反正弦法倾角传感器温度补偿研究*
2016-06-24高国伟潘宏生
何 刚,高国伟,潘宏生,郝 嵘
(北京信息科技大学 自动化学院,北京 100101)
反正弦法倾角传感器温度补偿研究*
何刚,高国伟,潘宏生,郝嵘
(北京信息科技大学 自动化学院,北京 100101)
摘要:带有加速度计的倾角传感器的温度补偿一直是影响精度的重要因素,基于反正弦法的温度补偿可以大大提高传感器的精度。设计过程中采用反正弦法计算输出角度数据,温度补偿时的数据用最小二乘法进行分析与处理。实验结果表明:通过反正弦法计算角度已经具有很高的精度;基于反正弦法的温度补偿可以使精度更高。对比实验的结果证明了该方法的有效性和可行性。
关键词:加速度计;反正弦;倾角传感器;温度补偿
0引言
温度补偿一直是影响传感器精度的重要因素之一,相比一般的倾角传感器,带有加速度计的倾角传感器具有更好的性能。
针对上述类型传感器,本文采用反正弦法计算输出角度可以有效提高传感器的测量精度。在此基础上,利用最小二乘法做数据处理和曲线拟合进行温度补偿,将传感器的精度又提升了一个更高的等级[1]。研究结果证明,基于反正弦法的倾角传感器的温度补偿,已经满足了军事领域高精度的标准要求。
1传感器设计
倾角传感器硬件设计以石英挠性加速度计为倾角敏感元件[2,3],通过CS5532实现A/D转换,以ATmega128为MCU控制器,利用SPI接口实现与CS5532的通信,使用ADM2582E实现硬件通信协议的转换。
软件设计采用C语言描述算法,其中,角度计算忽略不可计算项,并把输出电压变换为模数转换器产生的AD值,得到公式
AD=K0sin(θ+θ0)+K1
(1)
由式(1)得倾角计算公式
θ=arcsin C(AD-K1)/K0)-θ0
(2)
2温度补偿设计
基于反正弦法的倾角传感器在温度补偿时,首先求解Kt0,Kt1,θt三个参数,计算过程如下:
1)假设实验获得n个数据点(θ1,AD1),…,(θn,ADn);将这n个数据点拟合在函数AD=Kt0sin(θ+θt)+Kt1附近,使得偏差平方和最小;以第i个点为例,偏差平方和公式为
(3)
2)对式(3)求P关于Kt0,Kt1,θt的一阶、二阶偏导[4],可知满足最小二乘法的定义,同时一阶偏导的解即为符合要求的Kt0,Kt1,θt。根据一阶偏导的方程,可得
(4)
将θt看成常数,对Kt0,Kt1求解,可得到公式
(5)
式中

将Kt0,Kt1带入方程,可得
(6)
应用三角函数变换公式,化简得
F sinθt+G cos θt=0
(7)
式中F,G为可求的通式,且有
(8)
求与温度相关的Kt0,Kt1,θt的曲线时,仍使用最小二乘法,并用曲线y=ax2+bx+c对数据点拟合[5,6],得到如下解
(9)
3温度试验
3.1温度补偿试验
试验内容:测量传感器(1#~8#)、六个温度点(-40,-20,0,20,40,60 ℃)、25个角度点(-10°,-5°,0°,…,110°)、每点500个数据。试验中每个温度点保温2 h以上。通过试验获得60万组数据,数据要经过三步处理,来完成温度补偿。
2)对步骤(1)的结果进行处理,结合式(5)、式(8)获得固定温度下Kt0,Kt1,θt的值。
3)对步骤(2)的所有结果进行处理,结合公式(9)获得每个传感器计算参数的温度补偿特性曲线。
以4#倾角传感器20 ℃时的数据处理为例,表1给出了输入倾角(单位(°))和输出AD值的对应数据。
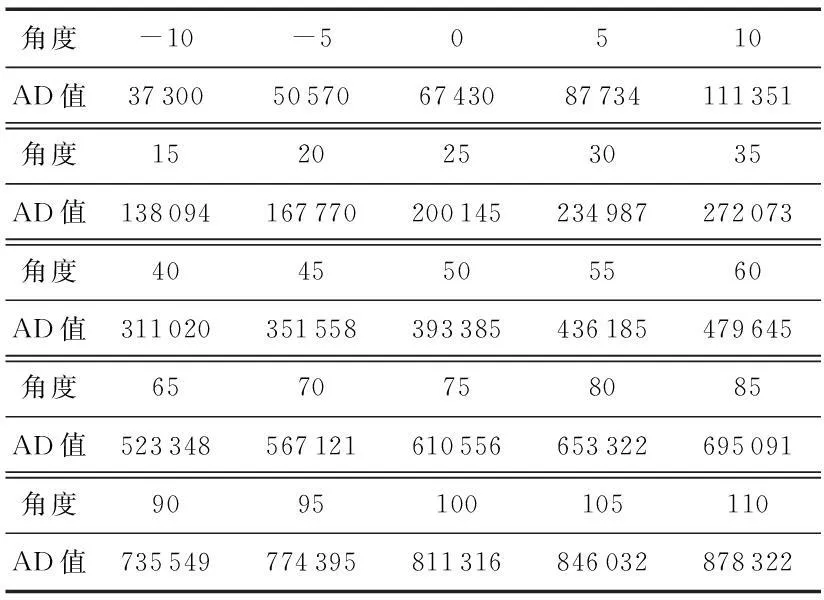
表1 4#倾角传感器20 ℃时角度—AD数据统计表
将表1数据,分别带入F,G求得:F=27 397 730,G=58 403 057;将F,G数据带入式(8),可以求得θt=-64.86 803 854,则Kt0=502 364.352 5,Kt1=522 223.332 2。
将参数Kt0,Kt1,θt带入公式,得
θ=arcsin((AD-Kt1)/Kt0)-θt-ε(θ,t)
(10)
忽略公式中的ε(θ,t)项,取测量倾角与输入倾角的差作为观测量,可得图1。
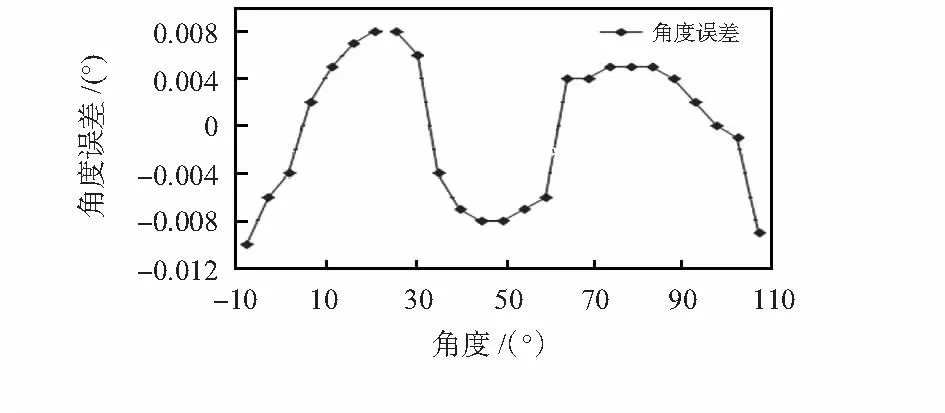
图1 角度误差图Fig 1 Angle error diagram
由图1可知,通过最小二乘法拟合的参数具有极高的精度。
将4#传感器的数据继续处理,取-40,-20,0,20,40,60 ℃温度下的Kt0,Kt1,θt的数值,代入公式(9),可以求得Kt0,Kt1,θt的关于温度的函数如下
(11)
在应用最小二乘法进行曲线拟合过程中,拟合曲线与实测点间会存在误差,因此,以此误差作为观测对象。θt拟合曲线的误差如图2所示,同样,Kt0,Kt1拟合曲线的误差均在允许范围之内。表明了使用最小二乘法求解参数的拟合曲线,具有很高的精度。

图2 θt拟合误差Fig 2 θt fitting error
3.2补偿对比实验
测量1#~8#传感器,测量5个温度点(-30,-10,10,30,50 ℃)和24个角度点(-7.5°,-2.5°,2.5°,…,107.5°,选取能够产生最大误差的点),每点取500个数据[7,8]。测量结束后随机抽取4#和7#,改成分段线性化法的传感器,测量相同的温度点和角度点。试验结果以4#为例进行说明,基于分段线性化法的温度补偿后的误差如图3所示,基于反正弦法的温度补偿后的误差如图4所示。

图3 基于分段线性化法的温度补偿后的误差Fig 3 Error after temperature compensation based on piecewise linearization method
对比图3和图4,可见基于分段线性化法的温度补偿,产生的角度测量误差最大值为0.204°,基于反正弦法的温度补偿产生的误差,最大值为0.027°。7#的试验结果与4#一致。
4结论
本文通过反正弦法计算角度,应用最小二乘法对数据进行处理,具有极高的精度。对比试验表明:2个基于分段线性化法的温度补偿后的最大误差值分别为0.204°,0.187°,8个基于反正弦法的温度补偿后的最大误差值分别为0.029°,0.037°,0.035°,0.027°,0.026°,0.043°,0.033°,0.034°,证明了基于反正弦法的温度补偿,具有较高的精度和很好的一致性。

图4 基于反正弦法的温度补偿后的误差Fig 4 Error after temperature compensation based on arcsine method
参考文献:
[1]高国伟.传感器系列讲座(3)[J].传感器世界,1995(8):29-38.
[2]熊平闯.多个MEMS加速度计融合的数字倾角仪[D].合肥:合肥工业大学,2011.
[3]张鹏飞,龙兴武.石英挠性加速度计误差补偿模型的研究[J].传感技术学报,2006,19(4):1100-1102.
[4]周庆飞,徐明龙.具有温度自补偿功能的高分辨力倾角传感器的设计[J].传感器与微系统,2012,31(1):107-110.
[5]王洪,李磊民,黄玉清.石英挠性加速度计零偏分析与建模方法[J].自动化仪表,2014,35(11):13-16.
[6]于娜,刘志远,赵佳龙.倾角传感器的温度补偿研究[J].传感器与微系统,2014,33(10):14-16.
[7]Shkuratov V,Skvornyuk S P.Multistage angle sensors[J].Mea-surement Techniques,2012,54(11):1239-1241.
[8]Voronin N N,Domrachev V M,Sigachev I P,et al.Determining the errors of an angle digitizer containing a two-phase angle sensor[J].Measurement Techniques,2004,47(6):540-542.
Research on temperature compensation of tilt angle sensor based on arcsine method*
HE Gang,GAO Guo-wei,PAN Hong-sheng,HAO Rong
(School of Automation,Beijing Information Science &Technology University,Beijing 100101,China)
Abstract:Temperature compensation of tilt angle sensor with accelerometer has been an important factor to affect precision,and temperature compensation based on arcsine method can greatly improve precision of sensor.In design process,output angle data is calculated by using arcsine method,and temperature compensation data is analyzed and processed by the least square method.Experimental results show that the arcsine method for angle calculation has high precision,and temperature compensation based on the arcsine method can make precision more higher.The result of comparison experiment proves feasibility and effectiveness of the proposed method.
Key words:accelerometer;arcsine;tilt angle sensor;temperature compensation
DOI:10.13873/J.1000—9787(2016)05—0013—03
收稿日期:2015—08—27
*基金项目:国家自然科学基金资助项目(61271047);北京市属高校创新能力提升计划资助项目(TJSHG201310772026)
中图分类号:TP 212.1
文献标识码:A
文章编号:1000—9787(2016)05—0013—03
作者简介:
何刚(1990-),男,蒙古族,辽宁朝阳人,硕士研究生,主要研究方向为传感技术、检测技术及其自动化装置。