伺服驱动器EtherCAT接口故障诊断及容错技术的研究*
2016-06-16唐小琦颜外平
徐 健,宋 宝,唐小琦,颜外平
(华中科技大学 机械科学与工程学院,武汉 430074)
伺服驱动器EtherCAT接口故障诊断及容错技术的研究*
徐健,宋宝,唐小琦,颜外平
(华中科技大学 机械科学与工程学院,武汉430074)
摘要:为解决EtherCAT协议应用于伺服驱动器所产生的故障诊断及容错的问题,首先深入研究了基于EtherCAT协议的伺服控制系统架构,分析并总结了伺服驱动器EtherCAT总线接口所产生的运行故障及容错技术,然后设计并实现了基于总结归纳的三类故障诊断及容错机制流程,并搭建实验平台进行实验测试,实验结果表明,这种故障诊断和容错技术的应用很好地提高了EtherCAT总线式伺服驱动器运行的可靠性和稳定性。
关键词:EtherCAT;总线式伺服驱动器;故障诊断;容错
0引言
现场总线技术的出现为高速高精的全数字化加工控制提供了基础平台[1],基于实时工业以太网的现场总线技术可以实现百兆全双工的高速稳定通信,广泛应用于各类工业自动化控制设备当中[2-4]。
然而这些协议运用在不同种类的设备上时,就会与设备本身的功能产生融合问题,一方面要求设备应用能够充分利用协议接口实现功能的扩展;而另一方面又要确保协议接口本身不能影响设备的正常功能的实现。
基于此,本文针对工业以太网EtherCAT协议应用于伺服驱动器这一类设备当中所产生的故障诊断和容错问题进行了深入的分析,研究并设计EtherCAT总线式伺服驱动器故障诊断流程以及相应的容错机制,有效地解决了EtherCAT总线与伺服驱动器的融合集成问题,极大程度上提高了EtherCAT总线式伺服驱动器运行的可靠性和稳定性。
1EtherCAT的伺服控制
1.1EtherCAT的伺服控制系统
基于EtherCAT的伺服控制系统如图1所示,EtherCAT总线式伺服驱动器通过ESC(EtherCAT Slave Controller)接入EtherCAT网络中,EtherCAT主站通过集总帧的方式与各个伺服驱动器进行数据交互[5-6]。ESC对EtherCAT网络中的数据帧进行解析和转发,对有效数据进行上传和下载操作。伺服应用层再通过PDI(Process Data Interface)接口与ESC中的有效数据进行交互,实现伺服控制的功能。
EtherCAT支持的应用层协议和伺服驱动器控制行规包括CANopen和SERCOS,分别对应于CoE(CANopen over EtherCAT)和SoE(SERCOS over EtherCAT)。本文基于CoE应用层协议,研究伺服驱动器EtherCAT接口的故障诊断及容错技术。
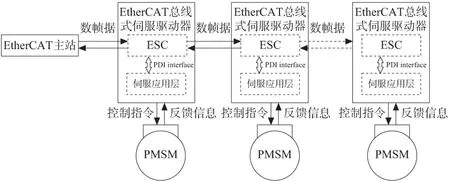
图1 EtherCAT伺服控制系统
1.2EtherCAT的伺服控制流程
基于CANopen协议的伺服控制框图如图2所示,CANopen伺服应用层通过周期性过程数据可以将EtherCAT网络中的指令数据置于经典的三环控制流程当中,同时将反馈信息返回到网络当中[7-9]。
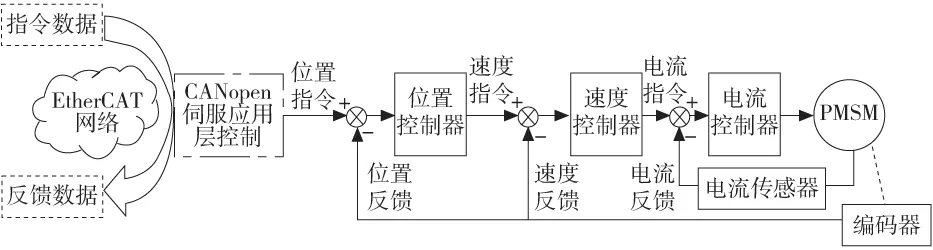
图2 CoE伺服控制框图
CANopen协议置于伺服应用层当中主要包括周期性过程数据的对象字典映射、CANopen邮箱通信协议实现对象字典参数的修改和功率设备状态机维护等三大部分的内容。
2EtherCAT接口故障诊断研究及设计
EtherCAT伺服控制系统在运行过程中会产生各类故障诊断信息,按照层次逻辑可以将其划分为三个方面,如图3所示。具体包括EtherCAT总线通信故障诊断,主要针对EtherCAT通信应用层状态的报警信息;CANopen协议通信故障诊断,主要诊断CoE邮箱通信等;伺服控制故障诊断,主要针对伺服三环控制算法中出现的故障进行诊断。
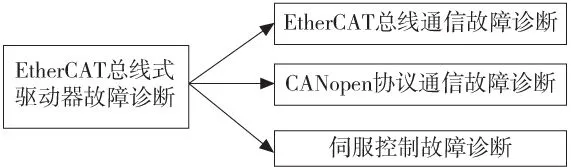
图3 EtherCAT伺服驱动器故障诊断分类
2.1EtherCAT总线通信故障诊断
EtherCAT协议定义了一系列的标准化应用层状态码,部分状态码如图4所示,其中主要定义了EtherCAT总线在初始化过程中配置的故障诊断信息,包括状态机、SM同步管理通道、PDO映射配置等。

图4 应用层部分状态码定义
以状态机状态码0x0011、0x0012和0x0013实现为例,其实现流程设计如图5所示。总线应用层不断循环检测应用层请求寄存器是否有状态机切换事件发生,若有则根据当前状态和请求状态计算状态转换逻辑,然后根据状态转换逻辑来判别是否产生相应的错误状态码;若进行正常的状态切换,则返回0x0000,并执行相应的状态机操作。例如,状态机由Init状态直接切换到Safe-Op状态,不符合协议要求,则直接返回0x0011状态码,即无效状态改变。
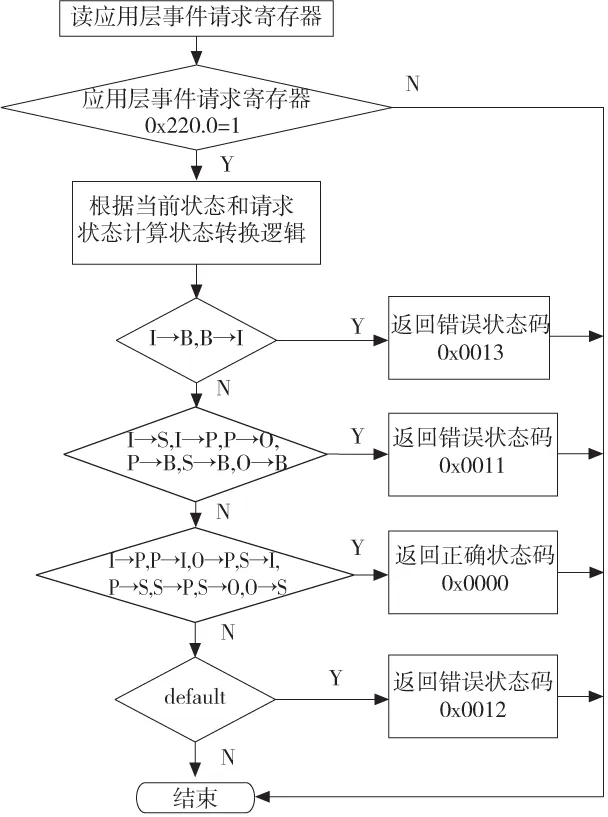
图5 状态机状态码实现流程设计
再以邮箱SM同步管理通道检测为例,设计流程如图6所示。从站状态在Pre-OP状态下时,读取邮箱SM0和SM1参数,顺序检测SM通道使能、读写属性、但缓存区检测、长度检测和地址检测等配置信息,若任何一个环节产生错误,则返回状态码0x0016。
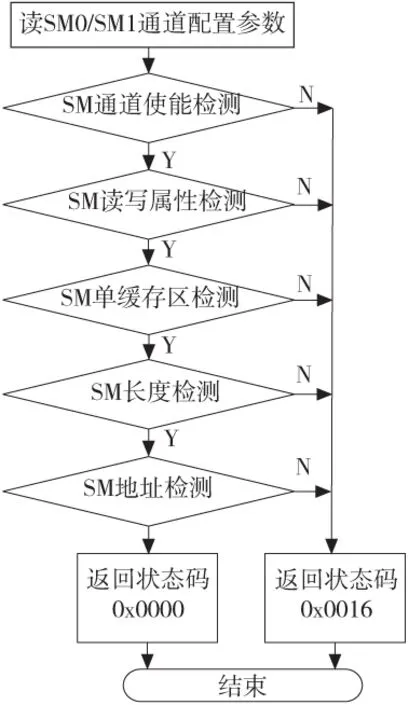
图6 邮箱配置状态码实现流程设计
2.2CANopen协议通信故障诊断
在进行SDO通信时,当产生错误时,从站将终止SDO传输,产生错误代码,由主站进行读取,CoE通信部分常用的终止代码如图7所示。
以其中的部分SDO终止代码实现为例,研究并设计了其实现流程,如图8所示。从CoE缓存队列中读取邮箱数据帧,首先判断邮箱头是否为CoE邮箱类型,反之则返回命令无效代码;然后,从数据帧中提取操作索引和子索引,根据索引和子索引查找数据字典,依次判断是否存在、子索引超差和读写属性等信息是否一致,反之则返回相应的错误代码。
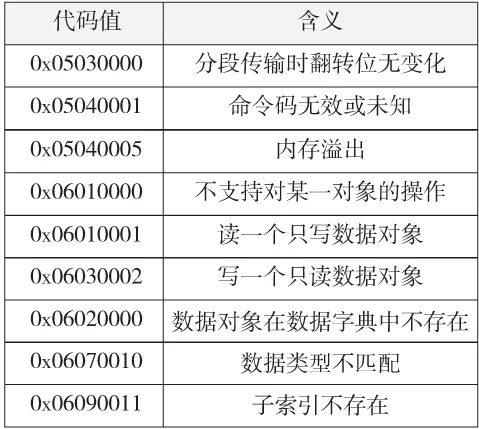
图7 部分SDO终止传输代码
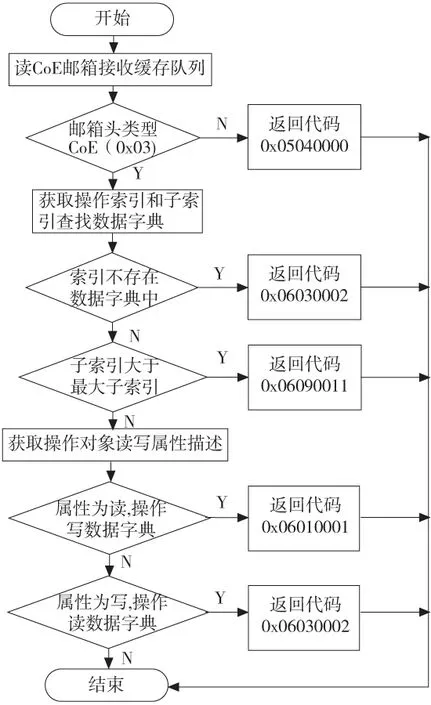
图8 SDO终止代码实现流程设计
2.3伺服控制故障诊断
伺服驱动器属于功率设备的一种,满足DS402功率设备状态机的要求,如图9所示。其中,伺服控制故障类型根据具体的伺服应用而定,但其反映在功率设备状态机中统称为出错。出错的状态统一反映在设备的状态字0x6041中,可由主站获取从站伺服的状态信息进行故障诊断判别。
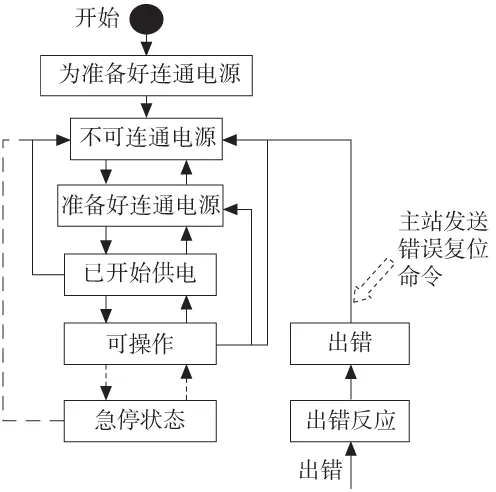
图9 CoE功率设备状态机
3EtherCAT接口容错技术研究及设计
当EtherCAT伺服驱动器经过故障诊断产生报警信息后,一方面从站根据所产生的报警信息进行自我容错的诊断,可归纳为从站主动容错技术;而另一方面主站获取到从站的报警信息后也会进行相应的容错处理,可称为从站被动容错技术,如图10所示。
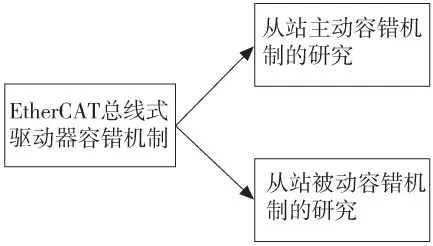
图10 伺服驱动器EtherCAT接口容错机制分类
3.1从站主动容错机制的设计
在上述出现的三类故障诊断信息中,CANopen协议通信故障产生的报警信息并不会影响从站功能正常实现,其次,伺服控制故障产生的报警信息并不能由从站自行进行复位,否则将会产生不安全的因素。因此,从站在自我容错机制当中,当总线通信出现故障时可以进行容错从而防止更进一步的危险出现。
在EtherCAT总线通信故障中,针对应用层时间产生的状态码,设计了如图11所示的主动容错流程。当从站通信产生应用层错误代码时,从站根据不同状态下的状态码进行相应的自我保护机制处理,即在不同的状态机切换下主动关闭相应的通信通道,避免进一步的错误数据传递。当产生错误代码时,对应于状态切换I→P(I→B)、P→S和S→O产生关闭对应邮箱通信通道、输入数据通道和输出数据通道。
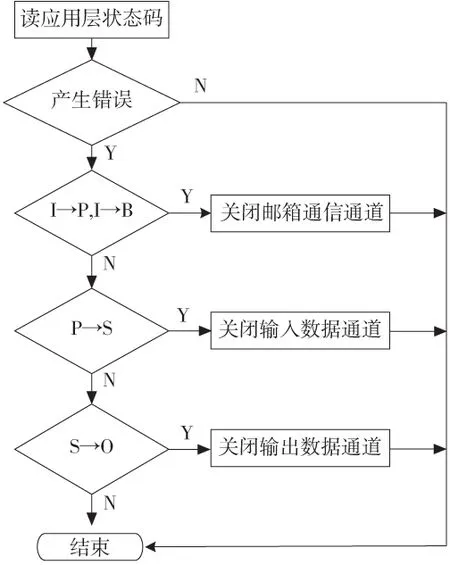
图11 从站主动容错流程
3.2从站被动容错机制的设计
从站的被动容错机制是在基于主站已经获取了从站的报警信息代码的前提之下,主站根据相应的报警复位清除策略对从站采取的容错流程。主要包括EtherCAT总线通信故障和伺服控制故障两类错误诊断,其中对于EtherCAT总线通信故障被动容错机制而言,从站在进入错误状态后,采取主动容错机制后,停止数据的输入输出,等待主站的复位信号出现后,开始响应主站的控制命令,同时开启输入输出通道,正常运行从站。
当伺服控制环产生故障诊断而EtherCAT总线通信正常时,产生的故障诊断信息通过伺服状态字0x6041反馈给主站,主站得知伺服控制产生报警时,通过如图9所示的CoE功率设备状态机进行伺服复位0x6040,重新执行伺服算法,主站控制器重新调整控制策略,进行伺服控制,达到被动容错的流程。
4实验测试平台及结果
本文实验平台的主站采用的是德国Beckhoff公司基于PC的自动化软件TwinCAT,从站采用的基于上述故障诊断技术设计的伺服驱动器,实验平台图如图12所示。
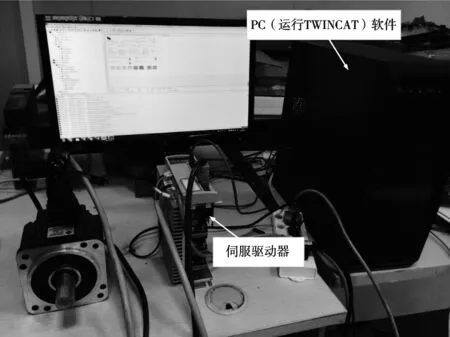
图12 实验测试平台
首先进行EtherCAT总线通信故障诊断的测试,以状态机切换为例,当总线处于初始化状态Init时,主站手动发送Boot状态指令,观测主站读取从站驱动器反应如图13所示,此时TwinCAT软件通过读取寄存器读取到了相应的应用层错误代码0x0013,即不支持引导状态。通过主从的一致检测可以反映基于上述流程设计的EtherCAT总线故障诊断技术产生作用。其余的分类测试结果与图5和图6中的结果保持一致。
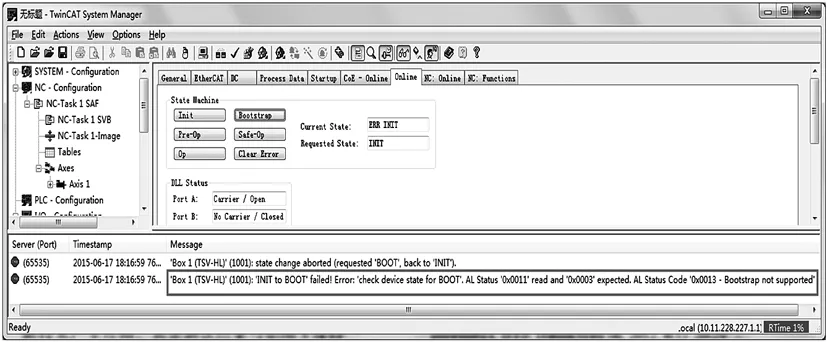
图13 应用层故障诊断测试
然后进行CANopen通信协议故障诊断实验,以进行写数据字典中不存在的索引为例,如TwinCAT软件发送读0x2000索引,子索引0,TwinCAT软件得到了从站的错误相应,代码为0x06020000,即从站伺服驱动器不存在这个索引,提醒主站的错误操作,如图14所示。
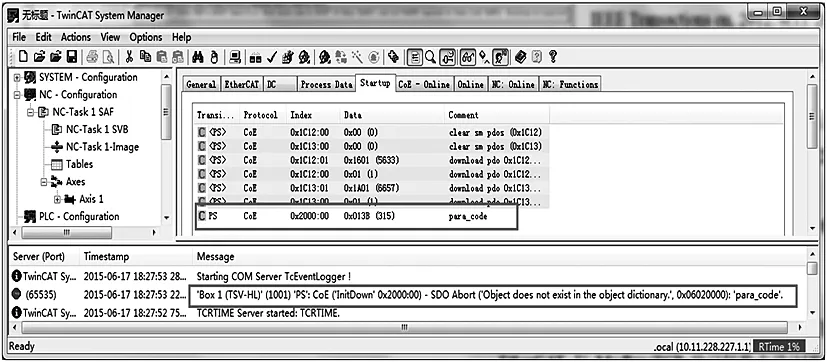
图14 CANopen邮箱通信诊断测试
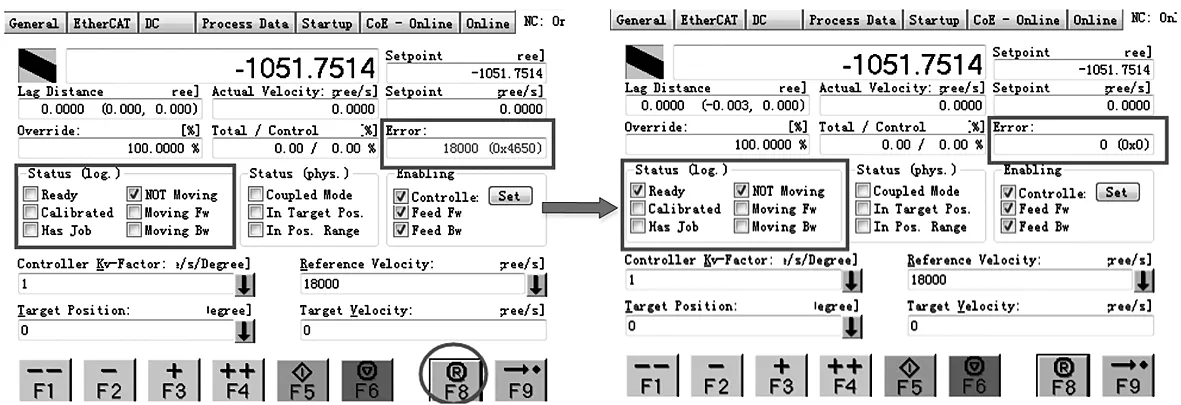
图15 伺服控制诊断测试
最后进行伺服控制故障诊断实验,当伺服控制电机正常运转时,人为地抽离编码器线缆,伺服掉强电使能产生错误报警,此时TwinCAT软件伺服控制面板上产生错误,如图15所示,当重新接入编码器线缆时,用伺服控制面板复位伺服控制错误,可以重新使伺服驱动器强电使能并清除报警信息,使伺服正常运转。
5结束语
本文针对EtherCAT总线协议应用于伺服驱动器这一类设备中所产生的故障诊断和容错技术进行了深入研究,设计并实现了各类故障及容错技术的实现流程,实验达到了令人满意的效果,对于提高EtherCAT总线式伺服驱动器的稳定性和可靠性有重要意义。
[参考文献]
[1] 谢剑. 高档数控系统中的现场总线接口技术设计与开发[D]. 上海:上海交通大学, 2010.
[2] 魏亚鹏, 韩卫光. 实时工业以太网技术的研究[J]. 组合机床与自动化加工技术, 2013 (7): 49-53.
[3] 朱政红, 王月娥. 工业以太网在控制领域中的实时性技术[J]. 低压电器, 2010 (7): 31-34.
[4] Orfanus D, Indergaard R, Prytz G, et al. EtherCAT-based platform for distributed control in high-performance industrial applications[C]//Emerging Technologies & Factory Automation (ETFA), 2013 IEEE 18th Conference on. IEEE, 2013: 1-8.
[5] 郇极, 刘艳强. 工业以太网现场总线 EtherCAT 驱动程序设计及应用[M]. 北京:北京航空航天大学出版社, 2010.
[6] 刘艳强, 王健, 单春荣. 基于 EtherCAT 的多轴运动控制器研究[J]. 制造技术与机床, 2008(6): 100-103.
[7] 阮倩茹, 王辉, 施大发, 等. 基于 EtherCAT 的高性能交流伺服控制系统设计[J]. 科技导报, 2010, 28(20): 58-61.
[8] Sung M, Kim K, Jin H W, et al. An EtherCAT-based motor drive for high precision motion systems[C]//Industrial Informatics (INDIN), 2011 9th IEEE International Conference on. IEEE, 2011: 163-168.
[9] Kim Y J, Kim K H, Bae Y C. An implementation of vector control of AC servo motor based on optical-EtherCAT network[J]. The Journal of the Korea institute of electronic communication sciences, 2013, 8(4): 583-588.
(编辑赵蓉)
Research on Fault Diagnosis and Fault Tolerance Technology of Servo Driver’s EtherCAT Interface
XU Jian, SONG Bao, TANG Xiao-qi, YAN Wai-ping
(School of Mechanical Science and Engineering, HuaZhong University of Science and Technology, Wuhan 430074, China)
Abstract:To solve the EtherCAT protocol applied servo drives produced by fault diagnosis and fault tolerance of problems, first in-depth study of the servo control system architecture based EtherCAT protocol, analyze and summarize the operational failure and fault tolerance technology servo drive’s EtherCAT bus interface have produced, then design and implement mechanism process based on summarized the three fault diagnosis and fault tolerance, and experimental platform to experiment experimental results show that the application of this fault diagnosis and fault tolerance techniques well improve the EtherCAT bus servo drive’s reliability and stability.
Key words:EtherCAT; bus type servo driver; fault diagnosis; fault tolerance
文章编号:1001-2265(2016)05-0083-04
DOI:10.13462/j.cnki.mmtamt.2016.05.022
收稿日期:2015-06-24;修回日期:2015-07-22
*基金项目:科技重大专项:高档数控机床与基础制造装备(2013ZX04007-021)
作者简介:徐健(1992—),男,江西宜春人,华中科技大学硕士研究生,研究方向为数控技术、现场总线及网络,(E-mail)xujian0935@163.com。
中图分类号:TH166;TG506
文献标识码:A
