活动发射平台大摆杆机械结构与液压系统联合仿真研究
2016-06-05黄彦文高星斗
张 平,黄彦文,高星斗,李 敏
活动发射平台大摆杆机械结构与液压系统联合仿真研究
张 平,黄彦文,高星斗,李 敏
(北京航天发射技术研究所,北京,100076)
大摆杆是活动发射平台重要的组成部分,当摆杆快速摆开时,如果发生急停情况,将会对大摆杆液压缸及其管路、大摆杆结构及安装的连接器产生较大的冲击载荷。基于ADAMS和AMESim联合仿真的方法对活动发射平台大摆杆的运动过程进行仿真,主要分析急停工况下大摆杆上不同位置的角速度和角加速度,为大摆杆的设计和试验提供指导。
活动发射平台;摆杆;联合仿真
0 引 言
大摆杆是活动发射平台的重要组成部分,在技术中心配合箭体安装,承载加注管路、供气管路和电缆等,在技术中心到发射中心的垂直运输途中保持连接器、供气管路及电缆状态不变,在发射中心临射前带动脱落的连接器及管路摆开,为火箭起飞让出安全通道。
大摆杆所承担的工作是其他任何设备所不能代替的,特别是在临近发射前的短暂时间内,所有人员、车辆都已撤离发射场,只有摆杆矗立在发射场,支撑着有关的电缆及管道与火箭相连。因此,大摆杆对火箭发射的成败有极其重要的影响,其工作必须保证绝对安全可靠。
当大摆杆接近火箭时,不能与火箭相碰撞,当要求其离开火箭时,必须保证准时按要求的速度、距离离开,不能有任何差错,否则后果不堪设想[1]。为确保大摆杆性能满足使用要求,在设计过程中,需要开展一系列的计算、仿真和试验工作。
大摆杆系统是集机电液一体化的大型机械系统,对其进行动力学研究涉及机械、液压及电控等领域的耦合,在建立模型时必须充分考虑机械及液压系统之间的耦合效应,建立完整的闭环模型,从而提高分析精度,真正满足工程需求[2,3]。
1 仿真工况及建模过程
1.1 仿真工况
大摆杆在工作中存在主动急停和故障急停工况。主动急停用于在技术中心某一角度摆开和摆回时、在发射中心慢速摆开和摆回时遇到异常情况需要将摆杆止动;故障急停则是由于大摆杆系统液压、电控、结构部分出现故障而发生的急停情况。
当摆杆快速摆开时,如果发生急停情况,将会对大摆杆液压缸及其管路、大摆杆结构及安装的连接器产生较大的冲击载荷。通过仿真,可获取大摆杆系统在急停工况下的加速度,为大摆杆结构强度的校核提供输入;可获取不同液压系统方案下的大摆杆动态响应结果,为优化液压系统方案设计提供依据;同时,可对大摆杆样机的各种试验工况结果进行预示,优化传感器布置方案,节约试验成本。
本文对活动发射平台大摆杆的急停工况进行仿真研究,包括大摆杆液压系统中的电磁换向阀断电和流量阀断电两种状态。
1.2 建模过程
1.2.1 机械系统建模
在ADAMS软件中建立大摆杆的机械系统模型,主要包括摆杆、主轴、齿轮、齿条、活塞杆和缸筒,如图1所示。

图1 机械系统模型
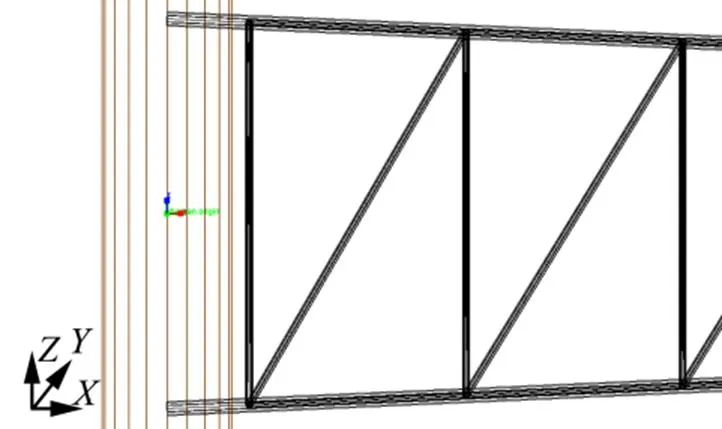
图2 总体坐标系示意
连接关系如下:摆杆与主轴固接,齿轮与主轴固接,主轴与大地用转动副约束,齿轮与齿条之间建立齿轮副,活塞杆与齿条固接,活塞杆与缸筒之间用滑动副约束。
活塞杆与缸筒之间创建作用力,其值从AMESim液压系统模型中获取;创建状态变量测量活塞杆与缸筒间的位移、速度和摆杆摆动角度。
考虑摆杆的柔性,利用ANSYS软件生成模态中性文件,导入ADAMS后的模型如图3所示[4]。
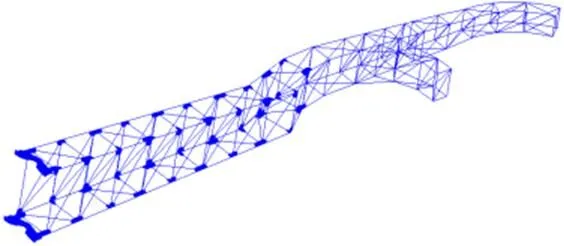
图3 大摆杆柔性体模型
1.2.2 液压系统建模
在AEMSim中建立液压系统模型。急停工况模型如图4所示。电磁换向阀和流量阀断电由信号源模块输出的信号实现[5,6]。
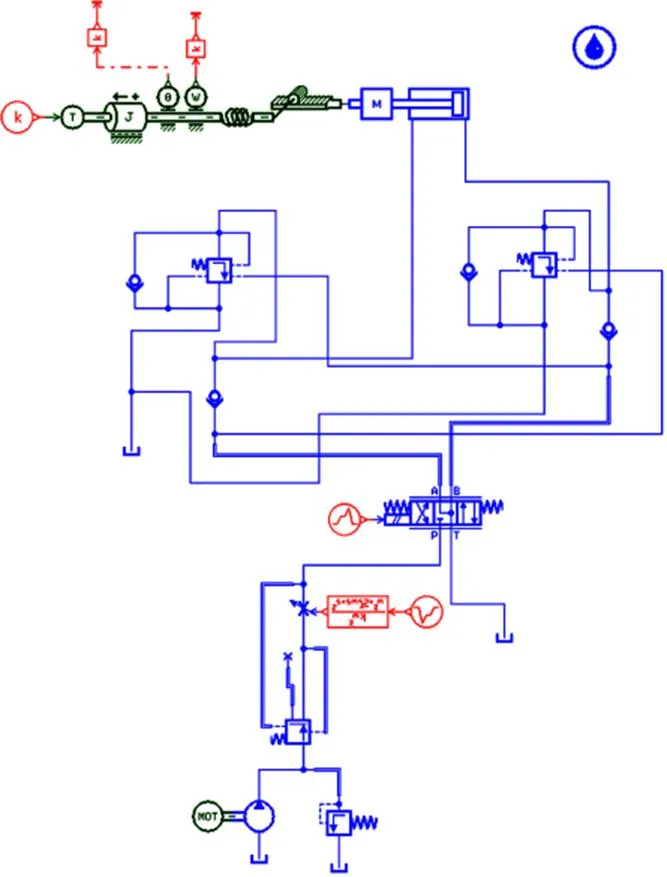
图4 急停工况模型
1.2.3 联合仿真模型
急停工况的联合仿真模型如图5所示[7,8]。

图5 急停工况联合仿真模型
2 仿真参数设定
机械系统主要仿真参数为大摆杆杆系、管路、电缆、连接器和连接器支架等机械结构的质量特性参数,按实际状态输入软件中;液压系统参数根据设计的流量参数输入到软件中,一般为流量随时间变化的曲线。
通过AMESim软件中信号库里的相关模块,实现液压系统电磁换向阀断电和比例流量阀断电2种急停工况的模拟。
3 仿真结果
对急停工况下的仿真结果进行分析,重点关注大摆杆不同位置(如图6中A、B、C、D点位置)的角速度和角加速度。

图6 大摆杆关注位置点
3.1 电磁换向阀断电
电磁换向阀断电时,角速度和角加速度仿真结果(以D点为例)分别如图7、图8所示。在=15 s时,电磁换向阀断电。
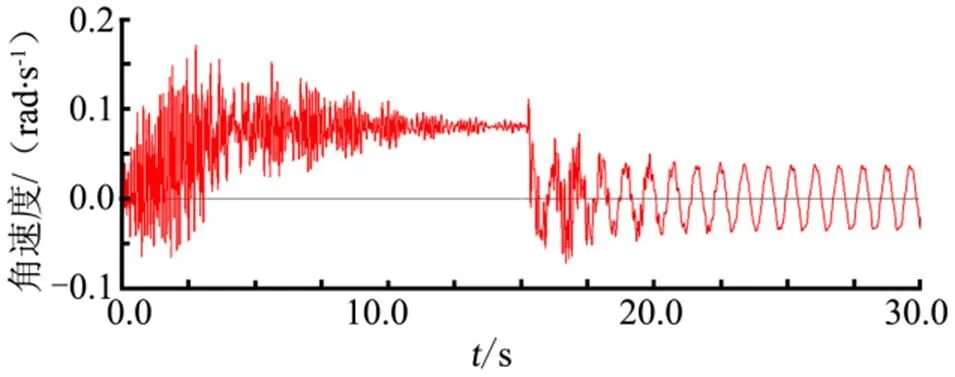
图7 角速度曲线
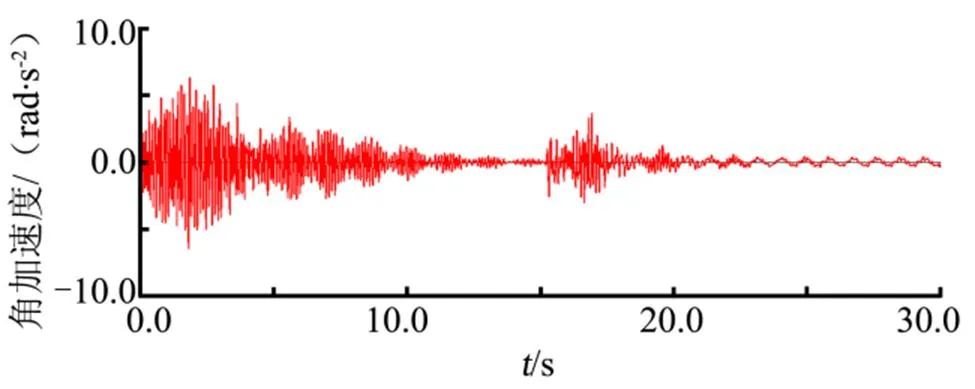
图8 角加速度曲线
3.2 流量阀断电
流量阀断电时,角速度和角加速度仿真结果(以D点为例)分别如图9、图10所示。在=15 s时,流量阀断电。
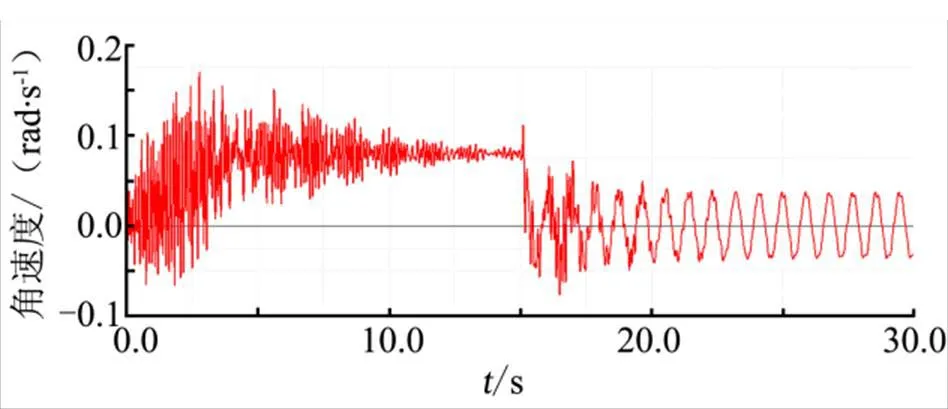
图9 角速度曲线
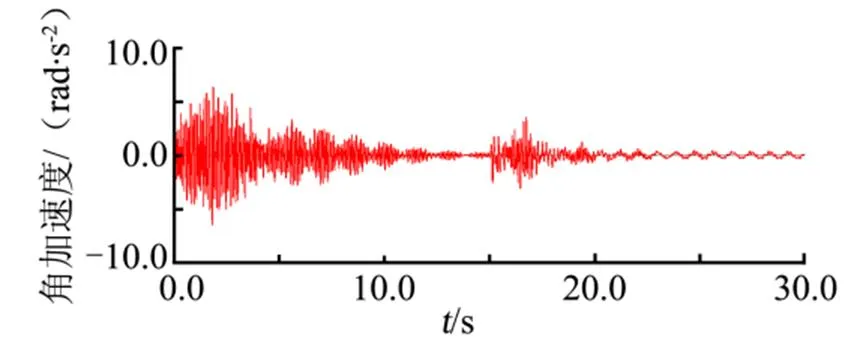
图10 角加速度曲线
4 结 论
活动发射平台大摆杆结构与液压系统联合仿真涉及机械系统模型简化、液压系统建模,以及机械、液压系统仿真参数的合理选取。
柔性体模型中C、D两点因靠近摆杆末端,急停工况时角加速度值较大,B点接近摆杆质心位置,仿真结果与采用纯刚体模型仿真结果接近。在结构强度分析时,可采用柔性体模型B点仿真结果。
在条件允许的前提下可针对大摆杆试验状态进行仿真分析,在试验系统中布置相应的传感器,将仿真结果与试验数据进行对比,并根据试验数据不断完善仿真模型。
[1] 路广勋, 李建增, 王东锋. 航天发射塔摆杆健康状态评估指标体系的研究[J]. 计算机测量与控制, 2014, 22(2): 155-157.
[2] 周杰, 马吉胜, 等. 某型兵器发射塔架摆杆系统机液耦合动力学仿真研究[J]. 机床与液压, 2014(7):148-150, 154.
[3] 孙中兴, 唐力伟, 周杰, 等. 某塔架摆杆系统水平杆动力学建模与分析[J]. 机械设计, 2015(3): 90-94
[4] 康宁民, 王焕功, 等. 有限元分析在电缆摆杆动载荷分析中的应用[J]. 制造业信息化, 2014(7): 139-140
[5] 庞末红, 杨伦奎, 陈成峰. 基于AMESim的电磁阀动态响应特性仿真研究[J]. 导弹与航天运载技术, 2015(5): 83-88
[6] 陈亮, 梁国柱. 基于AMESim的电磁阀工作过程动态特性建模与仿真[J].导弹与航天运载技术, 2014(3): 49-54
[7] 姜立标, 程铖, 等. 基于ADAMS和AMESim机液联合仿真的电动轮矿用车转向机构动力学研究[J]. 机床与液压, 2015(2): 171-174
[8] 韩寿松, 晁智强, 等. 基于ADAMS和AMESim的液压六自由度平台联合仿真研究[J]. 机床与液压, 2013(5): 157-159.
Research of Mechanical Structure and Hydraulic System Co-simulation of Cable Moving Truss on Mobile Launching Platform
Zhang Ping, Huang Yan-wen, Gao Xing-dou, Li Min
(Beijing Institute of Space Launch Technology, Beijing, 100076)
Cable moving truss was an important part of mobile launch platform. If the truss stops suddenly in rapid moving process, there will be great shock load on cylinders, pipelines, structures and connectors. Moving process of mobile launch platform cable moving truss was simulated based on the method of ADAMS and AMESim co-simulation. Under emergency stop conditions, angular velocity and acceleration in different positions of cable moving truss was analyzed. This study supported the design and test of cable moving truss.
Mobile launch platform; Cable moving truss; Co-simulation
1004-7182(2016)03-0033-03
10.7654/j.issn.1004-7182.20160308
V553.1
A
2015-08-24;
2015-12-04
张 平(1982-),男,高级工程师,主要研究方向为发射总体技术
