基于STC15F408AD单片机的机械手控制器设计
2016-06-15刘焕平侯立峰
刘焕平, 侯立峰
( 石家庄职业技术学院 机电工程系,河北 石家庄 050081)
基于STC15F408AD单片机的机械手控制器设计
刘焕平,侯立峰
( 石家庄职业技术学院 机电工程系,河北 石家庄050081)
摘要:以亚龙YL-G001型双轴机械手为控制对象,设计了基于STC15F408AD型单片机的机械手控制器,该控制器由输入电路、输出电路、微控制器、电源模块和RS-232通信模块组成,通过程序设计可以实现对机械手各种动作的控制.
关键词:单片机;机械手;控制器
随着工业技术的不断发展,大量的新型制造设备在实际生产中不断涌现.工业机械手作为一种先进的制造设备在生产领域得到了广泛应用.工业中大量的生产活动存在着不便于人工操作的环节,特别是在工作环境较危险的情况下,如果使用机械手则可以增加安全性,节约损耗,提高效率.亚龙YL-G001型双轴机械手是众多机械手控制器中的一种,结构设计合理,简单易学,特别适合于初学者[1].本文以亚龙YL-G001型双轴机械手为控制对象,设计了一种基于STC15F408AD型单片机的机械手控制器.
1YL-G001型双轴机械手的主体结构
YL-G001型双轴机械手的结构如图1所示.其主体包括机械臂和手爪部分、直流电机和丝杠部分、气动装置和电气部分,除此之外还有各种检测用传感器.机械臂和手爪部分完成物料的搬运和抓取工作,通过控制直流电机的正反转,可以实现机械臂沿丝杠做水平方向运动到达指定位置的目的,通过气动装置可以实现机械臂的升降和手爪的抓取动作.通过控制气缸1可以控制机械臂的升降,通过控制气缸2可以控制手爪的抓紧和松开动作.检测用传感器部分包括行程开关、光纤传感器和智能传感器.行程开关安装在机械臂水平运动的轨道上,用于检测机械臂是否到达工位1、工位2、工位3的位置;手爪上安装有光电传感器,用于进行手爪上有无料的检测;智能传感器安装在物料检测位,用于对物料检测位进行有无物料、物料特性的检测[2].
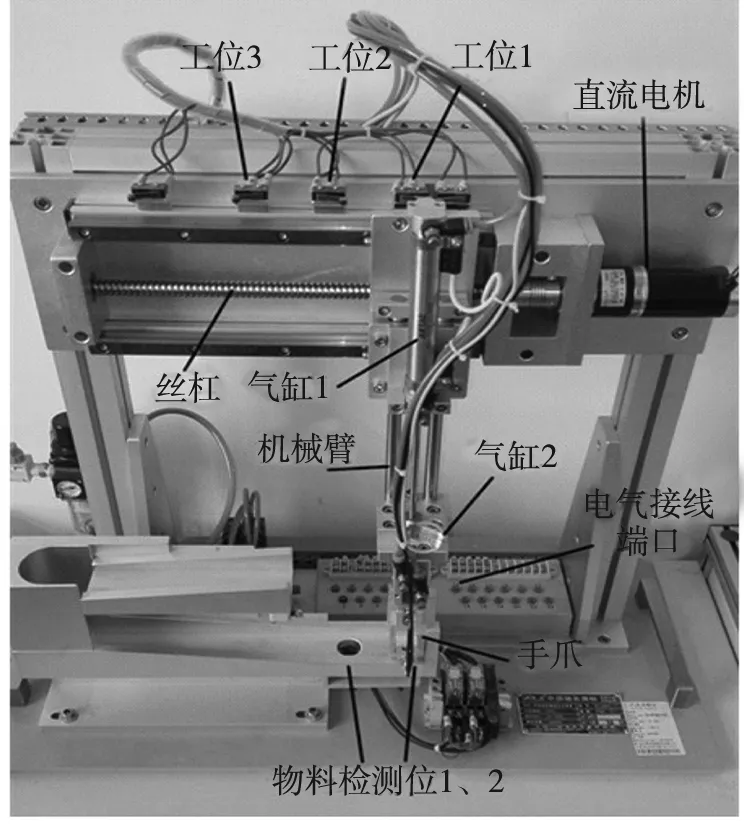
图1 YL-G001型双轴机械手主体结构
YL-G001型双轴机械手的电气接线端口的端子接线图如图2所示.
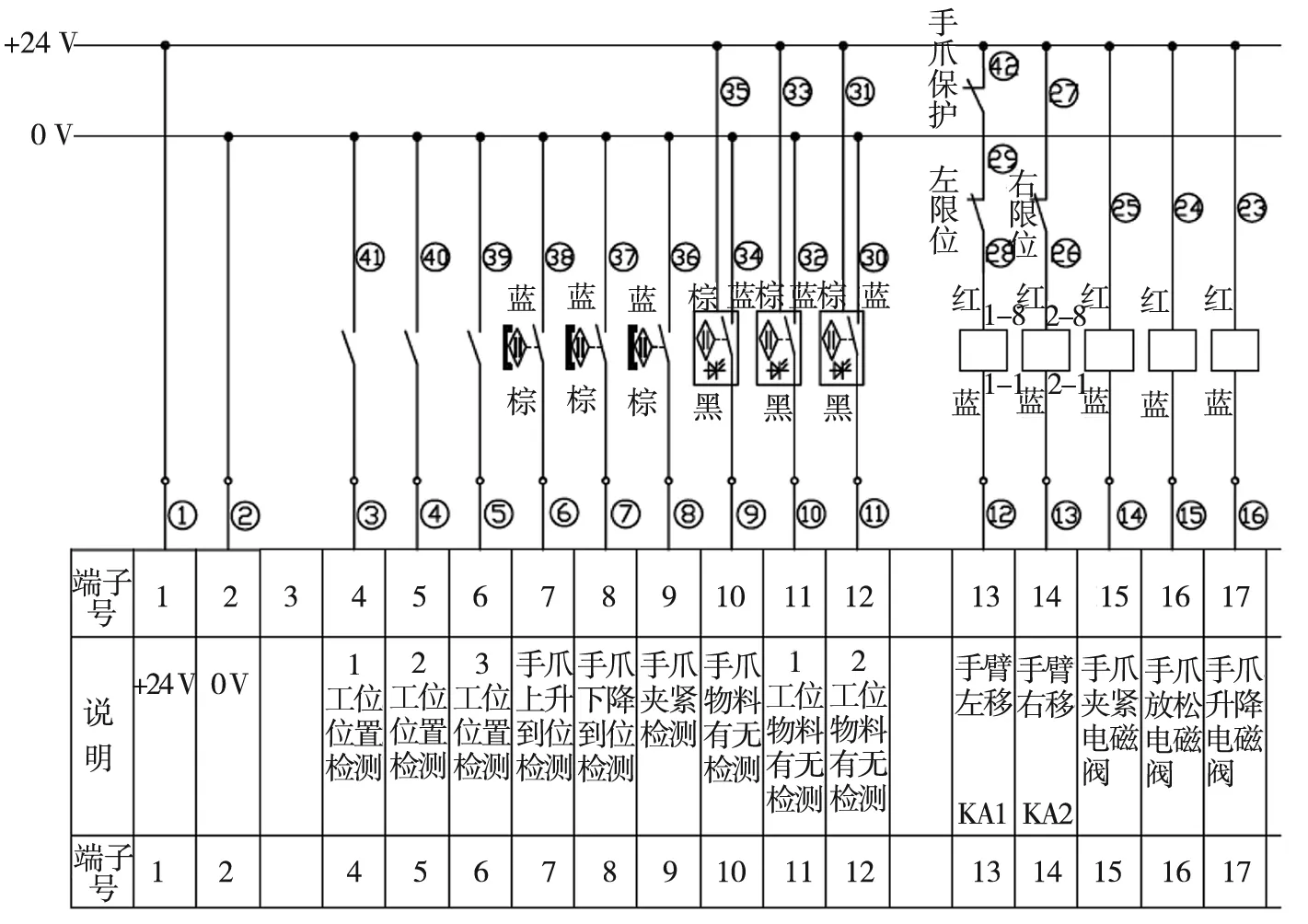
图2 YL-G001型双轴机械手端子接线图
2控制器总体设计方案
机械手控制器的组成框图如图3所示.机械手控制器由输入电路、输出电路、微控制器、电源模块和RS-232通信模块组成.本设计中的微控制器选用STC15F408AD单片机.输入电路主要由光耦和输入端子排组成,光耦可以起到稳定电压和隔离的作用.输出电路主要由继电器和输出端子排组成,单片机通过控制继电器的通断达到控制输出的目的.电源模块接收来自外部电源的信号,输出稳定的电压信号,避免控制器受到外界信号的冲击.RS-232通信模块既可以实现控制器与其他外部设备之间的串行通信,又可以完成单片机程序的下载和烧写.控制器的输入端子排和输出端子排与机械手控制器的电气接线端子相连.在使用控制器控制机械手之前,需要首先完成机械手电气接线端子与控制器输入端子、输出端子的硬件连接.

图3 机械手控制器的组成框图
3控制器的设计
3.1硬件设计
控制器的电路原理如图4所示.图4中,STC15F408AD是宏晶科技生产的高性能单片机,其处理速度比普通8051快8~12倍,工作电压5.5~2.4V,包括26个I/O端口,设有8 k字节片内Flash程序存储器,可擦写10万次以上,内部集成高精度R/C时钟,时钟频率为5~35 MHz.G1-G10是10个光耦,型号为EL817.EL817型光耦体积小,隔绝能力强,隔离电压可达到5000 V/ms.J1-J5是继电器,型号为JQC-3FF 24VDC-1zs,该继电器触点在125 V AC时,可开关12 A的负载.IN1和IN2为输入端子排,共有10个端子,OUT为输出端子排,共有5个端子.L15是电源工作状态指示灯,L17-L21是5个输出端子指示灯,L1-L10是10个输入端子指示灯,当指示灯亮时说明对应部件处于工作状态.AP1501是开关型直流-直流(DC/DC)变换器,其内部集成有频率补偿发生器,开关频率为150 kHz,输出电压范围为1.23~37 V,具有热关断和限流保护功能,输出负载电流最大为5 A.MAX202实现单片机的TTL电平与RS-232串行通信接口信号电平的转换.
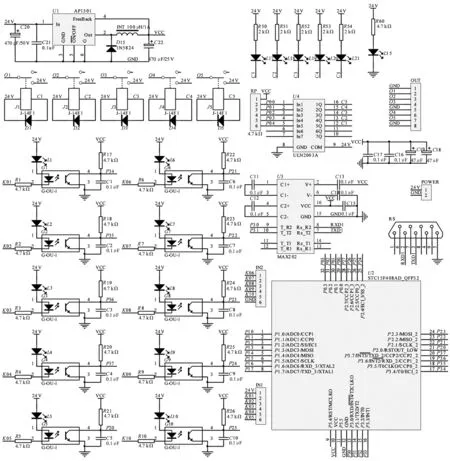
图4 控制器的电路原理图
3.2软件设计实例分析
3.2.1任务描述
将物料小球从工位1对应的位置处抓取,运送到物料台上与工位3对应的位置处,并放置小球,然后返回到工位1对应的位置处抓取下一个小球,反复重复此过程.
3.2.2硬件资源分配
在进行程序设计前,需要对机械手上的电气接线端子与控制器的输入端子、输出端子进行连接,这种连接没有固定的规则,只要输入端子对应连接,输出端子对应连接即可.之后,列出端子分配表,以便于编程.表1就是按照实际的端子连线图列出的端子分配表.
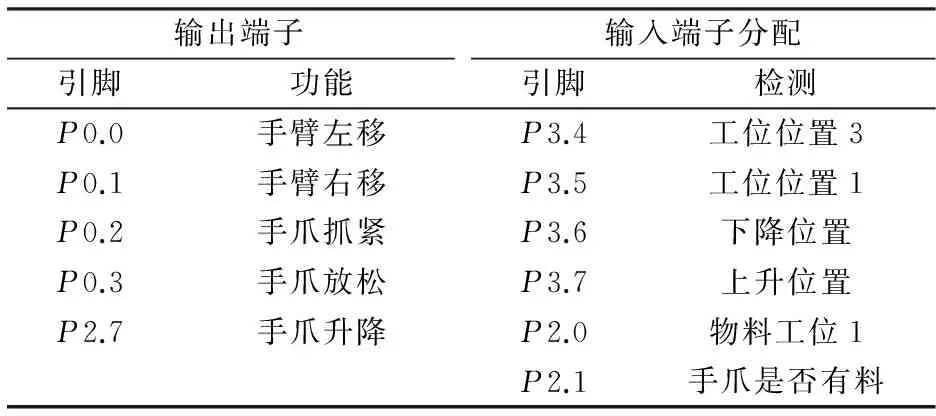
表1 端子分配表
3.2.3程序设计
通过程序可以实现对机械手各种动作的控制,如升降、抓取、放置、移动.在编写程序的过程中,尤其要注意判断夹取物料工位和放置物料工位的位置信息.根据本任务要求,程序设计流程如图5所示.
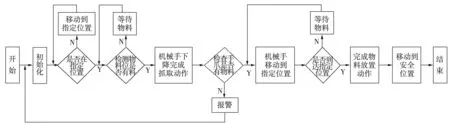
图5 程序流程图
4结语
该控制器虽然以亚龙YL-G001型双轴机械手为控制对象,但同样适用于多种类型的机械手.通过对控制器进行编程可以灵活控制机械手的动作,该控制器性能稳定,可以实现对机械臂和手抓部分的精确控制.
参考文献:
[1]刘焕平.单片机原理及应用[M].北京:北京邮电大学出版社,2008:139-141.
[2]浙江亚龙教育装备股份有限公司.亚龙YL-G001型智能物料搬运装置[EB/OL].(2014-06-25)[ 2015-12-20].http://www.caigou.com.cn/c476/product_1904091.shtml#.
责任编辑:吴瑞红
Designing of the industrial robot arm controller by STC15F408AD MCU
LIU Huan-ping,HOU Li-feng
(Department of Mechanics and Electrics, Shijiazhuang Vocational Technology Institute, Shijiazhuang, Hebei 050081, China)
Abstract:Industrial robot arm is widely used in industrial production field as a typical electromechanical integration equipment to accomplish such works as grasping, handling and placing materials. The designing of YL-G001 industrial robot arm is reasonable and easy to learn, and STC15F408AD acts as the basis for designing of the controller of YL-G001 industrial robot arm.
Key words:MCU; industrial robot arm; controller
收稿日期:2016-01-04
基金项目:2015年度石家庄职业技术学院院长基金课题(15YY1001)
作者简介:刘焕平(1965-),女,河北丰润人,石家庄职业技术学院教授.
文章编号:1009-4873(2016)02-0026-04
中图分类号:TP241
文献标志码:A
