半主动悬架系统滑模控制动力学仿真研究
2016-06-02陈克,张明
陈 克,张 明
(沈阳理工大学 汽车与交通学院,沈阳 110159)
半主动悬架系统滑模控制动力学仿真研究
陈克,张明
(沈阳理工大学 汽车与交通学院,沈阳 110159)
摘要:建立1/4半主动悬架系统模型,采用天棚阻尼悬架系统模型作为参考模型,基于滑模变结构控制策略,设计滑模控制器。运用Matlab/Simulink进行动力学仿真分析,研究系统在随机路面激励下的车身垂直加速度、悬架动挠度的性能变化。仿真结果表明,该滑模控制器性能稳定,能有效控制、改善悬架系统各性能参数。
关键词:半主动悬架;滑模控制;动力学仿真
根据性能和结构特点,车辆悬架系统可以分为三大类:被动悬架、全主动悬架和可调节的半主动悬架[1]。被动悬架系统是指传统的悬架系统,其刚度和阻尼确定后将保持不变,也不能调节,使车辆的乘适性和操纵稳定性得不到保障。全主动悬架系统响应速度快,能耗大,系统结构复杂,需要较多的传感器,一般成本较高,仅使用在高档轿车和豪华客车上。半主动悬架结构简单,工作时采用可调阻尼减振器,能根据运动状态不断调节阻尼大小,其减振性能相当于被动悬架在各个频率上的优化值,因而减振效果好,且几乎不需要能量消耗[2]。
研究半主动悬架系统,控制技术是其中的一个关键问题。近年来,国内外学者应用控制理论提供的方法在汽车半主动悬架控制系统方面做了大量研究[3-4],其中滑模变结构控制策略渐渐成为研究讨论的热点。滑模变结构控制实质上是极特别的非线性控制,其特别之处通常指的是它处于不连续的控制状态,没有特定的系统“结构”,无论是偏差或其各阶导数,能够在变化过程中按照系统实时情况有方向地不停运动,促成系统遵循以前规定的“滑模动态”状态轨迹进行变化。因此滑模变结构控制具有响应快速、对参数和扰动反应不活跃、不用系统实时在线进行识别、易物理实现且鲁棒性高等优点[5]。本文以实现半主动悬架系统的主动控制为目标,建立1/4悬架系统模型,以天棚阻尼系统作为参考模型,依据滑模变结构控制理论,设计滑模变结构控制器,通过Matlab/Simulink进行仿真,对比分析、验证滑模控制器的有效性。
1悬架动力学模型建立
1.1半主动悬架系统动力学模型
选取1/4车辆半主动悬架系统模型为控制对象。由图1可得系统动力学方程:
(1)
式中:m1为非簧载质量;m2为簧载质量;k1为悬架刚度;k2为轮胎刚度;z1、z2、q分别为非簧载质量的位移、簧载质量的位移和路面不平度输入;c为阻尼减振器的阻尼系数;U为阻尼控制力;(z2-z1)为悬架动挠度;(z1-q)为车轮的动位移。
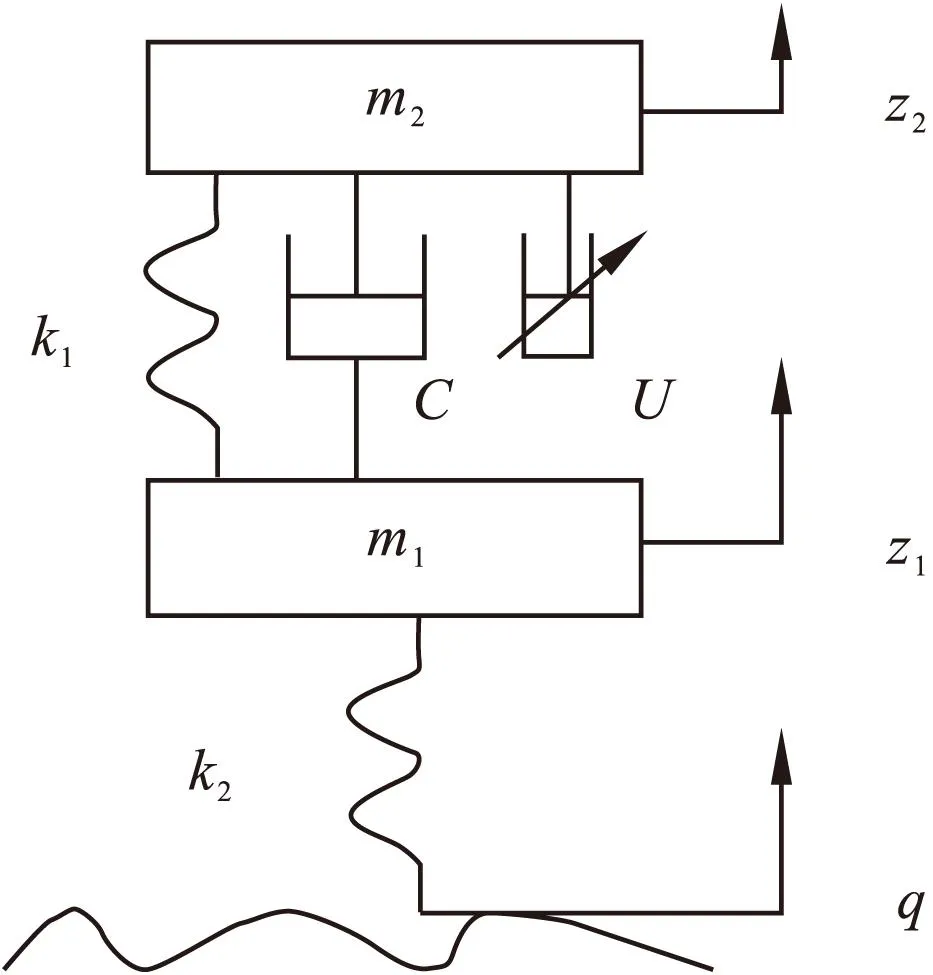
图1 1/4半主动悬架系统模型
选取系统的状态变量:
(2)
输出变量:
(3)
则状态方程:

Y=HX
(4)
式中:

1.2参考模型
采用天棚阻尼悬架系统作为参考模型,如图2所示,可得系统动力学方程:
(5)
式中:csr、ctr为天棚阻尼悬架系统的减振器阻尼;z1r、z2r分别为天棚阻尼悬架系统的非簧载质量的位移、簧载质量的位移。

图2 天棚阻尼悬架系统模型
状态变量:
(6)
状态方程为
(7)
式中:

2滑模控制器的设计
为研究阻尼对悬架系统性能的影响,采用天棚阻尼系统作为滑模变结构控制器的参考模型,定义半主动悬架系统与天棚阻尼系统之间的误差矢量e为车身质量位移误差、车身质量速度误差、位移误差的积分,可表示为
(8)
于是可得到误差动力学方程为
(9)
式中:X、Xr分别为半主动悬架系统、天棚阻尼系统选取的状态变量;




采用极点配置法为滑模变结构控制系统选取的切换超平面为:s=Re,其中R=[1,c2,c3]。
为使滑模运动逐渐稳定的同时还具有优秀的运动品质,根据系统的稳定性条件,有二次方程R(s)=c3+c2s+s2的全部根都在s平面的左平面内,取值为R=[1,4,8]。

(10)
在满足广义滑模条件的前提下,采用指数趋近率来改善滑模的运动品质,可得

(11)
将式(9)代入式(10)可得阻尼控制力U为
U=(RGw)-1[R(Awe+BwX+HwXr)+εsgn(s)+ks]
(12)

3仿真分析
为检验所设计的滑模控制器的主动控制性能,在Matlab/Simulink中进行动力学仿真分析,选择B级路面(路面不平度系数Gq(n0)=64×10-6m3,参考空间频率n0=0.1m-1)作为激励输入,图3为B级路面激励结果图。车速分别选为30km/h、50km/h、100km/h,选取大客车参数如下:
m1=440kg;m2=750kg;k1=106980N/m;k2=1357000N/m;c=17796Ns/m;csr=23500Ns/m;ctr=17500Ns/m;ε=3。
在Matlab/Simulink环境下进行时域分析,可得到车辆的性能指标如图4~图9所示,即分别在车速为30km/h、50km/h、100km/h三种工况下,滑模控制器控制下的半主动悬架系统和被动悬架系统的车身垂直加速度、悬架动挠度对比分析曲线图。

图3 B级路面激励

图4 车速为30km/h车身垂直加速度

图5 车速为50km/h车身垂直加速度

图6 车速为100km/h车身垂直加速度

图7 车速为30km/h悬架动挠度

图8 车速为50km/h悬架动挠度

图9 车速为100km/h悬架动挠度
分析图4~图6和图7~图9可以看出在时速为30km/h、50km/h、100km/h三种工况下,滑模控制器都能明显的抑制车身垂直加速度、悬架动挠度。以车速为50km/h的仿真结果为例,进一步分析图5和图8仿真结果,不难看出,与被动悬架相比,滑模控制下的半主动悬架在车身垂直方向的加速度减小了20%~50%左右,滑模控制下的悬架的动挠度减小了30%~50%左右,滑模控制起到了明显的抑制作用,这将为车辆提供较好的乘适性,还使车辆在行驶过程中悬架撞击限位块的概率大大减小。
为进一步分析滑模控制器的控制效果,同样以车速为50km/h的仿真结果为例,在Matlab/Simulink中使用Powergui模块对各项性能指标进行频域上的幅频特性仿真分析,结果如图10和图11所示(“——”表示为被动悬架,“- - -”表示为滑模控制下的半主动悬架)。
文献[7]给出了五种基本共振频率范围如表1所示。

表1 五种基本的共振频率范围 Hz
结合表1,从图10分析得出,在频率范围1~15Hz,滑模控制下的车身垂直加速度的振动强度减小10%~25%左右,车身振动明显得到了抑制,这一频率范围正好包含了人体的共振频率范围4~12.5Hz,这说明滑模控制能够给车辆提供更好的乘适性,同时滑模控制在更低频率(1~3Hz)起到减弱振动强度的作用,还能有效防止车身共振。
从图11可以看出,在频率范围1~30Hz,与被动悬架相比,滑模控制下的悬架动挠度的振动强度减小了10%~45%,悬架振动得到明显抑制,这一频率范围几乎涵盖了人体内脏和脊椎系统的共振频率、车身共振频率、车轮跳动频率、悬置的发动机和变速器的共振频率。说明滑模控制器改善了车辆的乘适性,同时减小悬架与限位块相撞的概率,延长悬架的使用寿命。

图10 车身垂直加速度幅频特性分析

图11 悬架动挠度幅频特性分析
4结论
针对半主动悬架系统,基于参考模型设计了滑模控制器来控制半主动悬架系统的阻尼力,以实现其主动控制。时域仿真结果表明,与被动悬架系统相比,滑模变结构控制器控制的半主动悬架系统的车身垂直加速度、悬架动挠度都明显得到抑制,频域分析可知滑模变结构控制在中低频率范围内能有效减弱悬架各性能指标的振动强度,证明了所设计的滑模控制器能有效实现半主动悬架的主动控制,大大改善车辆的乘适性和安全性。
参考文献:
[1]王望予.汽车设计[M].北京:机械工业出版社,2004.
[2]方子帆,邓兆祥,翁建生.汽车磁流变半主动悬架的控制研究[J].中国公路学报,2006,19(2):106-110.
[3]陈双,宗长富,刘立国.主动悬架车辆平顺性和操纵稳定性协调控制的联合仿真[J].汽车工程,2012,34(9):791-797.
[4]A Hossain,A Rahman.Fuzzy Expert System For Controlling Swamp Terrain Intelligent Air-cushion Tracked Vehicle[J].International Journal of Automotive Technology,2011,12(5):745-753.
[5]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005.
[6]高为炳,程勉.变结构控制系统的品质控制[J].控制与决策,1989,4(4):1-6.
[7]Dave Crolla,喻凡.车辆动力学及其控制[M].北京:人民交通出版社,2004.
(责任编辑:赵丽琴)
Dynamics Simulation Study of Sliding Mode Control on Semi-active Suspension System
CHEN Ke,ZHANG Ming
(Shenyang Ligong University,Shenyang 110159,China)
Abstract:A 1/4 semi-active suspension system model is built,and taking the skyhook suspension system model as a reference model,based on sliding mode variable structure control strategy,a sliding mode controller is designed.Some dynamics simulation analysis is conducted by Matlab/Simulink.The variations of the performances of the body vertical acceleration and suspension deflection of the system are studied in random road excitation condition.Simulation results show that the performances of the sliding mode controller are stable,and the sliding mode controller can effectively control and improve the performance parameters of the suspension system.
Key words:semi-active suspension;sliding mode control;dynamic simulation
中图分类号:U463.1
文献标志码:A
文章编号:1003-1251(2016)02-0070-05
作者简介:陈克(1965—),男,教授,博士,研究方向:汽车动力学与控制。
收稿日期:2014-03-12
