一种机械手底座的结构改进与模态分析
2016-05-27张俊勇
张俊勇
(陕西国防工业职业技术学院 数控工程学院,陕西 西安 710300)
一种机械手底座的结构改进与模态分析
张俊勇
(陕西国防工业职业技术学院 数控工程学院,陕西 西安 710300)
摘要:设计了一种机械手结构,并针对其底座结构在长期频繁的使用中产生的磨损比较严重的问题进行了改进。通过增加支承结构,改变了底座和工作台的接触方式,从而有效地提高了其接触强度,增加了其结构刚度,减小了摩擦面积。结合ANSYS Workbench 14.0软件对该支承结构进行模态分析得出,在固有频率为290.13 Hz条件下应力和变形最大,应尽量避免在使用过程中承载载荷频率过低。为该结构的进一步调整和使用打下了基础。
关键词:机械手;结构改进;模态分析;ANSYS
随着工业生产逐渐朝着自动化、智能化和集成化方向发展,机械手的应用也逐渐广泛,特别在精密铸造、焊接、装配和搬运等场合已经逐渐常态化,其控制过程简单、生产效率高、加工精度高和生产成本低的优点,使得其在制造业领域占据了十分重要的地位,成为在国民经济中不可或缺的一环。《中国制造2025》将高档数控机床和机器人作为重要发展的领域[1]。
本文设计了一种机械手结构,在装配和使用的过程中表现良好,但是由于其底座结构处于机械臂回转结构中,在长期频繁的使用中产生的磨损比较严重,经过了多次润滑改造、密封改造以及更换材料后仍然会出现磨损的情况。为了改变这种情况,笔者从结构改进下手,增加支承结构,改变底座和工作台的直接接触,从而有效地提高了其接触强度,增加了其结构刚度,减小了摩擦面积,并结合ANSYS Workbench 14.0软件对其进行了模态分析,找出了应力和变形的最大位置,为该结构的进一步调整和使用打下了基础[2]。
1机械手结构设计
本文应用软件SolidWorks 2012对机械手进行三维实体建模,其结构如图1所示,共有6个自由度,可以完成任意位置的零件抓举、搬运,经过进一步改造后,还可以完成焊接、表面喷涂等加工工艺过程,具有良好的可操作性。其周向回转、第1关节处轴向摆动和整体结构支承全部依靠底座来完成,底座结构如图2所示。从图2中可以看出,整个机械手的质量全部由该底座承担,同时还要保证机械手在圆周方向的运动和第1关节处的轴向摆动,所以其磨损量是整个设备中最大的,通过多种方式的改进仍然无法改变其易磨损状态,如增加润滑装置,改用合金钢材料,改变密封环结构等多种措施,始终效果有限[3]。

图1 机械手三维模型

图2 机械手底座结构
2底座改进过程分析
若要减小其磨损应明确其成因,具体原因有如下几点:1)机械手整体结构过重,而该底座是整个设备的承压件,所以相当于增加了底座与工作台的接触应力;2)整个设备的周向运动即圆周方向的运动全部由该底座完成,同时其第1关节处的轴向运动也需要该底座来完成,频繁运动造成的结果也容易使其磨损;3)该底座两侧的耳板均为焊接结构,其结构刚度有限,所以这就限制了其材料的选择,应选择可焊性好的中碳钢或低合金钢材料,但这些材料的耐磨性较差;4)将原有的橡胶密封圈换成塑料材质密封圈,其密封性和使用效果均无法得到保证。
考虑在原有结构基础上增加1个支承座,改变其原来的接触状态,这样就可以在不改变其底座各项参数(包括外形结构、材料和尺寸等)的前提下,获得较好效果。支承座结构如图3所示[4]。通过加装支承座后,底座悬空,这样就可以减小底座与工作台的接触应力,减少底面摩擦;机械手的周向运动由原来的底座单一完成变成底座与支承座共同完成,也同样减少了底座内孔的磨损。为了验证其状态,笔者通过ANSYS软件进行分析来进一步验证[5]。
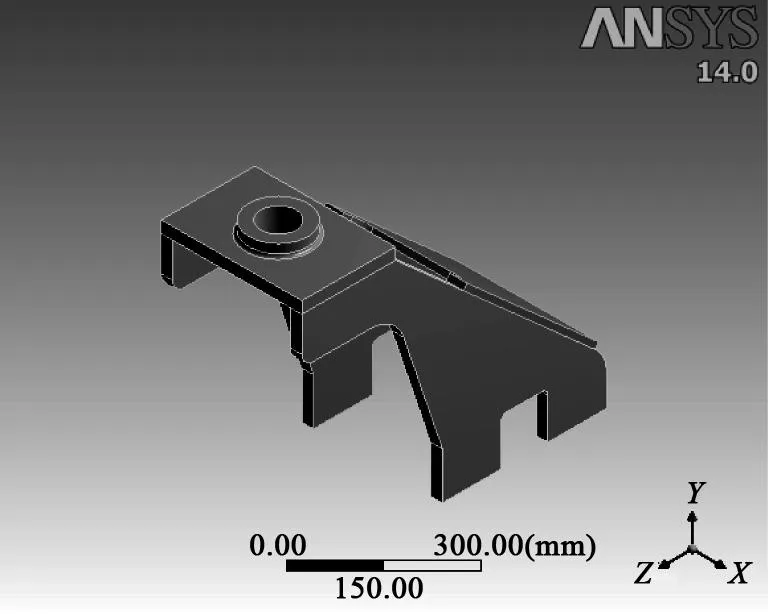
图3 支承座结构图
3支承座模态分析
3.1数据导入与模态分析
要求底面4个端面固定在卡槽中,上表面施加载荷幅值Fx=1 000 N,Fy=5 000 N,Fz=1 000 N,相位角φ=0°,应用SolidWorks软件构建三维模型,并导入到ANSYS软件中进行模态分析,导入过程如图4所示。进行模态分析得到其固有频率后,再进行谐响应分析找到共振点,明确共振频率下的应力和位移[6]。经过分析后,得出了六阶固有频率(见表1)。
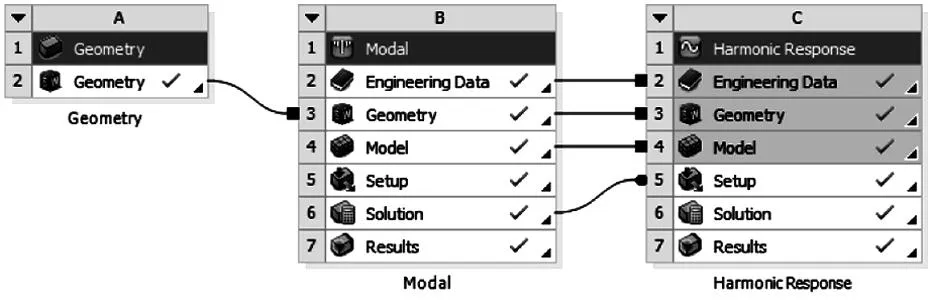
图4 创建模态分析和谐响应分析模块

模型阶数123456固有频率123.65290.13384.29472.85547.28745.69
3.2共振点频率与分析

图5 频率与变形关系
在Environment-Loads-Force模块下输入X=Z=1 000 N,Y=5 000 N,定位方向选择Y方向。选择该结构中上表面作为求解项,得出谐响应分析结果如图5所示[7]。由图5可以看出,Y方向有2个谐振频率,1阶谐振频率为290.13 Hz,2阶谐振频率为574.28 Hz。这说明在固有频率290.13 Hz和574.28 Hz时幅频数值较大,易引起共振,特别是在290.13 Hz时变形最大。下述将进一步分析290.13 Hz时的应力和变形。
3.3应力与变形
在“Total Deformation”中输入290.13,即可得出在290.13 Hz状态下的应力和变形数据。等效应力云图和变形云图[8]分别如图6和图7所示。
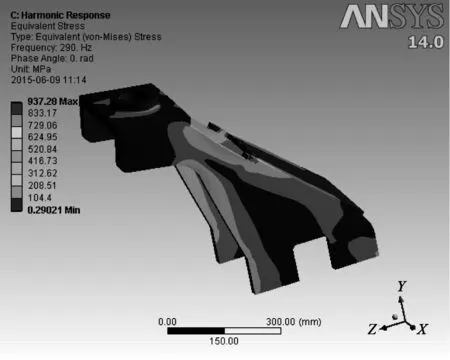
图6 等效应力云图
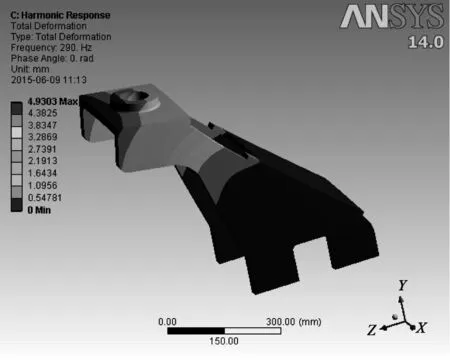
图7 变形云图
由图6和图7可以看出,低阶振型对稳定性有决定作用,所以应尽量避免在使用过程中承载载荷频率过低造成的变形、断裂、扭曲和磨损。
4结语
本文利用ANSYS Workbench软件对支承座进行了模态分析,并在模态分析的基础上进行了谐响应分析,找出了共振点,这为后期的装配使用提供了理论数据,后期将结合实际工况进行物理验证。
参考文献
[1] 田大龙,张保成,李瑰,等.基于ABAQUS的液压支架底座尺寸优化设计[J].煤矿机械,2015,36(5):13-15.
[2] 刘水平,杨寿智. 基于PLC与步进电机的教学型机械手系统设计[J].自动化技术与应用,2014(4):103-106.
[3] 刘江.ANSYS Workbench 14.5机械仿真实例讲解[M].北京:机械工业出版社,2015.
[4] Duk-jin K, Moon W M, Moller D, et al. Measurments of oceansurface waves and currents using L-and C-band along-track interferometric SAR[J]. IEEE Trans. Geosci. Remote Sensing(S0196-2892), 2003, 41(12):2821-2832.
[5] Romeiser R. Current measurements by airborne along-track InSAR:measuring technique and experimental results[J]. IEEE Trans. Geosci.Remote Sensing (S0196-2892), 2005, 30(3):552-569.
[6] 国思茗,李乃川,孙晶,等.遥操作机器人系统的稳定性研究[J].自动化技术与应用,2013(11):28-33.
[7] 荆忠亮,赵彤涌,宋志强.基于SolidWorks和Ansys Workbench的液压支架顶梁负载仿真分析[J].煤矿机械,2015,36(5):240-242.
[8] 童珍容,杨波,何继钏,等.基于ANSYSWorkbench加油泵的壳体应力分析[J].新技术新工艺,2014(8):89-90.
责任编辑郑练
The Improvement and Model Analysis based on the Structure of Manipulator Base
ZHANG Junyong
(Shaanxi Institute of Technology, Xi’an 710300, China)
Abstract:Design a manipulator structure, and its base structure in long-term frequent use of more serious wear and tear is improved. Through increasing the support structure, change the base and the workbench's contact way, so as to effectively improve the contact strength, increase the structure rigidity, reduce the friction area. Combined with ANSYS Workbench 14.0 software on the modal analysis, find out the stress and deformation of the largest position for further adjustment of the structure and the use of the foundation.
Key words:manipulator, the improved structure, the modal analysis, ANSYS
中图分类号:TP 23
文献标志码:A
收稿日期:2015-11-05
作者简介:张俊勇(1975-),男,硕士,副教授,主要从事机电一体化技术及教学等方面的研究。