探地雷达在地下暗渠探测中的应用
2016-06-16胡晓
胡 晓
(舟山市定海区交通工程质量监督站,浙江 舟山 316000)
探地雷达在地下暗渠探测中的应用
胡晓
(舟山市定海区交通工程质量监督站,浙江舟山316000)
摘要:将探地雷达技术引入地下暗渠探测领域,采用时域有限差分法(FDTD法)模拟探地雷达探测地下暗渠,并根据模拟结果雷达剖面图中目标物的图像特征指导实际工程应用,成功地探测到地下暗渠的空间位置。
关键词:探地雷达;地下暗渠;探测
0引言
随着城市道路的发展,很多明渠被掩埋在地下成为了城市地下排水管网的一部分。由于年代较远、资料缺失,无法知道地下暗渠的布设,不能为城市汛期防汛提供可靠的排水管网资料,或容易造成在建工程施工时对暗渠的破坏。因此,有必要探明地下暗渠的分布状况,为城市地下管网管理部门和城市建设规划部门提供相关资料[1]。
传统的电磁感应法对金属管线敏感,对非金属管线的适应性差。探地雷达可应用于地下暗渠等非金属管线探测,而且具有明显的优势。探地雷达具有高分辨率、快捷、无损并能实时显示地下图像,准确定位地下目标物的优点[2]。
1技术方法
探地雷达是一种使用高频电磁波探测地下媒质的非开挖性探测方法,由发射天线向地下发射高频电磁波,遇到不同的媒质,部分电磁波发生反射现象返回,为接收天线所接收,其工作原理见图1。
探地雷达在地下暗渠探测中的应用前提是,暗渠与周围媒质的电磁性参数存在明显差异。暗渠除了上面盖板材质与周围介质存在一定差异外,更主要的是暗渠内部媒质如水、空气等与周围媒质电磁性差异更大。电磁波在媒质中的传播特性反映了地下媒质的物性差异。根据探地雷达仪器接收到反射波的双程旅行时间、信号幅度与波形等资料确定地下暗渠的位置[3]。
地下暗渠的平面位置可根据雷达剖面图中暗渠异常在测线上的位置确定,而到测线的垂直距离为[4]:
(1)
式中:d为目标体到测线的垂直距离,m;V为电磁波在介质中的传播速度,m/ns;T为记录的反射电磁波双程走时,ns;X为发射天线与接收天线之间的距离,m。
(2)
其中:C为光速(0.3m/ns);εr为介质相对介电常数,其取值可参照表1[4]。
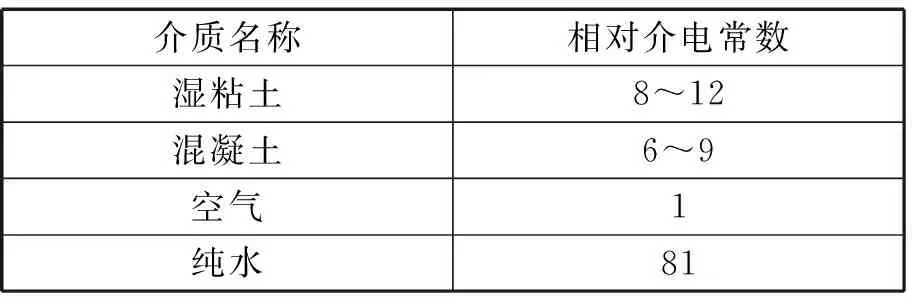
表1 几种常见介质的相对介电常数

图1 探地雷达工作原理图
2数值模拟
探地雷达的数值模拟是研究电磁波在介质中传播路径和传播规律的有效手段,数值模拟结果的图像特征对于提高探地雷达数据解释的准确性具有重要的意义[5]。目前探地雷达数值模拟较为成熟的分析计算方法为时域有限差分法。时域有限差分法是在时域计算电磁场的一种数值方法,它从含时间变量的两个Maxwell方程出发,利用二阶精度的中心差分代替Maxwell方程中的微分算符,从而模拟探地雷达电磁波传播以及与介质相互作用的过程[6-8]。
假设探地雷达探测地下暗渠的地电模型如图2所示,地表以上是空气层,地表以下是湿粘土层,湿粘土层中有地下暗渠。湿粘土层深度为5.0m,假定其相对介电常数εr为12.0,电导率σ为0.1S/m,相对磁导率μr为1.0。地下暗渠分为三层,上层为混凝土盖板,中层为空气,下层为水。混凝土盖板左下角坐标为(2.5,2.8),右上角坐标为(4.5,2.5),相对介电常数εr为7.0,电导率σ为0.005S/m,相对磁导率μr为1.0;空气层左下角坐标为(2.5,3.0),右上角坐标为(4.5,2.8),相对介电常数εr为1.0,电导率σ为0.0S/m,相对磁导率μr为1.0;水层左下角坐标为(2.5,4.0),右上角坐标为(4.5,3.0),相对介电常数εr为80.0,电导率σ为0.05S/m,相对磁导率μr为1.0。
探地雷达数值模拟时,选择Ricker子波作为激励源,设置100MHz中心频率的天线,时窗长度为160ns,天线间距1.0m,步距0.1m,测线从1.0m到6.0m且垂直于暗渠走向,共采集51道,采用matlab语言进行编程,数值模拟结果如图3。暗渠的横断面为矩形,从图3中可知,其在探地雷达剖面图上的图像特征为:中间表现出一个近似直线的反射信号,两端各为半支下开口的抛物线。

图2 地电模型
模型中粘湿土的相对介电常数εr为12.0,代入公式(2),可知电磁波在湿粘土中的传播速度约为0.087 m/ns,模型中发射天线与接收天线之间的距离X为1.0m。探地雷达模拟剖面图上暗渠盖板电磁波反射双程走时约为59ns,代入公式(1),可知盖板埋深约为2.5m,与模型一致。
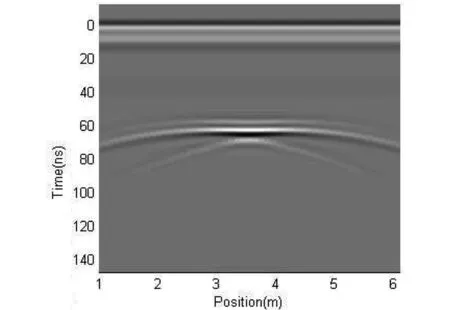
图3 探地雷达模拟剖面图
3工程应用
图4为探地雷达在市政道路下暗渠探测中的应用。根据场地环境和探测目的选用100MHz天线进行探测。仪器的采集参数如下:时窗长度160ns,天线间距1.0m,步距0.1m,叠加次数16次,里程计触发。
图4中异常区域图像中间表现出一个近似直线的反射信号,两端各为半支下开口的抛物线,与图3中探地雷达模拟图中地下暗渠的图像特征一致,所以图4中异常区域为目标物地下暗渠。从图4中可知,地下暗渠位于测线3.5m至6.4m,暗渠盖板电磁波反射双程走时约为34ns,而天线间距为1.0m,根据表1并结合场地经验假定电磁波传播速度为0.087 m/ns(相对介电常数取12),代入公式(1),可知盖板埋深约为1.4m,与现场开挖情况基本符合。

图4 探地雷达实测剖面图
4结语
探地雷达技术的应用领域较为广泛,越来越受工程界的青睐。文中根据湿粘土中埋设暗渠的地电模型,采用FDTD法模拟探地雷达探测地下暗渠。从模拟结果雷达剖面图可知,界面反射的中间表现出一个近似直线的反射信号,两端各为半支下开口的抛物线,与表现为向下开口呈伞形状抛物线的圆形管道有所区别。探地雷达实测剖面图中地下暗渠的图像特征与模拟结果相似,说明探地雷达在地下暗渠探测中的应用是可行的。
在地下暗渠探测应用中,为了较为精准地定位地下暗渠的平面位置,可采用里程计现场定位,探测时发现雷达剖面图上的异常信号,通过里程计的前进或后退功能定出地下暗渠在测线的位置,再结合雷达剖面图中目标物的深度位置,从而确定地下暗渠的整体空间位置。
参考文献:
[1]陈军,赵永辉,万明浩. 地质雷达在地下管线探测中的应用[J].工程地球物理学报,2005,2(4):260-263.
[2]薛飞,吴赛钢,吴宝杰. 探地雷达在地下障碍物探测中的应用[J].市政技术,2010,28(3):157-159.
[3]吴宝杰,张莉,杨桦,等.探地雷达在基坑流砂掏空区探测中的应用[J].工程地球物理学报,2007,4(5):425-429.
[4]张顺东,方成,黄圣棕.地质雷达在桩底岩溶探测中的应用[J].地震地磁观测与研究,2005,26(4):103-106.
[5]曾昭发,刘四新,王者江,等.探地雷达方法原理及应用[M].北京:科学出版社,2006.
[6]葛德彪,闫玉波.电磁波时域有限差分方法[M].第二版.西安:西安电子科技大学出版社,2005.
[7]戴前伟,冯德山,王启龙,等. 时域有限差分法在地质雷达二维正演模拟中的应用[J].地球物理学进展,2004,19(4):898-902.
[8]喻振华,冯德山,戴前伟,等.复杂地电模型的探地雷达时域有限差分正演[J].物探化探计算技术,2005,27(4):279-283.
Application of Ground-Penetrating Radar in Detecting Underdrain
HU Xiao
(Dinghai District of Zhoushan Traffic Engineering Quality Supervision Station,Zhoushan 316000,China)
Abstract:With the development of urban roads,a lot of open channelbeing buried in the ground become underdrain.Because of the lack of data,do not know its distribution.In this paper,the ground penetrating radar technique is introduced into the underdrain detection field,using the finite difference time domain method (FDTD) simulate the GPR ground penetrating radar to detect the underdrain, and according to the simulation results radar profile of target in image feature guide practical engineering application, successfully detect the spatial position of the underdrain.
Key words:ground penetrating radar;underdrain;detect
收稿日期:2015-12-22
作者简介:胡晓(1982-),男,浙江定海人,工程师,E-mail:173958346@qq.com。
中图分类号:TU992
文献标识码:A
doi:10.3969/j.issn.1671-234X.2016.01.006
文章编号:1671-234X(2016)01-0026-03
