考图像、校正开始与停止等功能,完成校正过程;另一方面软件后台完成对CCD相机的参数设定、图像读取、保存、显示,对Tip-tilt控制器的控制和倾斜镜摆动位置数据的读取、反馈,同时完成CCD图像的降噪处理、图像目标定位算法等功能.图2是系统软件程序流程图.
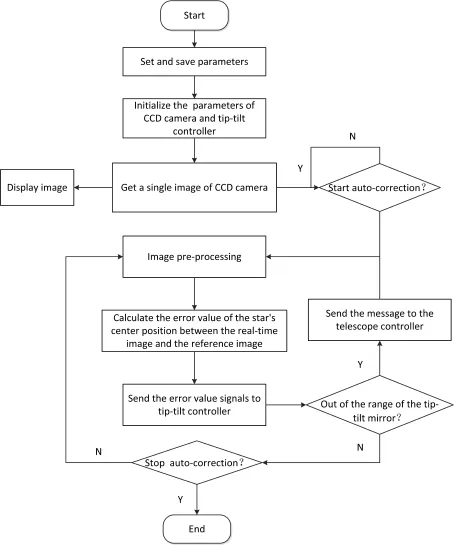
图2 程序流程图Fig.2 The fl ow diagram of procedure
3.2 软件图像目标定位算法及图像降噪处理
系统实现校正过程需要计算出采集的实时图像与参考图像的星斑中心偏移量,因而需要进一步通过程序算法计算出每一帧图像星斑中心坐标.常用的图像目标定位算法有归一化相位相关法、重心法、Hough变换法、高斯拟合法及圆拟合法等,归一化相位相关法和重心法具有更高的精度和抗噪稳定性,可以更好地满足本系统对图像处理的算法要求.对比归一化相位相关法和重心法两种算法,虽然重心法计算精度略差于归一化相位相关法,但是重心法的计算速度更快[7−8],在精度要求相对可以忽略的情况下,重心法更符合本系统对速度的要求.传统重心法的原理是以图像灰度为权值的加权型方法,假设图像尺寸为M×N,则星斑中心的计算公式为:
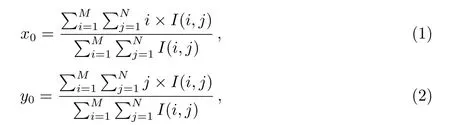
(1)–(2)式中I(i,j)代表图像中第i行第j列像素点的灰度值.上述重心法计算一幅M行N列的图像时,求出星斑中心(x0,y0)需要进行2×2×M×N次计算.但是在实际图像中,星斑部分只占了图像的小部分区域,大部分的计算都是无用的非星斑区,显然传统重心算法存在冗余的计算量,与系统对速度的要求相悖.改进的算法是,首先遍历图像寻找图像中的灰度值最大值点(在对图像进行滤波降噪处理以后,图像中灰度值最大值点为星斑中的点),然后基于该点选取一个K×K的窗口区(根据实际观测情况,K取8),最后在该窗口区中运用重心法求出星斑中心(x0,y0),改进的重心法计算量为M×N+4K2.当K=8,且M、N较大为几百时,可以看到,M×N+4K2?4×M×N,显然,改进的重心法计算量远小于传统重心法.另外,由于改进的重心法计算的只有窗口部分的像素点,这将同时滤除掉图像其他部分噪声对于重心法计算精度的影响,提高了计算精度.
因为图像采集总会受到CCD的热噪声、读出噪声、A/D转换噪声、量化噪声的干扰[9],星象图像中夹杂着各种噪声,尤其是在观测暗星时,图像的信噪比更低,这极大地影响了上述图像星斑中心定位算法的计算.因此,在进行图像目标定位算法之前还需要进行图像滤波、降噪处理.分析实际采集的星象图像,发现图像中包含着大量椒盐噪声,有些噪点亮度甚至大于星斑部分像素点亮度,这些噪声将影响改进的重心法对星斑中心位置的粗定位和计算精度,因而需要采用中值滤波消除掉图像中的椒盐噪声[10].
4 测量实验与结果
将该系统应用到2.16 m望远镜后,通过对天体目标的观测,进行校正效果对比实验.实验数据分为两组,一组为关闭快速倾斜镜校正系统情况下程序算法计算出的图像星斑中心坐标值,另一组为开启校正系统情况下的数据,每采集一帧CCD相机图像,程序将记录一次坐标值.实验期间,观测目标、曝光参数等条件不变,数据为连续时间采集,由于时间相对较短(分别为10 min),气候变化产生的影响忽略不计.实验中,人工选取一幅星斑进入光瞳位置较好的位置图像作为参考图像,程序计算出其星斑中心坐标为(26.49, 29.16)(单位:pixel),该坐标将作为分析校正效果的参考坐标.
图3中两幅图分别为关闭和开启校正系统两种情况下星斑中心坐标在一段时间内的分布图,其中,CCD曝光时间为25 ms,被观测天体为5.3 mag星,数据样本量为10000左右,左右两幅图比例尺完全相同.可以看到,在不开启校正系统情况下,左图中大部分星斑围绕在参考点附近小幅度随机分布,还有一部分大幅度远离参考点的扰动星斑分布在右侧,前者为大气扰动因素造成,后者为望远镜振动以及跟踪误差因素引起.开启校正系统后,右图中大幅度远离参考点的扰动星斑消失,且围绕参考点的小幅度星斑分布范围变得更小.进一步进行重复实验,结果一致.上述实验结果说明,由望远镜振动及跟踪误差产生的误差在使用校正系统后基本可以消除,而大气扰动产生的星斑误差影响也有一定改善.
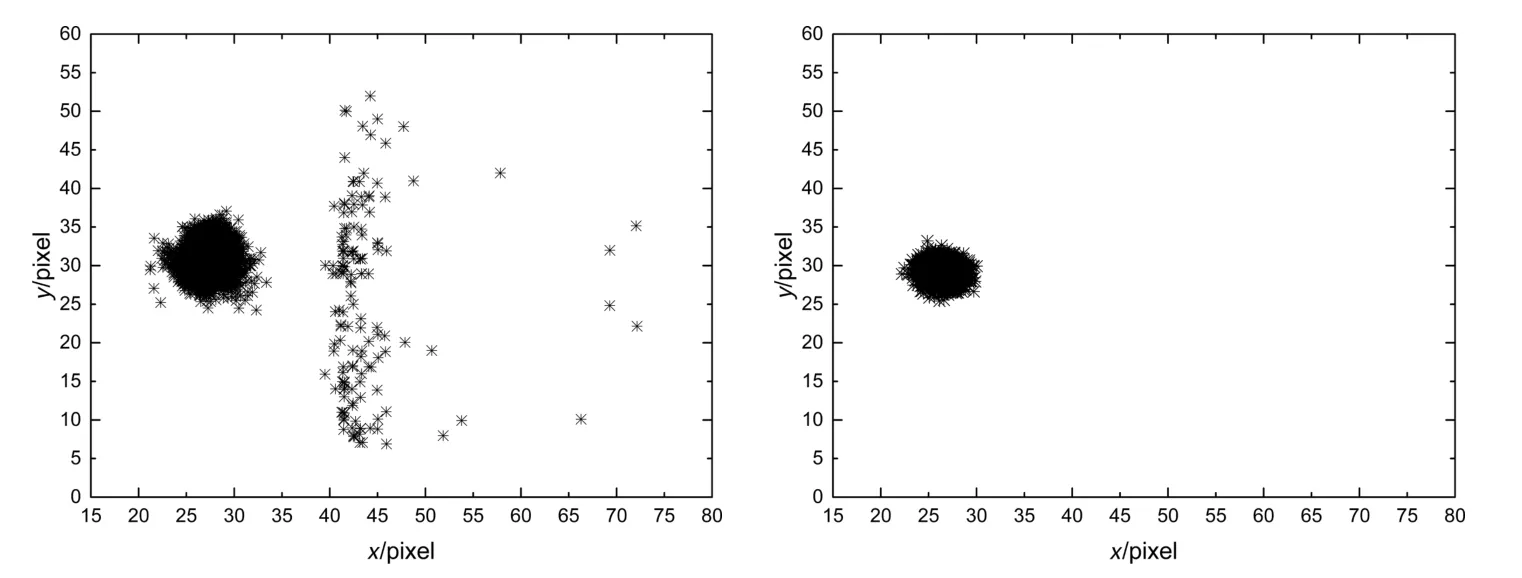
图3 星斑中心x、y轴坐标在一定时间段内的变化分布图.左图为关闭快速倾斜镜校正系统,右图为开启校正系统.Fig.3 The variations of the stellar centroid positions x and y with correction(right)and without correction(left)
将采集的星斑坐标数据进一步做一维坐标轴分析.由图4、图5可以看到,左侧不开启校正系统时,x、y轴坐标分布曲线既包含高频抖动还包括周期性的大幅振动,开启校正系统后,曲线虽然围绕参考坐标仍有高频的抖动,但周期性的大幅振动已经消失.x轴起伏范围缩小了50%,y轴范围缩小了69%,进一步印证了上述实验分析结论.
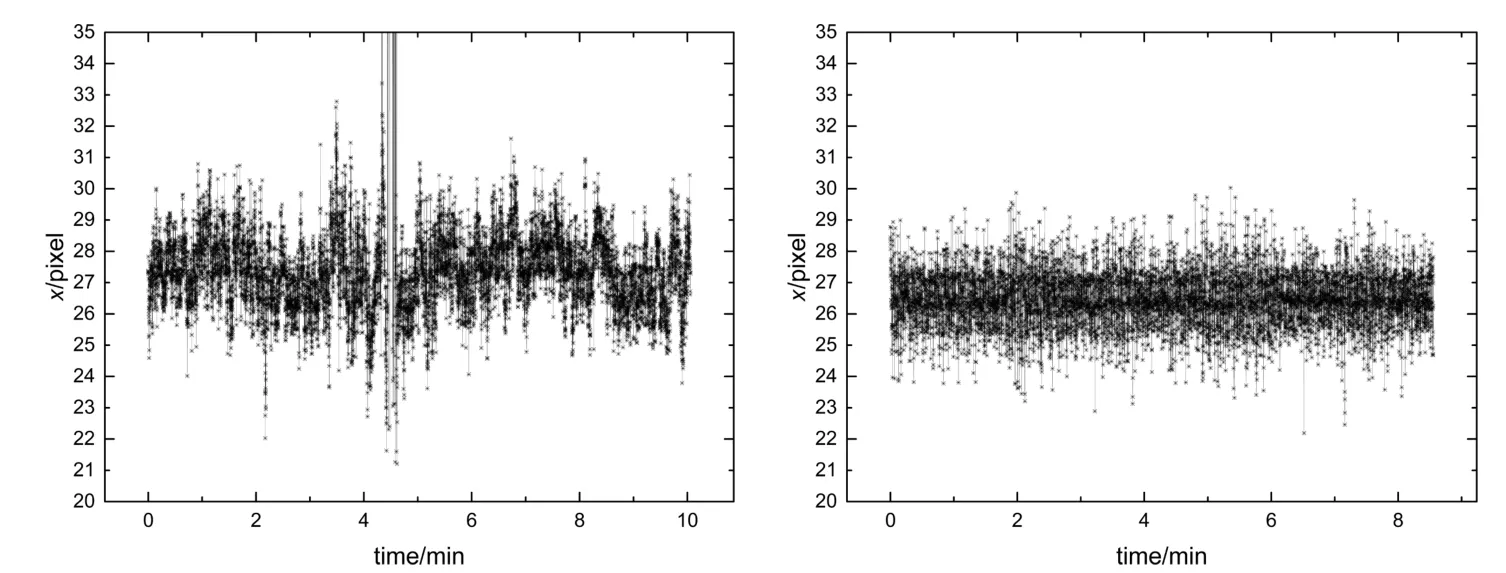
图4 星斑中心的x轴坐标随时间变化的曲线.左图为关闭快速倾斜镜校正系统,右图为开启校正系统.Fig.4 Temporal variation of the stellar centroid position x with correction(right)and without correction(left)
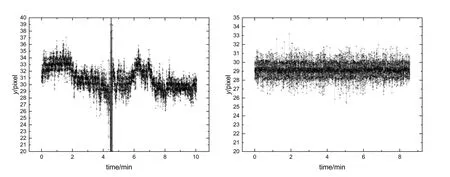
图5 星斑中心的y轴坐标随时间变化的曲线.左图为关闭快速倾斜镜校正系统,右图为开启校正系统.Fig.5 Temporal variation of the stellar centroid position y with correction(right)and without correction(left)
将坐标数据进一步按坐标位置做出概率分布直方图,如图6–7可以看到,望远镜振动和跟踪误差因素引起的大幅度误差是小概率误差,开启校正系统后,该误差消失,并且出现概率在10%以上的星斑分布范围明显缩小,较参考点坐标(26.49,29.16)误差缩小了1 pixel左右.这同样印证了前述实验分析结论,校正系统使得光路更加稳定,系统通光量更高.
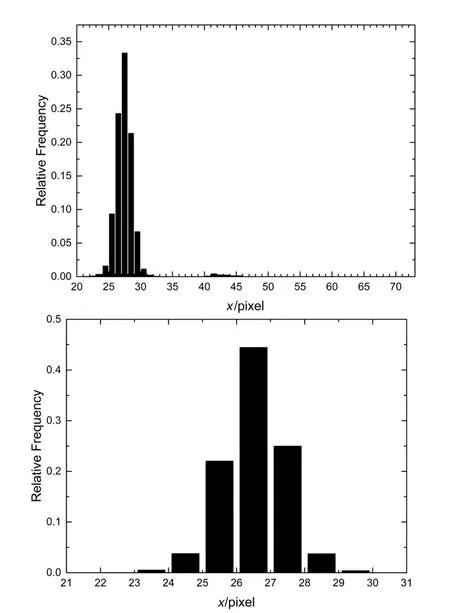
图6 星斑中心的x轴坐标概率分布直方图.上图为关闭快速倾斜镜校正系统,下图为开启校正系统.Fig.6 The probability distribution of the stellar centroid position x with correction(bottom)and without correction(top)of the fast-steering mirror
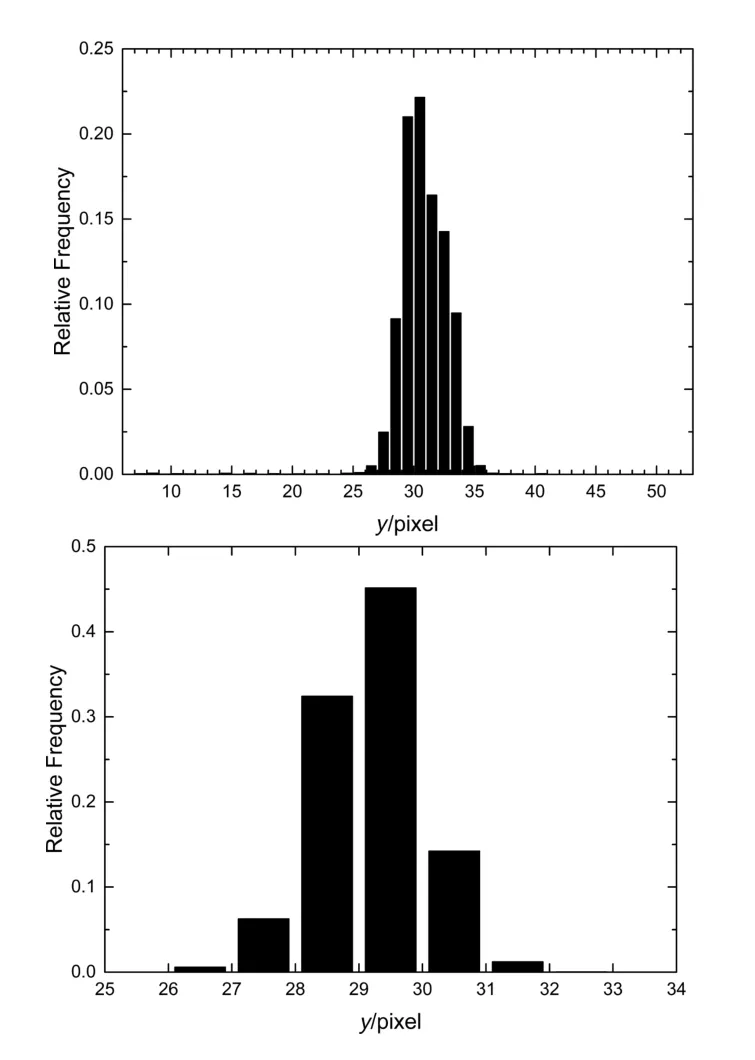
图7 星斑中心的y轴坐标概率分布直方图.上图为关闭快速倾斜镜校正系统,下图为开启校正系统.Fig.7 The probability distribution of the stellar centroid position y with correction(bottom)and without correction(top)of the fast-steering mirror
另外,根据实验期间收集的通光量观测数据,校正前后观测效率提高了约15%,进一步说明了该校正系统的校正作用.
5 结论
本文对快速倾斜镜校正系统在兴隆2.16 m望远镜的应用做了介绍和分析,实验结果表明,目前的校正系统对望远镜振动和跟踪误差有消除作用,对大气扰动影响有一定改善.根据观测中校正前后通光量的数据对比,观测效率提高了约15%,但是由于目前系统校正频率较低,仍需要改进系统,提高校正频率,进一步消除大气扰动对观测的影响.
[1]徐飞飞,纪明,赵创社.应用光学,2010,31:847
[2]李新阳,凌宁,陈东红,等.强激光与粒子束,1999,11:31
[3]Skvarc J,Tulloch J.SPIE Proceedings,2008,7015:70154B
[4]Wang L Q,Ellerbroek B,Veran J P,et al.SPIE Proceedings,2008,7015:70155X
[5]徐新行,杨洪波,王兵,等.激光与红外,2013,43:1095
[6]汪红熳,傅承毓.光电工程,1998,25:112
[7]王丽丽,胡中文,季杭馨.天文学报,2012,53:441
[8]Wang L L,Hu Z W,Ji H X.ChA&A,2013,37:230
[9]戴得德,孙华燕,宋丰华.计算机应用,2009,29:60
[10]邢藏菊,曲延锋,徐健,等.电子与信息学报,2002,24:1912
Study on the Application of Fast-steering Mirror in Astronomical Instruments
GAO Peng-fei1,2,3HU Zhong-wen1,2DAI Song-xin1,2
(1 National Astronomical Observatories/Nanjing Institute of Astronomical Optics&Technology, Chinese Academy of Sciences,Nanjing 210042)
(2 Key Laboratory of Astronomical Optics&Technology,Nanjing Institute of Astronomical Optics& Technology,Chinese Academy of Sciences,Nanjing 210042)
(3 University of Chinese Academy of Sciences,Beijing 100049)
For astronomical telescopes,an image tracking and correction system is designed to correct the image motion caused by the atmosphere and by imperfect telescope tracking so as to keep the optical path stable,ensure high optical throughput, and improve astronomical observation.When the system is working,the images taken with the CCD camera are sent to the control computer.The software algorithms of the control computer calculate the error value of the star’s centroid position between the real-time image and the reference image.Then a control signal is generated for the Tip/tilt mirror to correct the stellar target positioning error.This system has been installed at the 2.16 mtelescope of National Astronomical Observatories of China. The experimental results show that the correcting frequency of this system is about 15 Hz when the exposure time is 25 ms.This system can almost eliminate the effect of telescope tracking error,and has some improvement on the impact of low-frequency atmospheric disturbance.The observational efficiency is increased by about 15%.
atmospheric effects,telescopes,techniques:image processing,methods: observational,methods:data analysis
P111;
:A
10.15940/j.cnki.0001-5245.2016.03.009
2015-04-14收到原稿,2016-01-24收到修改稿
∗国家自然科学基金项目(11273038)资助
†pfgao@niaot.ac.cn