驱动力矩对汽车动力学特征的影响*
2016-06-17王宪彬施树明
王宪彬 施树明
(1.东北林业大学 交通学院, 黑龙江 哈尔滨 150040; 2.吉林大学 交通学院, 吉林 长春 130025)
驱动力矩对汽车动力学特征的影响*
王宪彬1施树明2
(1.东北林业大学 交通学院, 黑龙江 哈尔滨 150040; 2.吉林大学 交通学院, 吉林 长春 130025)
摘要:为分析驱动力矩对汽车系统动力学特征的影响,以魔术公式为基础建立了引入驱动力矩的五自由度(纵向速度、侧向速度、横摆角速度、前轮角速度和后轮角速度)汽车系统平面运动的非线性动力学模型;以后轮驱动系统为例,通过多初值点的相空间分析、单初值点的时域分析及相应轮胎力的分布特征分析,探讨了前轮转角为0时恒定驱动力矩对汽车动力学特征的影响;通过对恒定驱动力矩试验的进一步分析,计算了系统状态变量的分岔图.结果表明:在零转角条件下,随着驱动力矩数值的增大,五自由度汽车动力学系统将发生分岔现象;驱动力矩对汽车的动力学特征存在明显的影响.
关键词:地面车辆;动力学;驱动力矩;相空间分析;分岔分析
以二自由度汽车动力学模型为基础的汽车操纵稳定性研究已经取得了丰硕的成果[1].由于轮胎侧向力的非线性特征使汽车产生转向分岔的动力学失稳机理逐渐被理解和接受[2-5],而二自由度模型假设纵向速度不变,且不考虑轮胎纵向力对系统稳定性的影响[6],因此无法分析驱动力矩对汽车动力学特征的影响.但汽车在行驶过程中,纵向速度越大,轮胎所要提供的地面纵向驱动力越大.轮胎在不同驱动条件下能够提供的侧向力不同,仅以转向角作为分岔参数的转向分岔机理并不能完整解释汽车在驱动和转向联合工况下的动力学分岔特征,也无法解释驱动力矩对操纵稳定性的影响.
近年来广泛应用的汽车系统三自由度(纵向速度、侧向速度和横摆角速度)模型和汽车系统五自由度模型(纵向速度、侧向速度、横摆角速度和前、后车轮角速度)在一定程度上解释了驱动力矩对汽车动力学特征的影响.文献[7-9]分别利用非线性分析方法解释了纵向加速度对稳定性的影响.文献[10-11]分别利用线性和非线性分析方法证明了前驱和后驱汽车的稳定性存在差别.这些研究虽然引入了纵向速度和纵向轮胎力,但驱动作用对汽车动力学特征的影响分析,尤其是前轮零转角输入条件下驱动力矩对汽车动力学特征的影响仍缺乏深入的研究.分析驱动力矩对汽车动力学特征的影响,将加深对汽车转向分岔机理的理解,为汽车动力学集成控制的工程应用提供理论依据.
为此,文中首先建立了引入驱动力矩的五自由度汽车系统平面运动的非线性动力学模型,然后以后轮驱动系统为例,分析了恒定驱动力矩对汽车动力学特征的影响,并计算了系统状态变量随驱动力矩变化的分岔图.
1五自由度汽车系统模型
笔者以三自由度汽车转向系统模型[12]为基础,引入包含驱动力矩的车轮动力学方程,得到五自由度的汽车动力学系统方程[11]:
(1)
式中,m为整车质量,Iz为汽车绕z轴的转动惯量,vx和vy分别为汽车坐标系质心处的纵向速度和侧向速度,ω为汽车横摆角速度,ωf和ωr分别为汽车的前轮角速度和后轮角速度,lf和lr分别为汽车前轮和后轮到质心的距离,J为汽车车轮的转动惯量(前、后轮取值一致),δf为汽车前轮转角,Cair_x和Cair_y分别为汽车纵向和侧向空气阻力系数,AL_x和AL_y分别为汽车纵向和侧向迎风面积,ρ为空气密度,Td为驱动力矩,Re为车轮滚动半径,Flf、Flr、Fsf、Fsr分别为混合滑移状态下前、后车轮的纵向力和侧向力,Tbf、Tbr分别为前、后车轮的制动力矩.车辆参数取值如下:m=1 500kg,Iz=3 000kg·m2,lf=1.2m,lr=1.3m,J=1kg·m2,Cair_x=0.3,Cair_y=0.4,AL_x=1.7m2,AL_y=3.5m2,ρ=1.29kg/m3,Re=0.224m.
图1是单轨汽车系统模型示意图.图中β为汽车质心侧偏角,xCoG、yCoG分别为汽车质心坐标系的坐标轴.
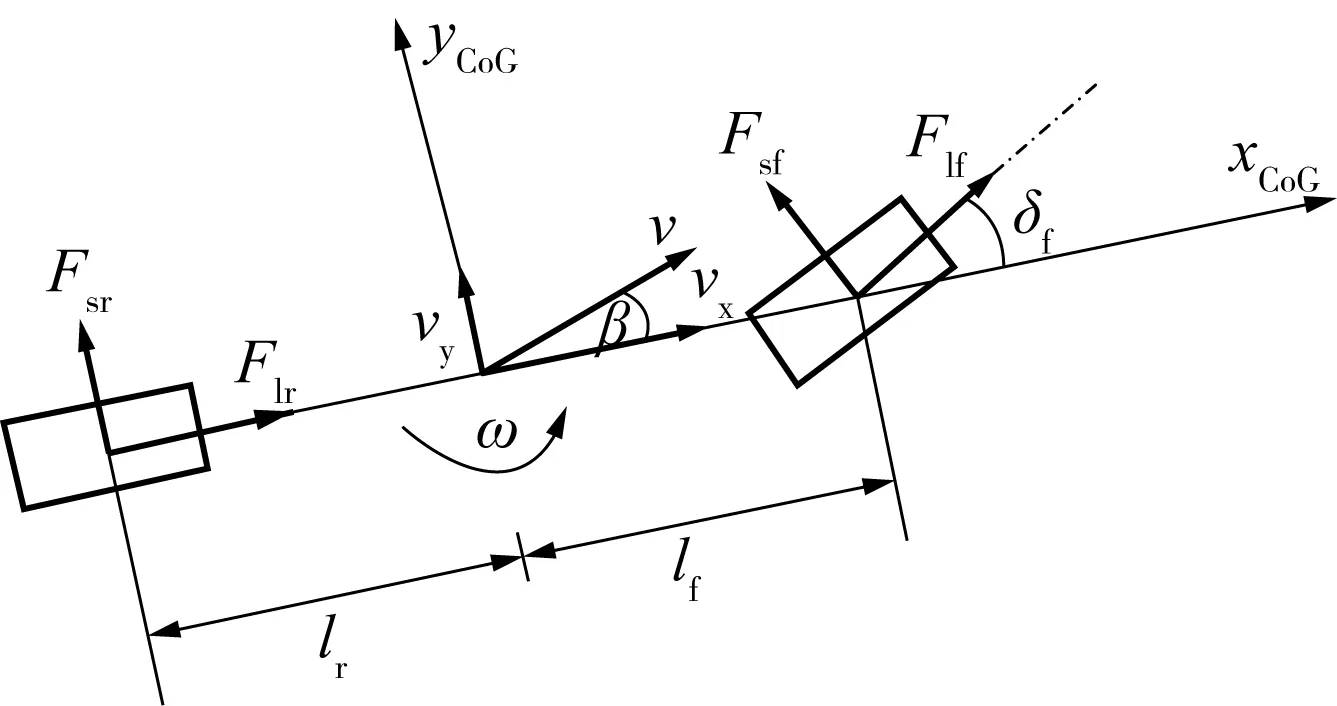
图1 汽车系统模型示意图Fig.1 Schematic diagram of vehicle system model
采用魔术公式[13]计算轮胎的纵向力或侧向力F:
F=Dsin(Carctan(Bx-E(Bx-arctan(Bx))))
(2)
式中,B、C、D、E为轮胎力参数,x为轮胎滑移率或侧偏角.
稳态滑移率计算式为[13]
(3)
式中,ωw为车轮转动角速度,vwx为车轮平面内轮心处的纵向速度.
前、后轮胎的纵向和侧向力参数[14]见表1.
表1前、后轮胎的纵向和侧向力参数
Table 1Longitudinal and lateral parameters of front and rear tyre force
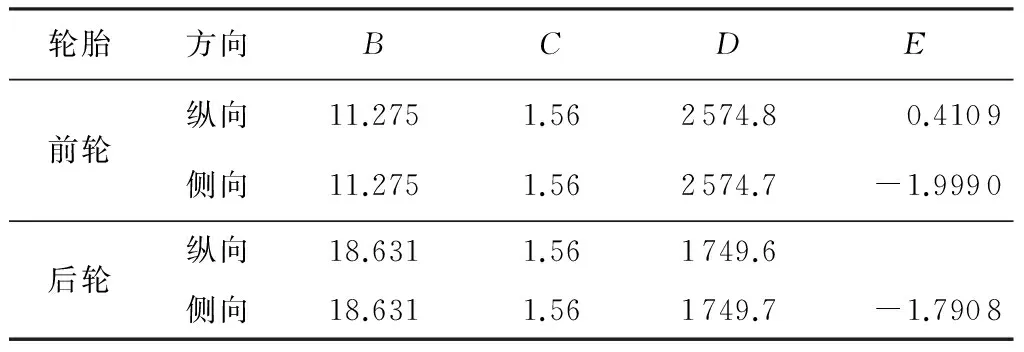
轮胎方向BCDE前轮纵向11.2751.562574.80.4109侧向11.2751.562574.7-1.9990后轮纵向18.6311.561749.6侧向18.6311.561749.7-1.7908
前、后轮胎的侧偏角αf和αr的表达式分别为
(4)
(5)
式中,δr为后轮转角.
文中采用Pacejka[13]提出的模型分析轮胎混合滑移,具体计算公式为
(6)
式中:Flf0、Flr0、Fsf0、Fsr0分别为稳态下前、后车轮的纵向力和侧向力,其大小可以根据式(2)计算;Gx、
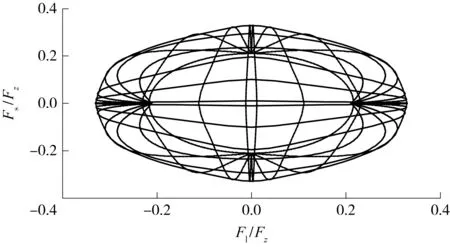
图2 轮胎力混合滑移特征Fig.2 Combined slip characteristics of tyre force
Gy为轮胎力混合滑移修正函数;rx,1、rx,2、ry,1、ry,2为轮胎力混合滑移修正系数,文中分别取值为35、40、40、35.
利用上述参数计算得到的轮胎力混合滑移特征如图2所示.其中,Fs和Fl分别为混合滑移状态下的轮胎侧向力和纵向力,Fz为轮胎的垂直载荷.
2相空间分析
相空间特征是非线性动力学研究中重要的分析内容.不失一般性,文中选择后轮驱动系统进行分析,即前轮驱动力矩为0.
前轮转角为0 、驱动力矩Td取70和140 Nm、纵向速度初值为40 m/s时,后轮驱动系统多初值点的相空间轨迹如图3所示,相空间轨迹在vy-ω平面上的投影如图4所示.
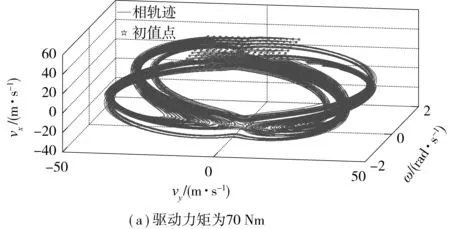
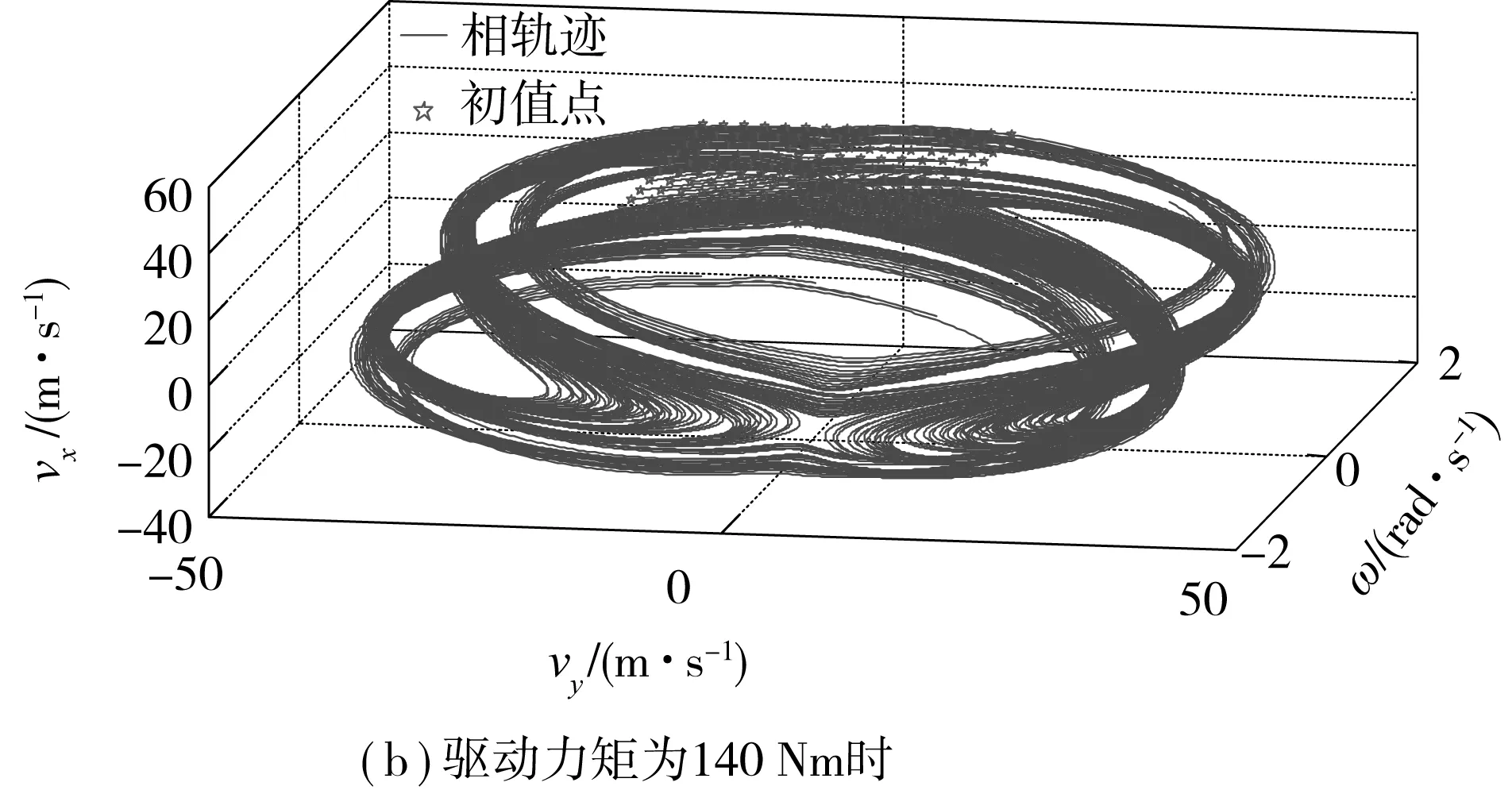
图 3 不同驱动力矩下系统的相空间轨迹Fig.3 Phase space trajectories of system under different driving torque
由图3、4可知:随着驱动力矩的增大,系统模型的相空间轨迹变得更加复杂;当驱动力矩由70 Nm 增大到 140 Nm 时,系统失稳后的最大横摆角速度ω(单位为rad/s)的变化范围由[-1.323,1.323]扩大到[-1.813,1.813],五自由度汽车动力学系统的相空间轨迹在vy-ω平面上的投影中对应的稳定区域(吸引域)随着驱动力矩的增大而缩小.
3时域分析
系统状态变量的时域响应是分析系统状态最直接的方法,为与相空间分析的结果进行对比,文中还进行了系统状态变量的时域分析.
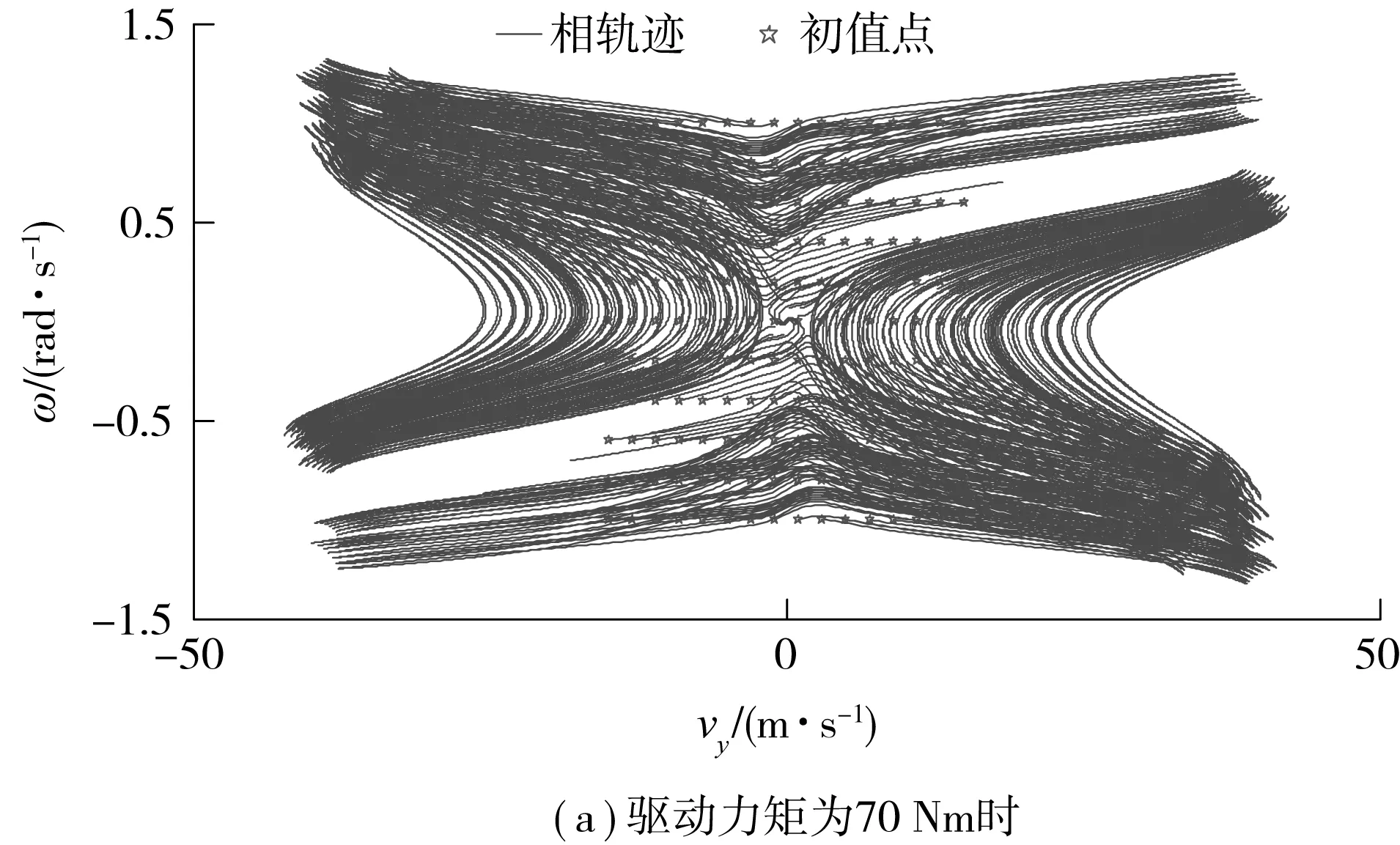
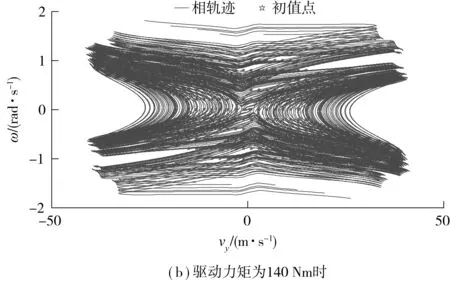
图4 不同驱动力矩下系统的相空间轨迹在vy-ω平面上的投影Fig.4 Phase space trajectories of system onto vy-ω plane under different driving torque
图5为系统状态变量时间序列的数值计算结果,仿真条件如下:前轮转角为0,纵向速度初值为40 m/s,侧向速度初值为2 m/s,横摆角速度初值为0.17 rad/s,后轮驱动系统的驱动力矩分别为70和140 Nm.
当驱动力矩Td=70 Nm时,汽车系统的动力学状态很快稳定下来,即侧向速度和横摆角速度迅速收敛到0,纵向速度由于空气阻力大于驱动力矩而逐渐减小;当驱动力矩增加到140 Nm时,汽车系统的动力学状态已不能稳定,即纵向速度、横摆角速度和侧向速度开始剧烈变化.这与相空间分析得到的结论一致.
仿真过程中车身姿态的变化(图中矩形有尖头的方向代表车头方向)如图6所示.从图中可以看到,当驱动力矩Td=70 Nm时,车身姿态稳定,当驱动力矩增加到140 Nm时,车身姿态出现了旋转,此时汽车已经失稳.
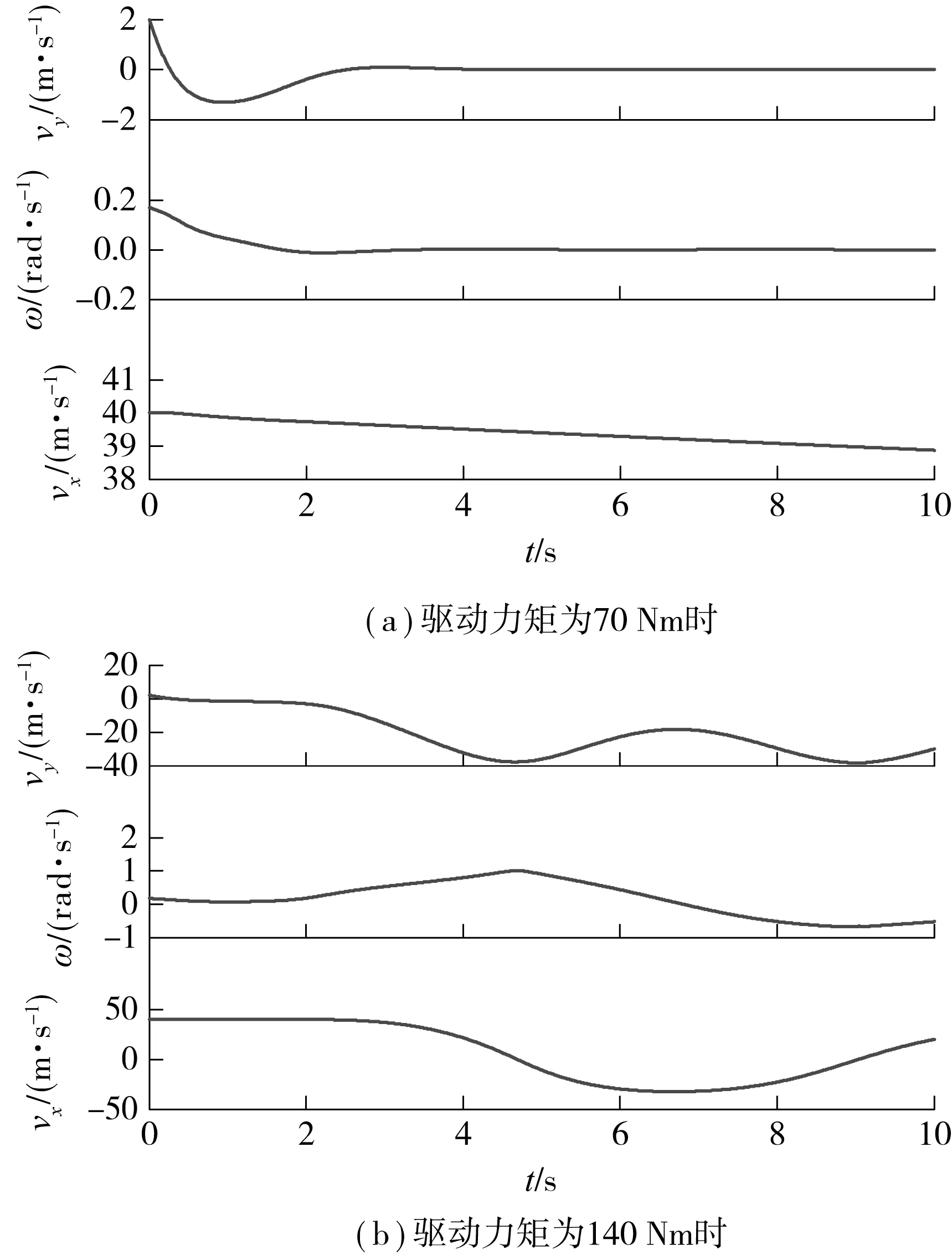
图5 不同驱动力矩下系统状态变量的数值计算结果Fig.5 Numerical calculation results of system state variables under different driving torque
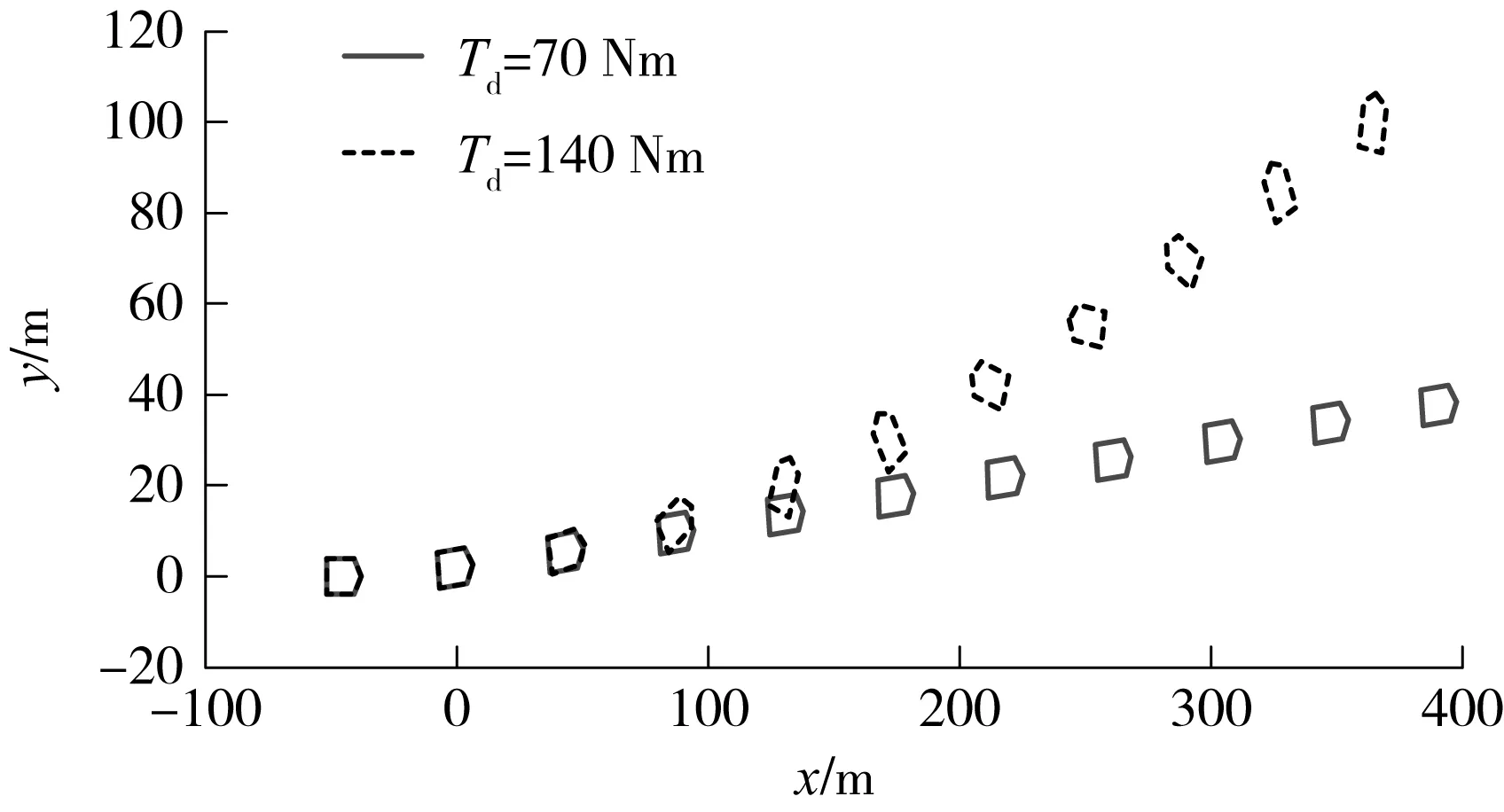
图6 车身姿态变化Fig.6 Vehicle body posture
在驱动力矩Td为70 、140 Nm时,整个仿真过程中轮胎力的分布特征如图7所示,图中纯滑移是相对于混合滑移而言的,即代表不考虑混合滑移的稳态轮胎特性.
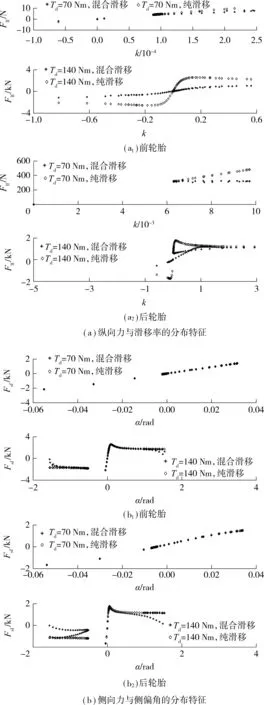
图7 不同驱动力矩下轮胎力的分布特征Fig.7 Distribution characteristics of tyre forces under diffe-rent driving torque
结合相空间分析和时域分析的结果可以看出:当驱动力矩Td=70 Nm 时,汽车的动力学状态比较稳定,前轮和后轮的轮胎纵向力、侧向力都处于线性工作区域,混合滑移的纵向力较纯滑移的稳态轮胎力有所减小,但侧向力变化不明显;当驱动力矩增加到Td=140 Nm时,轮胎力由线性区域扩展到非线性区域.
对比上述分析发现,当纵向速度初值为40 m/s、侧向速度vy=2 m/s、横摆角速度ω=0.17 rad/s、恒定驱动力矩Td=70 Nm 时,汽车系统仍能迅速稳定到侧向速度为0和横摆角速度为0的状态;随着驱动力矩由70 Nm增加到140 Nm时,汽车的行驶状态将失稳.由此可见,当驱动力矩为恒定值时,驱动力矩的大小将影响汽车的动力学特征.
4分岔分析
五自由度汽车系统的动力学方程本质上定义的是一个连续的微分系统.结合非线性系统的分岔定义[15],文中以驱动力矩为参数分析系统的分岔特征.
不同驱动力矩时vy-ω的相空间轨迹如图8所示.仿真条件为:在前轮转角为0 的条件下,当纵向速度初值vx=40 m/s、vy=2 m/s、ω=0.17 rad/s时,后轮驱动系统的驱动力矩Td(单位为 Nm)的取值范围为[10,140],取值间隔为5 Nm.图8中由同一初值点引入的不同相轨迹分别代表了不同驱动力矩对应的动力学状态.
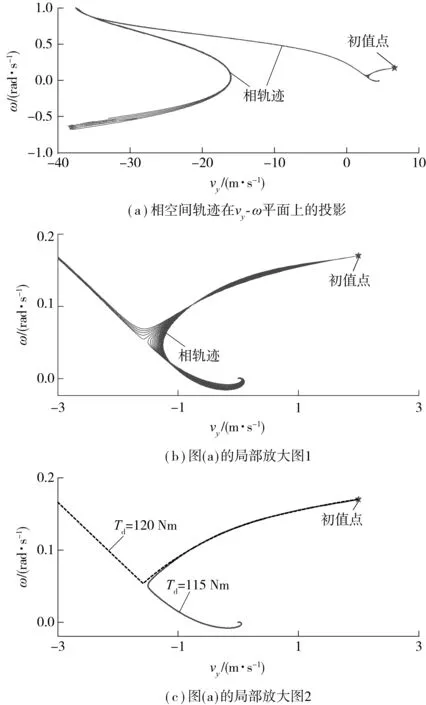
图8 驱动力矩在115~120 Nm变化时系统的相空间轨迹在vy-ω平面上的投影Fig.8 Phase space trajectories onto vy-ω plane under different driving torque of 115~120 Nm
由图8可知:随着驱动力矩的增加,系统的相轨迹连续变化,当驱动力矩由115 Nm增加到120 Nm时,系统的相轨迹发生了明显的变化,此时状态变量的数值计算结果如图9所示,此结果与相空间得到的结果一致.即当驱动力矩由115 Nm增加到120 Nm时,系统的解也同时发生了相应的变化.
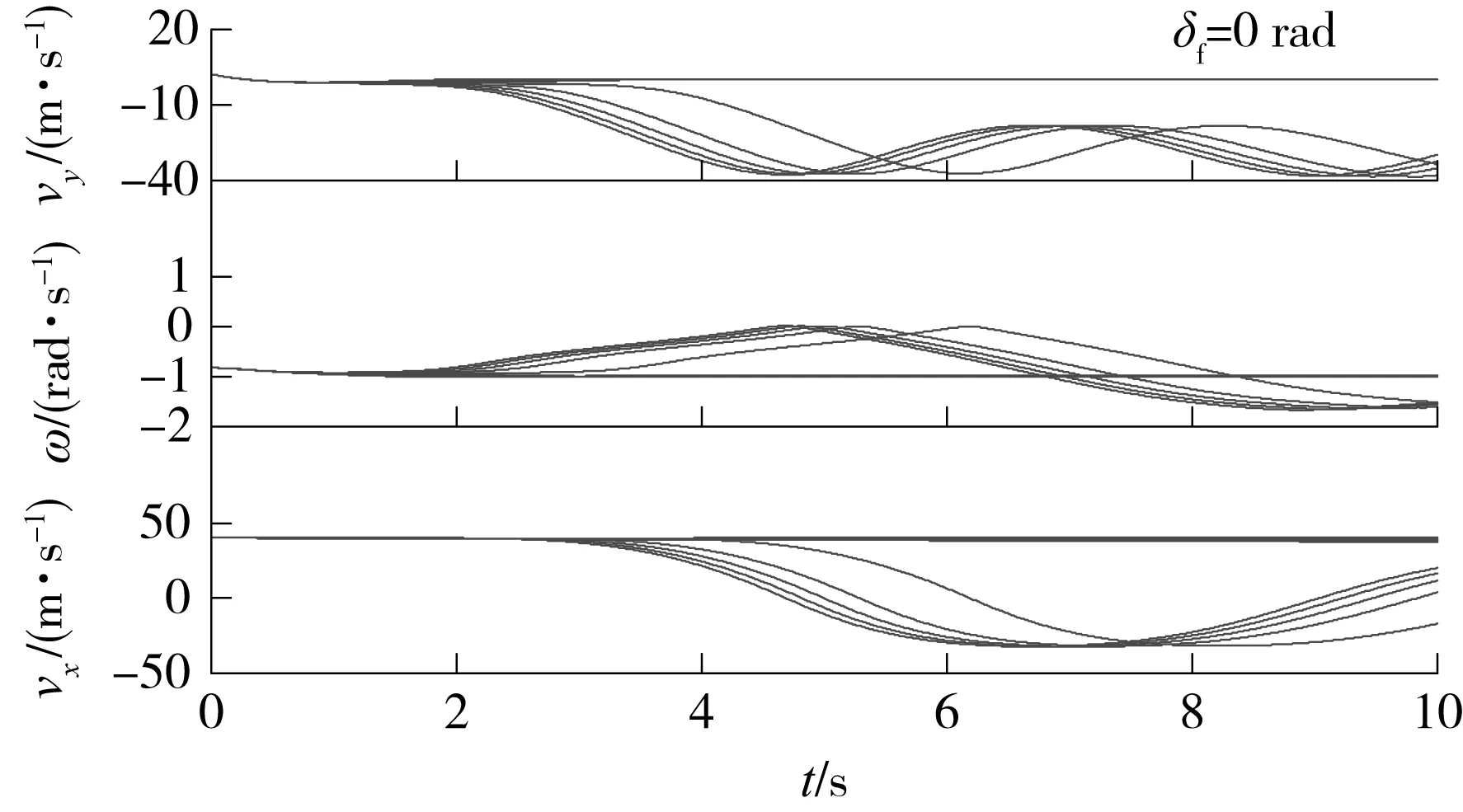
图9 驱动力矩在115~120 Nm变化时系统的状态变量Fig.9 System state variables under different driving torque of 115~120 Nm
减小驱动力矩的取值间隔,经计算发现,当驱动力矩由Td=119 Nm增加到Td=120 Nm时,系统相轨迹的拓扑结构发生突然变化,即分岔现象,如图10所示.
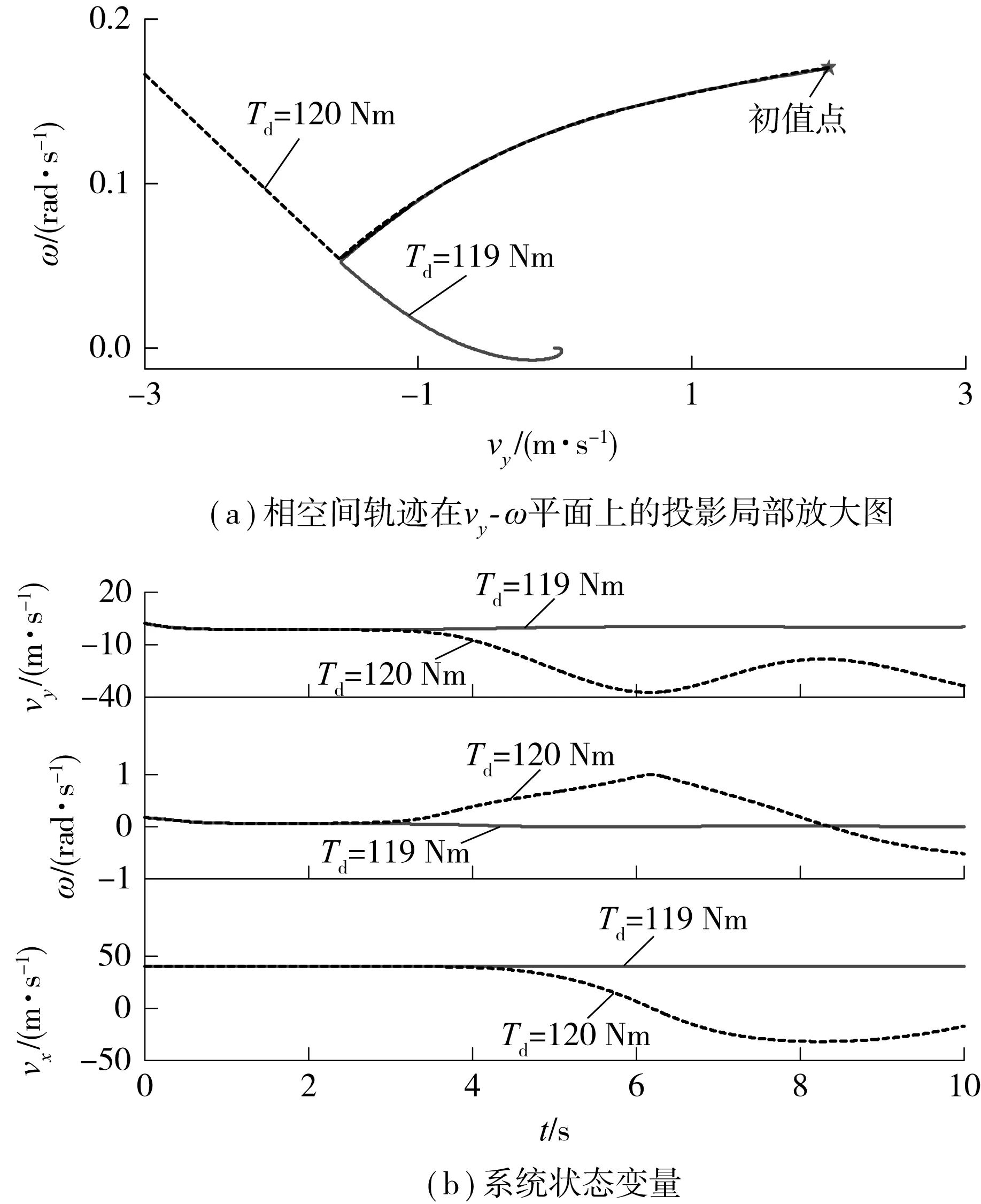
〗图10 驱动力矩在119~120 Nm变化时系统的相空间轨迹及状态变量Fig.10 Phase space trajectories and system state variables under different driving torque of 119~120 Nm
给定汽车系统初值vx=40 m/s,vy=2 m/s,ω=0.17 rad/s,利用Matlab求解五自由度汽车动力学系统方程,得到系统状态变量随时间的变化值.在一定的仿真时间内(总时长为200 s),略去开始2.5 s(1个采样周期)的数据后,对状态变量按采样频率f=0.4 Hz进行采样.所有采样点的状态变量与驱动力矩在相应的变化范围内构成了汽车系统状态变量随驱动力矩增大的分岔图,如图11(a)所示.观察分岔图可知:当驱动力矩Td≤119 Nm时,侧向速度vy和横摆角速度ω均迅速稳定到0,而纵向速度vx在驱动力矩较小时有所降低,随着驱动力矩的增大,纵向速度逐渐稳定增大到40 m/s;当驱动力矩Td>119 Nm时,系统的侧向速度、横摆角速度和纵向速度均开始剧烈变化,其相空间轨迹发生了突变.
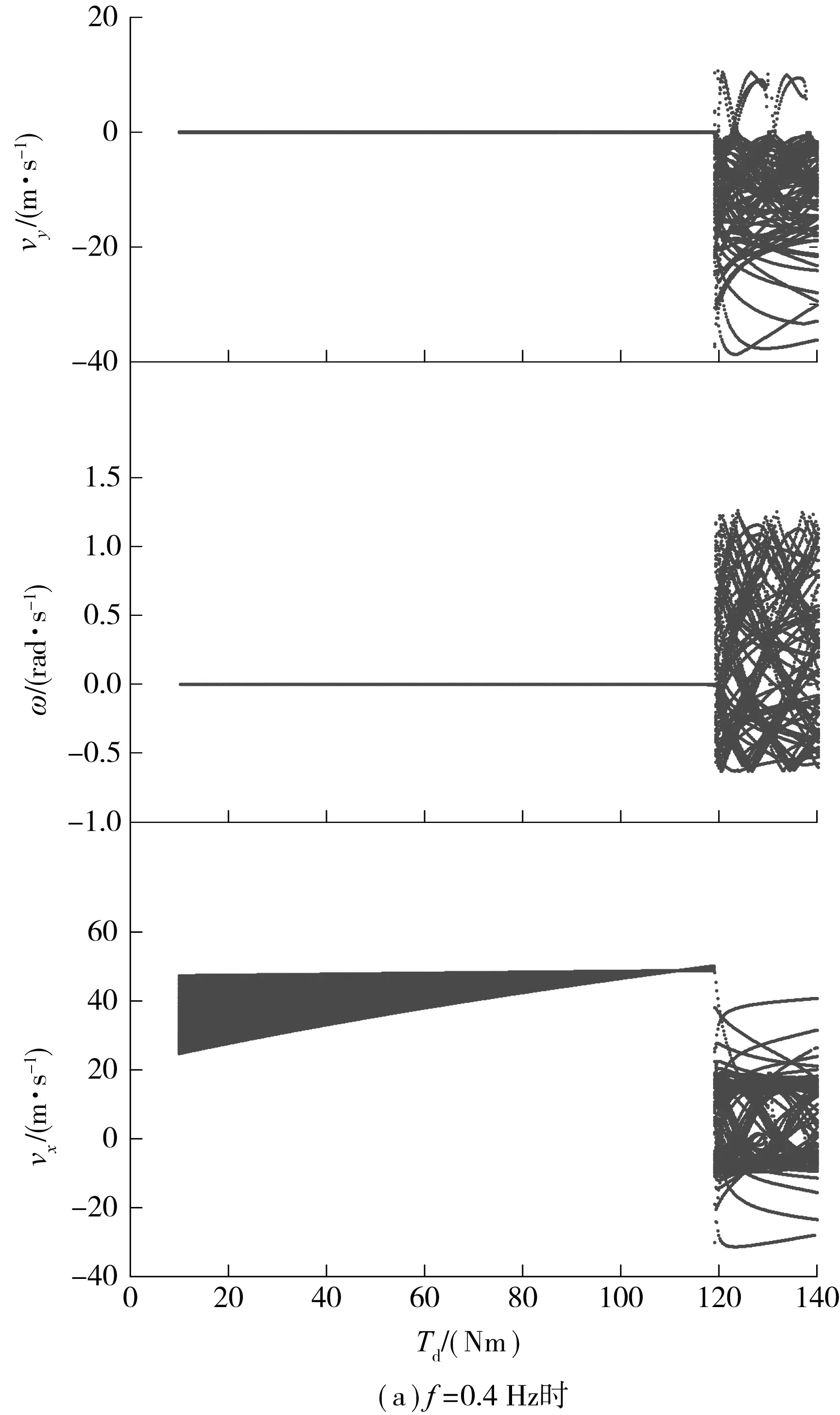
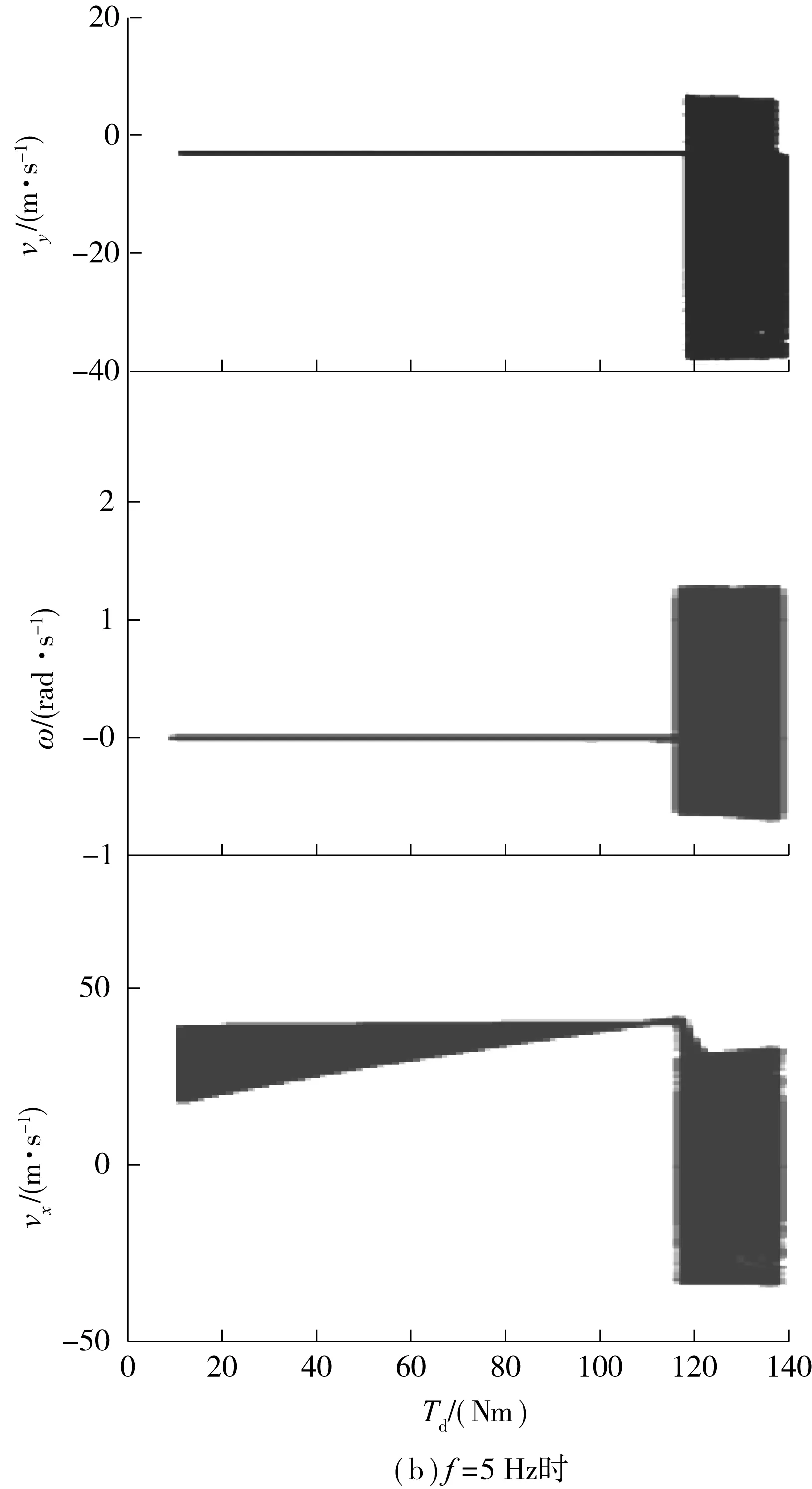
图11 不同采样频率下汽车系统侧向速度、横摆角速度和纵向速度的分岔图Fig.11 Bifurcation diagrams of lateral velocity,yaw velocity and lateral velocity of vehicle system under different sampling frequencies
在上述相同仿真条件下,提高采样频率为5.0 Hz,略去开始4 s(20个采样周期)的数据后的分岔图如图11(b)所示.由图中可以看出,随着采样频率的提高,分岔图中的数据点越来越密集,但各个状态变量的动力学特征并没有发生本质上的变化,分岔时对应的驱动力矩仍为119 Nm.
5结论
(1)相空间分析、时域分析和分岔分析的结果说明驱动力矩对汽车动力学特征存在明显的影响.
(2)在前轮零转角输入条件下,随着驱动力矩的增大,五自由度汽车动力学系统发生分岔现象,即驱动力矩可以作为汽车动力学系统的分岔参数.
(3)在今后的工作中可结合五自由度汽车动力学系统的平衡点求解继续深入分析驱动力矩对汽车动力学特征的影响.
参考文献:
[1]喻凡,李道飞.车辆动力学集成控制综述 [J].农业机械学报,2008,39(6):1-7.
YU Fan,LI Dao-fei.Review on integrated vehicle dyna-mics control [J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(6):1-7.
[2]ROSSA Fabio Della,GOBBI Massimiliano,MASTINU Gianpiero,et al.Bifurcation analysis of a car and driver model [J].Vehicle System Dynamics,2014,52(Supplement):142-156.
[3]FARRONI Flavio,RUSSO Michele,RUSSO Riccardo,et al.A combined use of phase plane and handling diagram method to study the influence of tyre and vehicle characteristics on stability [J].Vehicle System Dynamics,2013,51(8):1265-1285.
[4]SADRI Sobhan,WU Christine.Stability analysis of a nonlinear vehicle model in plane motion using the concept of Lyapunov exponents [J].Vehicle System Dynamics,2013,51(6):906-924.
[5]SHEN Shuiwen,WANG Jun,SHI Peng.Nonlinear dyna-mics and stability analysis of vehicle plane motions [J].Vehicle System Dynamics,2007,45(1):15-35.
[6]余志生.汽车理论 [M].北京:机械工业出版社,2009.
[7]HORIUCHI Shinichiro,OKADA Kazuyuki,NOHTOMI Shi-nya.Analysis of accelerating and braking stability using constrained bifurcation and continuation methods [J].Vehicle System Dynamics,2008,46(Supplement):585-597.[8]刘丽,储江伟,施树明,等.车辆纵向加速度对操纵稳定性的影响分析 [J].振动与冲击,2009,28(6):145-149.LIU Li,CHU Jiang-wei,SHI Shu-ming,et al.Analysis on the influence of vehicle longitudinal acceleration on hand-ling stability [J].Journal of Vibration and Shock,2009,28(6):145-149.
[9]LIU Li,SHI Shuming,SHEN Shuiwen,et al.Vehicle planar motion stability study for tyres working in extremely nonlinear region [J].Chinese Journal of Mechanical Engineering,2010,23(2):185-194.
[10]MITSCHKE Manfred,WALLENTOWITZ Henning.汽车动力学 [M].陈荫三,余强,译.4版.北京:清华大学出版社,2009.
[11]WANG Xianbin,SHI Shuming,LIU Li,et al.Analysis of driving mode effect on vehicle stability [J].International Journal of Automotive Technology,2013,14(3):363-373.[12]KIENCKE Uwe,NIELSEN Lars.Automotive control systems [M].New York:Springer,2000.
[13]PACEJKA H B.Tyre and vehicle dynamic [M].Oxford:Elsevier,2006.
[14]NGUYEN Vincent.Vehicle handling,stability,and bifurcation analysis for nonlinear vehicle models [D].Wa-shington D C:University of Maryland,2005.
[15]刘秉正.彭建华.非线性动力学 [M].北京:高等教育出版社,2005.
责任编辑:许花桃
Effect of Driving Torque on Dynamic Characteristics of Vehicles
WANGXian-bin1SHIShu-ming2
(1. Traffic College, Northeast Forestry University, Harbin 150040, Heilongjiang, China;2. Traffic College, Jilin University, Changchun 130025, Jilin, China)
Abstract:In order to discover the effect of driving torque on the dynamic characteristics of vehicle system, firstly, a planar-motion nonlinear dynamic model of the vehicle system with five degrees of freedom (longitudinal velocity, lateral velocity, yaw rate, front-wheel rotational velocity and rear-wheel rotational velocity) is established on the basis of Magic tyre formula. Then, by taking the rear-wheel driving system as an example, the phase space analysis of multiple initial values, the time domain analysis of single initial value as well as the corresponding tyre-force distribution feature analysis is carried out, and the effect of constant driving torque on the dynamic characteristics of vehicle without front-wheel steering angle input is discussed. Finally, through a further analysis of the numerical calculation with constant driving torque, the bifurcation diagrams of system state variables are plotted. The results show that, under the condition of zero steering angle input, bifurcation phenomenon of the vehicle dynamic system with 5 degrees of freedom may occur with the increase of driving torque; and that driving torque has an obvious effect on the dynamic characteristics of vehicles.
Key words:ground vehicles; dynamics; driving torque; phase space analysis; bifurcation analysis
收稿日期:2015- 04- 07
*基金项目:黑龙江省自然科学基金资助项目(E2015052);东北林业大学中央高校基本科研业务费专项资金资助项目(2572015CB15) ;国家自然科学基金资助项目(51475199)
Foundation items: Supported by the Natural Science Foundation of Heilongjiang Province(E2015052) and the National Natural Science Foundation of China(51475199)
作者简介:王宪彬(1980-),男,博士,讲师,主要从事汽车动力学仿真与控制研究.E-mail:xbwang10@163.com
中图分类号:U461
doi:10.3969/j.issn.1000-565X.2016.03.013
