柴电混合动力系统整车相关模型库建模
2016-06-15梁建伟
梁 建 伟
(石家庄职业技术学院 机电工程系,河北 石家庄 050081)
柴电混合动力系统整车相关模型库建模
梁 建 伟
(石家庄职业技术学院 机电工程系,河北 石家庄050081)
摘要:通过RTW建立了柴电混合动力系统整车控制器、电池、车体以及驾驶员模型.整车控制器包括能量管理、转矩分配、驾驶模式确定和牵引力控制,采用Rint建立了电池模型,车体模型根据车辆动力学模型建立,驾驶员模型分为前馈控制和反馈控制两方面.
关键词:柴电混合动力系统;建模;仿真
柴电混合动力整车仿真系统是对整车系统状态的描述,它在离线仿真模式下,能实现整车物理过程的数学描述,可以起到验证、调整和修正控制算法的作用.被验证有效的控制逻辑可以直接生成高等语言并能进行硬件运行,如通过RTW(real-time workshop)可直接生成C语言.
本文即通过RTW[1]系统直接生成C语言建立整车控制器HCU(hybrid control unit)、车体动力学、电池、驾驶员等模型,实现模型系统从构思设计、仿真到实物运行的开发过程.
1仿真平台模型建立的整体思路
当前的仿真平台模型主要以离线仿真为主,从局部到整体依次是:
(1)模块(blocks)
模块用于验证实现一个基础的功能或者逻辑.
(2)特征算法(features)
它在大多数情况下为一个开环算法,能够实现和验证一个基本的算法逻辑.
(3)组件(components)
模块组合通常用来验证组件级别、算法之间的影响或者和外部的交互功能.
(4)应用系统(applications)
应用系统大多数是闭环系统,用于演算预测控制逻辑或算法在实际工作环境下的运行情况和控制效果.
本文依照仿真平台建立的思想,从基础的系统模型库开始建立仿真平台, 即完成blocks-features-components-system的仿真系统建立过程.仿真系统以观察转矩传递为主,包括HCU、电池、车体和驾驶员模型.
2混合动力整车控制器HCU建模
HCU模型包括逻辑分析模块和实验数据参数.混合动力整车控制器示意图见图1,它包括4方面的功能[1].
(1)能量管理
蓄电池SOC(state of charge)观测就是当前可用的电能观测,主要目标是保证SOC在设定的工作范围内,避免电池过充或者过放.而能量管理策略会给出目标电功率值,影响电机生成正电流或者负电流;它也会根据SOC值生成一个标志,用于在SOC较高时禁止再生制动.
(2)转矩分配
通过采集加速和制动踏板的信号值来计算目标驱动转矩.目标转矩根据当前驾驶模式和能量分配策略计算发动机的输出转矩和电机输出转矩.在某些模式下,整车仅由一种动力源驱动,例如,在电驱动模式下,驾驶员需求转矩完全由电机来满足,能量管理仅根据电池SOC的电气参数进行计算.
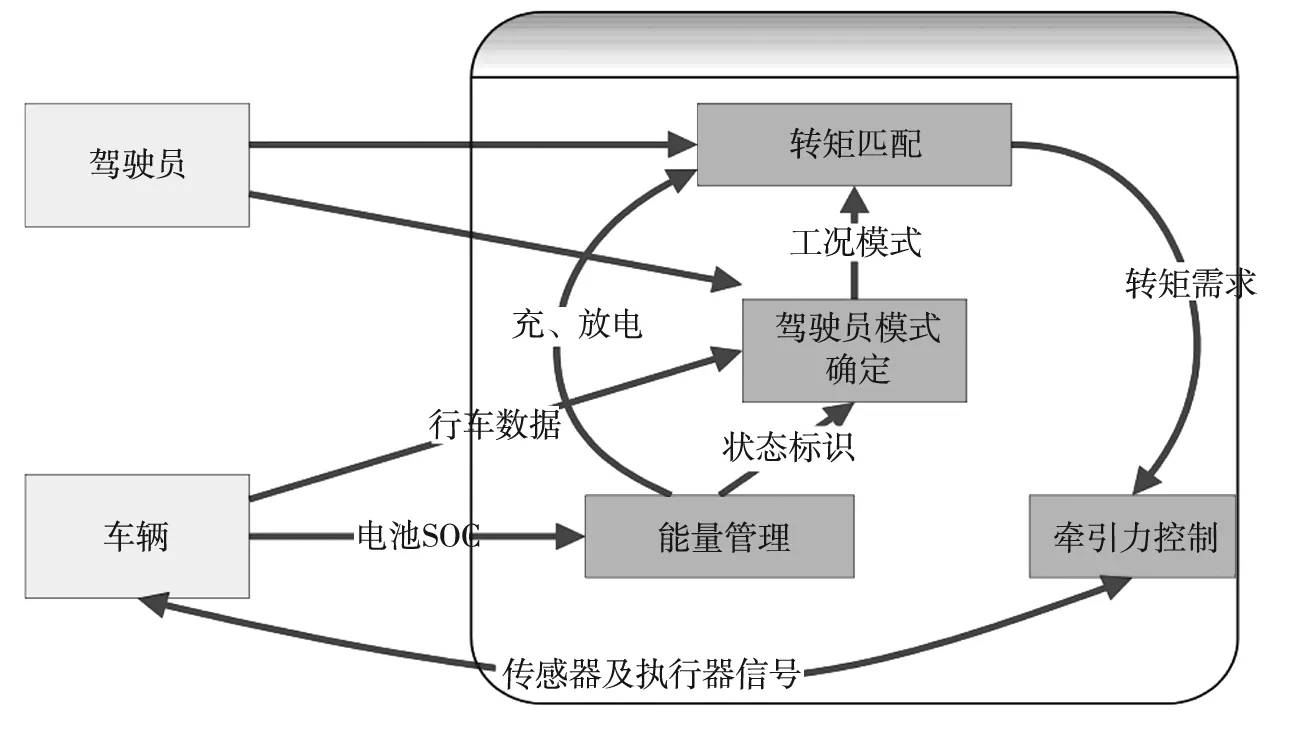
图1 混合动力整车控制器示意图
(3)驾驶模式确定
驾驶模式的确定依赖于车辆状态、能量管理信号和驾驶员输入.通过逻辑公式和参考值的方式给出驾驶模式的决策规则,以基础门限值逻辑作为高阶策略的基础,其模式状态影响牵引转矩的分配.
(4)牵引力控制
除了发动机和电机转矩的控制,牵引力还包含制动力控制、协调机械制动与再生制动的比例关系,以避免完全使用再生制动无法满足减速需求或出现制动力过大的现象.
3车体动力学模型
依据车辆动力学模型[2]进行力学计算.
Ft=Fb+Fair+Fslope+Froll.
机械制动力Fb可以简化为制动踏板的函数,Fb=Pedbrake×Fbmax;其中,Pedbrake为制动系统转换系数,Fbmax为最大制动踏板力.
空气阻力Fair可以简化为车速的函数,Fair=0.5ρairACDν2,其中,CD为空气阻力系数,A为车辆迎风面积,Pair为空气密度,ν为车辆与空气的相对运动速度.
坡度阻力Fslope可以简化为Fslope=mgsinα,其中,α为坡度.
转向阻力Froll可以简化为Froll=mg ftyrecosα,其中,ftyre为轮胎的摩擦系统,α为转向角.
式中,a为车辆行驶加速度,Rw为轮胎半径,Iw为车轮的转动惯量,If为飞轮的转动惯量,i0为主减速器传动比.输出转矩为Tout=(Ft+Fa)Rw.
将各公式代入得:
Tout=(Pedbrake×Fbmax+0.5ρairACDν2+mgsinα+mgftyrecosα+δma)×Rw.
4电池模型
电池是电气系统的动力源,具有机理复杂、使用状态多变、影响因素多等特点,建立仿真度高的模型难度较大.因此,本文采用Rint(电池等效电路)模型,将电池简化为开路电源,把电池工作看作充放电的过程,设定充电电流(电机发电)为正,放电电流(电机做功)为负.如图2所示.
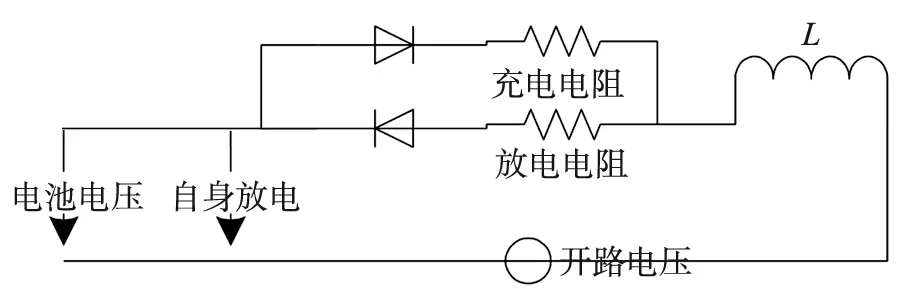
图2 电池简化电路
简化后电池系统的影响参数为充电电阻、放电电阻、电感和开路电压.而充电电阻、放电电阻和开路电压都与电池温度及SOC值有关.
开路电压VOC=V(SOC,Tbatt),

通过这两个公式可以将充电、放电电阻和开路电压表示成实验经验MAP.电池输出电压由下式计算:
式中,L为电感,单位为H;IMotor为电机电流,单位为A;ILoad为负载等效电流,单位为A.
仿真模型中,电池的开路电压可以通过标定直接输入.
考虑电池自身的能量损失(将电能转换成热能,和外界发生热交换),可以把自身放电电流看作与温度相关的曲线,有Iself=f(Tbatt).
求解功率平衡方程有:

式中,A为电池模块总面积,单位为m2;h为空气导热系数,单位为W/(m·K);m为空气流量,单位为m3/s;ρ为空气密度,单位为kg/m3.
5驾驶员模型
用控制器控制加速踏板、制动踏板、离合器踏板来模拟驾驶员控制时的驾驶状态,控制车辆按照驾驶循环要求跟随驾驶循环工况输出控制信号.油门踏板、制动踏板在模型中同一时间只有一个触发.驾驶员模型分为反馈、前馈两个控制环节.
(1)反馈控制
采用增量式PID(proportion integral derivative)控制以跟踪设定的驾驶循环,使仿真所得的实际车速与驾驶循环目标车速之间尽可能接近.增量式PID的输出为控制量的增量Δu(k),而不是对应执行机构的实际位置.控制量增量可用算式u(k)=u(k-1)+Δu(k)来表示.
增量式PID的控制算式为:
Δu(k)=u(k)-u(k-1)=KPΔe(k)+Kie(k)+kd[Δe(k)-Δe(k-1)].
式中,Δe(k)=e(k)-e(k-1).
进一步可以改写成:
Δu(k)=Ae(k)-Be(k-1)+Ce(k-2).

相比位置式算法,增量式算法的计算公式无需累加;输出为控制增量,即执行机构位置的变化量,故障时影响很小;手动切入自动时冲击小.
增量式PID控制算法以车速为跟随目标,用两个独立的增量式PID分别控制加速踏板和制动踏板.在数学算法的逻辑实现中,积分项使用积分器完成.为了防止积分器溢出,在启车过程、准备加速和制动踏板使能的状态下,加速踏板积分器重置;同理,当需求车速比当前车速大很多或在加速踏板使能状态下,制动踏板积分器重置.
(2)前馈控制
根据目标转速、目标加速度及由车体动力学计算得到的轮上阻力转矩,计算系统所需的传动轴输出端需求转矩.利用发动机转速转矩MAP反查加速踏板位置.使用需求转矩作为输入,与系统制动转矩作差.当制动转矩大于需求转矩时,根据差值反查制动踏板位置.
前馈和反馈控制器提供加速踏板和制动踏板的位置.由此产生的加速和制动踏板的位置被计算为两个控制信号的总和.在某些情况下,可能出现两个踏板都有值的现象,当出现这种情况时,若判断前馈加速踏板有值,则使能加速踏板;若前馈加速踏板为零,则根据需求加速值确定加速或者制动[3].
本模型提供人机交互接口,支持人为直接控制各踏板,或将实车试验过程中记录的油门踏板、制动踏板和换档等驾驶信息输入驾驶员模型.
参考文献:
[1]余志生.汽车理论[M].北京:机械工业出版社,1999:23-40.
[2]白凤良,杨建国,杜传进.混合动力电动汽车电动机仿真建模与分析[J].武汉理工大学学报,2003,27(5):606-609.
[3]孙文凯.并联混合动力汽车系统建模与转矩动态控制的仿真研究[D].武汉:武汉科技大学,2009.
责任编辑:金欣
Diesel electric hybrid vehicle and the related modeling
LIANG Jian-wei
(Department of Mechanics and Electrics, Shijiazhuang Vocational Technology Institute, Shijiazhuang, Hebei 050081, China)
Abstract:By means of real-time workshop (RTW), a model of diesel electric hybrid vehicle is set up for the controller, battery, vehicle body and driver, whereby the controller includes energy management, torque distribution, driving model and traction control. Battery model uses Rint, and vehicle body is established according to dynamics. Driver model is divided into feed forward and feedback controls.
Key words:diesel electric hybrid system; modeling; simulation
收稿日期:2016-03-04
基金项目:2015年度河北省科技计划项目(15212214)
作者简介:梁建伟(1980-),男,河北石家庄人,石家庄职业技术学院讲师.
文章编号:1009-4873(2016)02-0023-03
中图分类号:U463.2
文献标志码:A
