一种改进的开关磁阻电机模糊自适应直接转矩控制
2016-05-25刘占千杨燕翔宋潇潇
刘占千, 唐 静, 杨燕翔, 王 军, 宋潇潇
(西华大学,成都 610039)
一种改进的开关磁阻电机模糊自适应直接转矩控制
刘占千, 唐 静, 杨燕翔, 王 军, 宋潇潇
(西华大学,成都 610039)
利用传统直接转矩控制技术,会导致开关磁阻电机稳态定子电流幅值大,电机铜耗增加。基于模糊自适应技术,研究了一种磁链自适应直接转矩控制方法,通过建立给定定子磁链与转速之间的联系,实现磁链的自动调节。实验结果证明,该控制方法能有效减小稳态时定子电流,转矩脉动显著降低。
开关磁阻电机;磁链自适应;直接转矩控制;模糊自适应
0 引 言
开关磁阻电动机(以下简称SRM)具有结构坚固、简单,调速范围宽,控制系统灵活,效率高,动态响应好等优点,是具有很大发展潜力的新型电机[1]。但SRM自身的双凸极结构以及非线性铁心磁路导致其存在明显的瞬时转矩脉动,如何有效地抑制SRM转矩脉动已成为各国学者研究的热点。
直接转矩控制(以下简称DTC)作为一种优良的静动态交流调速方法,可以有效减小转矩脉动,已应用到SRM控制[2-3]。文献[4-5]分别研究了传统转矩和磁链双闭环DTC用于减小转矩脉动,但给定参考磁链对控制系统的影响未进行深入地分析。文献[6]提出一种变磁链三闭环调速控制方法以减小定子电流幅值,但调速系统控制参数复杂且实现困难。文献[7]基于变磁链方法,分析并建立给定定子磁链与转速之间的关系,减小了系统转矩脉动,但该方法要进行大量数据测量,且需要进行线性函数拟合,拟合表达式存在一定误差。以上变磁链控制方法均缺乏实验验证。
本文基于模糊自适应技术,研究了一种磁链自适应DTC方法,通过建立给定定子磁链与转速之间的关系,实现了磁链的自动调节。该方法具有模糊控制灵活且适应性强的优点,减小了稳态定子电流,转矩脉动显著降低。最后通过搭建实物平台,在一台11 kW三相12/8 SRM上对此方法进行了有效验证。
1 SRM的基本数学方程
SRM定子相绕组两端电压值,等于绕组上的电阻压降和由磁链变化而产生的感应电动势之和,即:
(1)
式中:U,i,R分别为定子相电压、相电流、相电阻;θ为转子位置角;相绕组磁链Ψ(i,θ)为相电流i和转子位置角θ的函数。
当电机定子绕组通电时,会产生热能消耗,即铜耗pc,可表示:
(2)
SRM的瞬时转矩T:
(3)
由式(3)可知,瞬时转矩T是关于磁链对位置角的导数以及电流的函数。
2 传统定磁链模糊DTC方案
模糊控制本质上是一种非线性控制,具有较强的鲁棒性,当对象参数变化时有较强的适应性,因此,在非线性、变结构的SRM中引入模糊控制能够改善其调速性能[9,12]。图1为基于模糊自适应控制的SRM定磁链DTC系统结构图,具体的控制思路:转速误差e和误差的变化率ec经过量化因子的变换,输入到模糊控制器中,得到三个修正参数:ΔKp,ΔKi,ΔKd,修正参数与速度调节器中PID控制的初始参数相加,实现实时调整PID参数的目的,最终输出满足SRM系统要求的参考转矩Tref[8,10-11]。
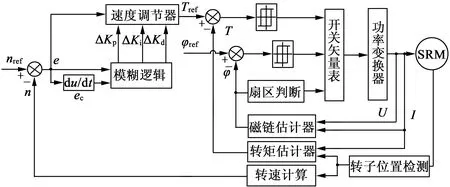
图1 传统定磁链模糊自适应DTC结构图
由图1可知,传统定磁链DTC在调速过程中磁链幅值固定不变,电机相电流幅值的大小与给定磁链大小密切相关,磁链微小变化都将会导致转矩和电流的较大波动。经过大量仿真实验,针对具体SRM,可以测出给定磁链幅值的变化范围。图2、图3是实验电机在定子磁链分别为0.285Wb和0.45Wb时转速、电流以及转矩变化波形。
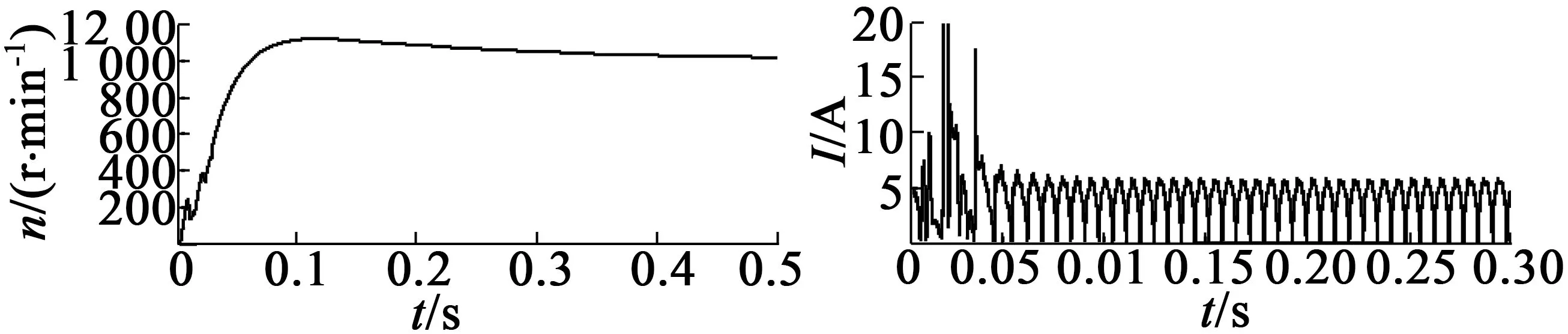
(a)转速及电流波形

(b)转矩波形
图2波形分析可得,若磁链不足,当电机起动时,转速低且转矩大,起动冲击电流会增大,转矩脉动也会增大,随着转速不断上升,电流变化趋于稳定,转矩脉动逐渐减小。稳态时,电流幅值较小,转矩脉动小,由式(2)可知,电机铜耗较小。

(a)转速及电流波形
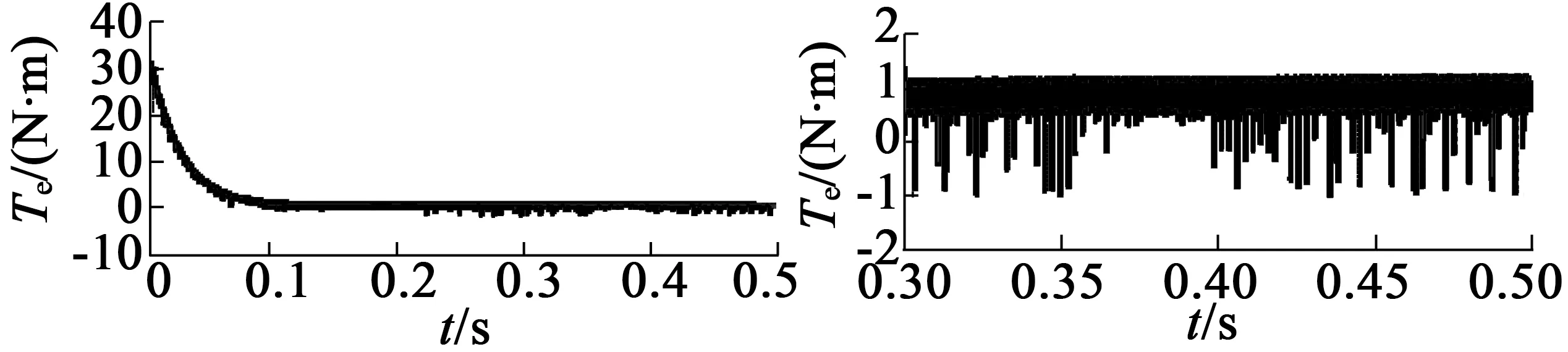
(b)转矩波形
图3波形分析可得,若磁链饱和,起动时电流波形稳定,起动转矩大且脉动小,转速平稳上升。当电机稳定运行时,电流幅值较大,转矩脉动增大,电机铜耗增大。
3 磁链模糊自适应DTC方案
传统定磁链DTC无法实现在减小转矩脉动的同时减小稳态电流,故需要调整磁链幅值,使其在调速过程中随着系统的变化而改变。因此,需找到调速过程中磁链的变化规律。
传统DTC技术的思想是给定固定的定子磁链幅值,通过调整定子和转子磁链的相角来控制转矩的增减,将转矩控制在给定范围。DTC技术实质是对转矩的控制,而磁链才是控制的核心。由此分析,转矩的变化规律应该与磁链的变化规律一致。依据参考转矩的生成方法,本文通过调节速度的偏差,实现磁链的自动调节。磁链调节的表达式:
(4)
式中:ψ为可变参考磁链;ψmin为给定最小参考磁链;K为调节系数;Δe为转速差;Kp为比例系数;Ki为积分系数。
磁链调节实质为PI调节,引入磁链调节器的DTC系统,其控制参数复杂,实时性要求高,本文将模糊自适应技术与PI控制相结合,构成模糊磁链自适应DTC系统。图4为模糊磁链自适应DTC系统结构图,参考磁链由速度偏差经过模糊控制器调节后生成,实现了磁链的实时在线调整。

图4 模糊磁链自适应DTC系统结构图
4 仿真与实验结果
4.1 仿真结果
在MATLAB/Simulink中搭建系统模型,表1为实验电机主要参数。
在模糊磁链自适应DTC调速系统中,给定转速n=1 000 r/min,在0.5 s时,施加负载转矩TL=10 N·m,速度、磁链调节器初始参数如表2所示。电流及转矩仿真波形如图5所示,磁链空间轨迹如图6所示。
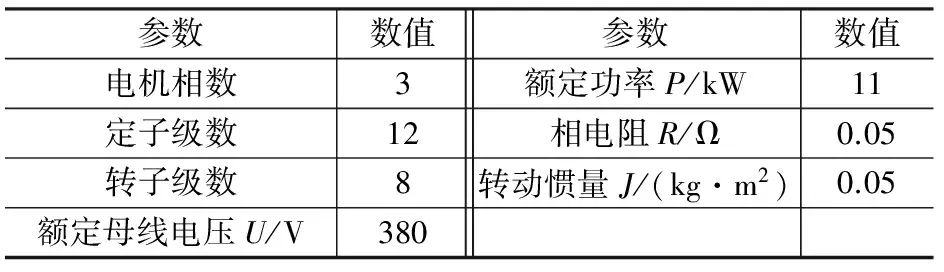
表1 实验电机主要参数

(a)转速及电流波形
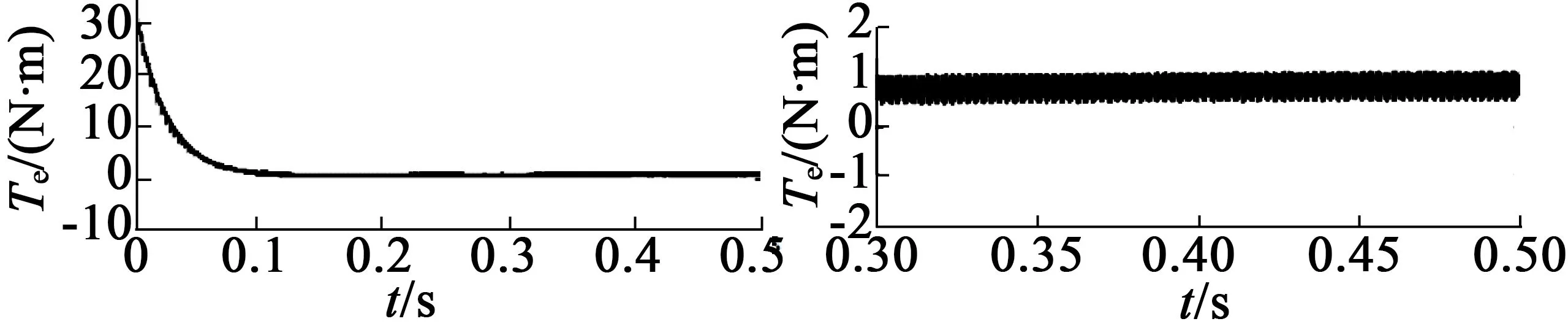
(b)转矩波形
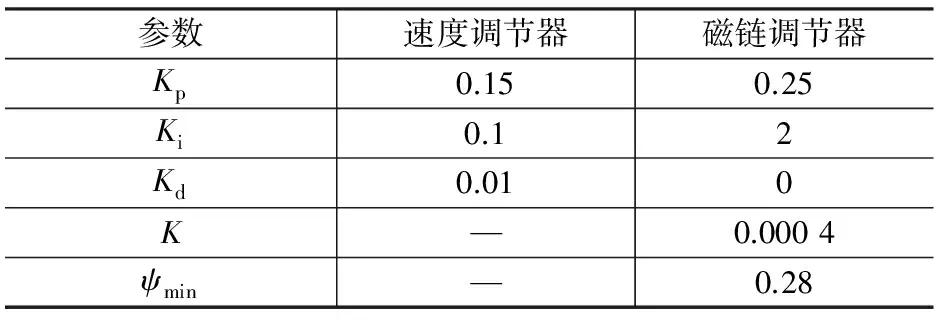
表2 速度、磁链调节器初始参数
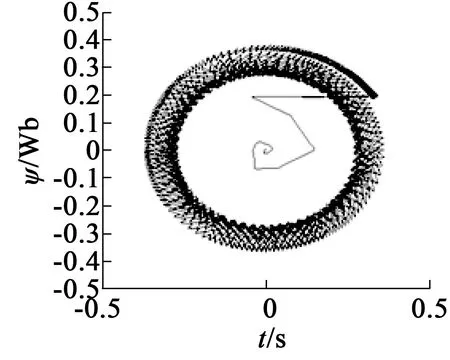
图6 磁链空间矢量轨迹
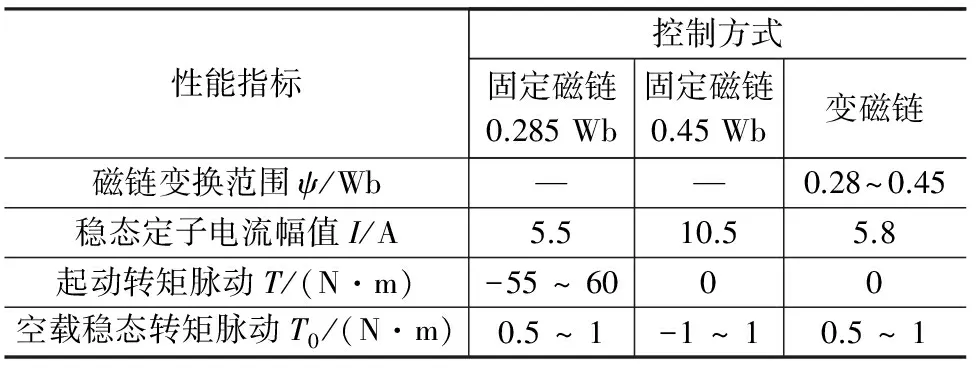
表3 电流及转矩性能指标
由上述仿真结果及图表分析可得,模糊磁链自适应DTC调速系统,通过对速度偏差进行调节,实现了磁链的自动调节。在电机刚起动转速低时,磁链幅值较大,电流波形稳定,从而充分抑制了转矩脉动;当电机转速不断上升,磁链幅值随之不断减小,在充分抑制转矩脉动的同时也减小了定子电流,从而降低了电机铜耗。
图7为加入负载转矩后稳态时转矩响应曲线。选择最优给定磁链0.34 Wb,定磁链DTC方式转矩脉动为9.8~12.7 N·m,而模糊磁链自适应DTC方式下,转矩脉动为10.8~12.3 N·m,转矩脉动降低了2%。
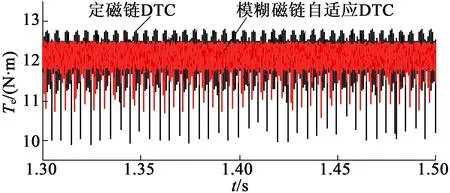
图7 稳态转矩波形
4.2 实验结果
为验证本文研究内容以及仿真结果的正确性,搭建了系统实验平台,控制器采用TI公司生产的TMS320F2812作为主控制芯片。图8为系统实验装置,包括实验电机、控制系统硬件装置等。

图8 系统实验装置
实验电机在转速n=1 000 r/min条件下空载运行,实测电流波形如图9所示。其中图9(a)、图9(b)分别为给定定子磁链0.285 Wb,0.45 Wb时的电流波形,图9(c)为模糊变磁链条件下时电流波形。由实验波形可得,实测电流波形与仿真波形基本吻合,说明模糊变磁链DTC方法可以有效减小稳态时定子电流幅值。
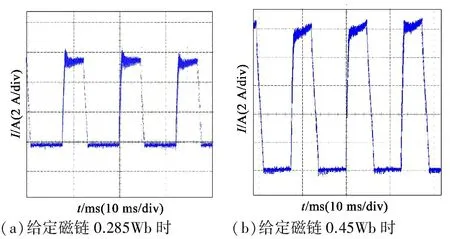
(a)给定磁链0.285Wb时(b)给定磁链0.45Wb时
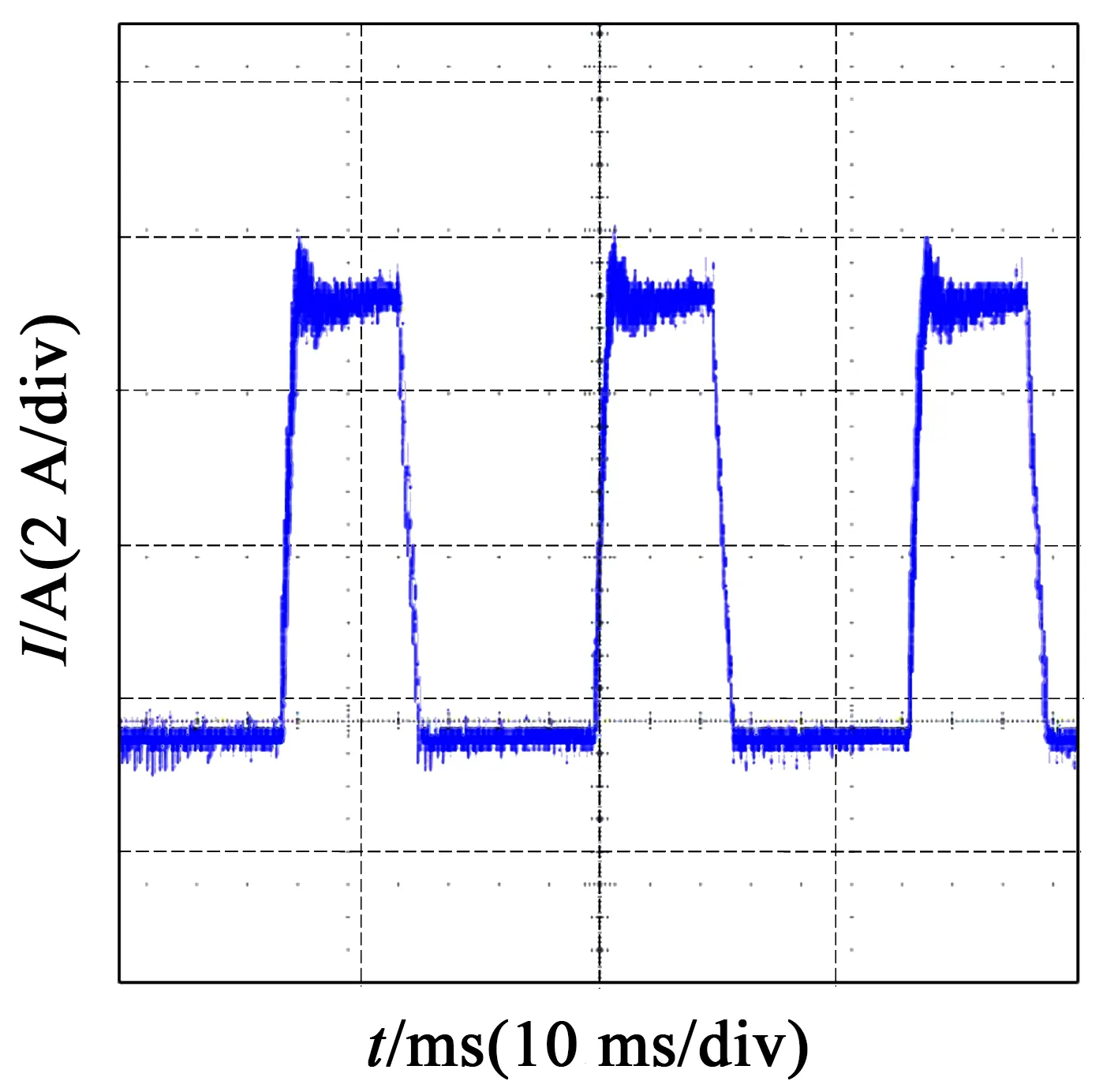
(c)模糊变磁链条件下
电机平稳运行后,加负载转矩TL=10 N·m,图10为实测转矩波形图,给定定子磁链为0.34 Wb,由实验波形可得,模糊磁链自适应DTC方法可以有效减小转矩脉动。
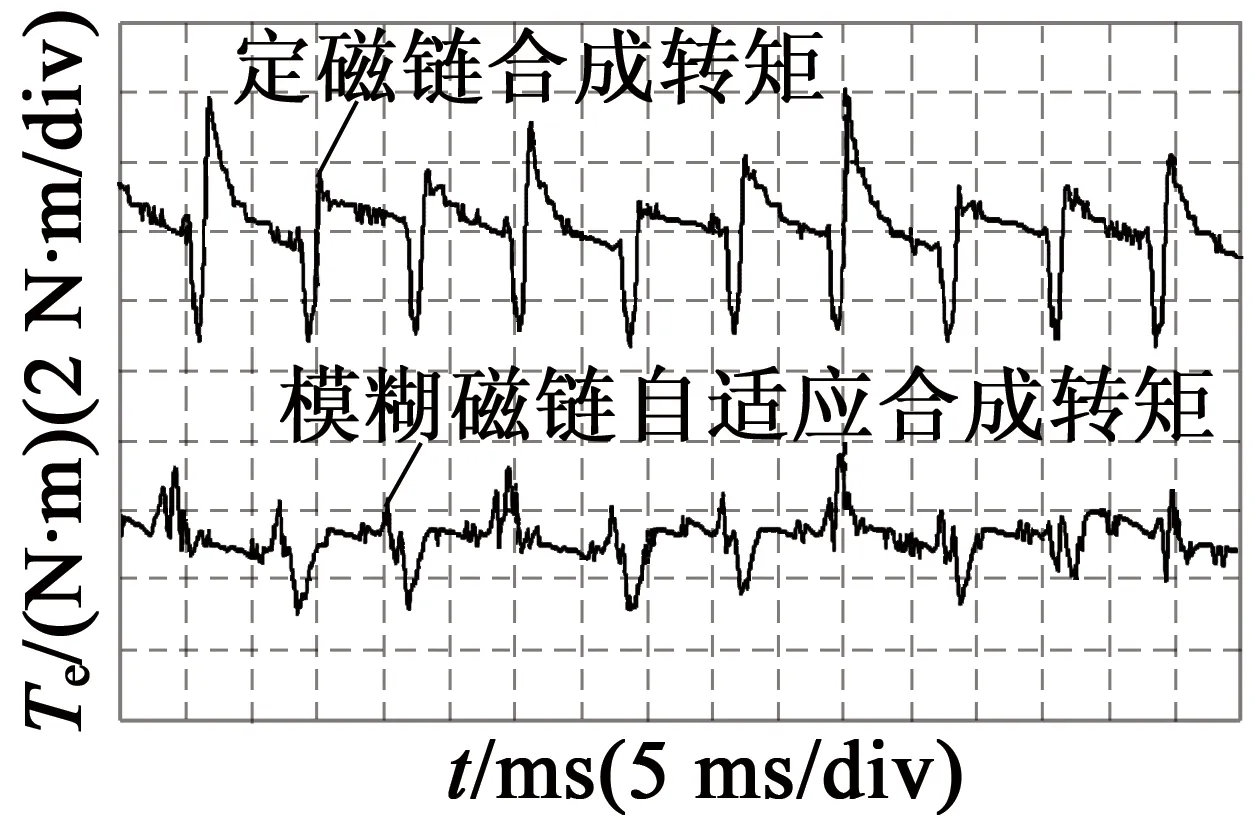
图10 实测转矩波形
5 结 语
本文针对传统定磁链DTC系统中定子电流幅值过大的问题,研究了一种模糊磁链自适应DTC方法,通过搭建给定定子磁链与转速之间的联系,实现了磁链的自动调节。仿真和实验结果表明,该控制方法有效减小了定子电流幅值,降低了电机铜耗,转矩脉动显著降低。
[1] COSSAR C,MILLER T J E.Electromagnetic testing of switched reluctance motors[C]//International Conference on Electrical Machines,Manchester,US.1992,2:470-474.
[2] 王勉华.开关磁阻电机多种控制策略的仿真比较研究[J].系统仿真学报,2007,19(20):4844-4826.
[3] 梁涛年,李勇,杜吉林,等.开关磁阻电机控制策略综述[J].微特电机,2014,42(12):77-80.
[4] CHEOK A D,FUKUDA Y.A new torque and flux control method for switched reluctance motor drives[J].IEEE Transactions on Power Electronics,2002,17(4):543-557.
[5] JEYABHARATH R,VEENA P,RAJARAM M.A novel DTC strategy of torque and flux control for switched reluctance motor drive[J].IEEE Transactions on Power Electronics,2006,12(12): 1-5.
[6] 王勉华.SRM直接转矩控制调速系统结构研究[J]. 电气传动, 2012, 42(8): 3-5.
[7] 陈金文,杨明发.基于转速磁链特性的开关磁阻电机直接转矩控制[J].电气传动,2014,44(8):7-10.
[8] HANG Jun,LI Li.Switched reluctance motors direct torque control research based on RBF neural network and fuzzy adaptive PID controller[C]//IEEE Intelligent Human-Machine Sytems and Cybernetics (IHMSC),2010,2(1):135-138.
[9] WANG Mianhua.The fuzzy-PI control of switched reluctance motor based on DTC[C]//IEEE International Conference on Measuring Technology and Mechatronics Automation.IEEE,2009:606-609.
[10] 孙建忠,白凤仙.基于DSP的开关磁阻电机调速系统的模糊控制[J].电机与控制应用,2007,34(5):33-36.
[11] 修杰,夏长亮.基于遗传算法的开关磁阻电机自适应模糊控制[J].电工技术学报,2007,22(11):69-73.
[12] 窦振中.模糊逻辑控制技术及其应用[M].北京:北京航空航天大学出版社,2001.
An Improved Direct Torque Control for Switched Reluctance Motor Based on Fuzzy Adaptive
LIUZhan-qian,TANGJing,YANGYan-xiang,WANGJun,SONGXiao-xiao
(Xihua University, Chengdu 610039, China)
The current amplitude of state statorfor switched reluctance motor is relatively large based on the traditional DTC technology, then the copper consumption of the motor increases. Based on the fuzzy adaptive technique, a flux-linkage adaptive direct torque control was researched in this paper. It realized the automatic adjustment of the flux-linkage by establishing the link between the stator flux linkage and the speed. The experimental results show that the method reduces the current amplitude effectively, and the torque ripple is reduced significantly.
switched reluctance motor (SRM); flux-linkage adaptive; direct torque control; fuzzy adaptive
2015-11-21
四川省科技厅创新及公益类重大科技项目(2014GZ0126);四川省电力电子节能技术与装备重点实验室开放研究基金(szjj2015-065);西华大学研究生创新基金(ycjj2015211)
TM352
A
1004-7018(2016)05-0071-04
刘占千(1990-),男,硕士研究生,研究方向为电力电子在电力系统中的应用。
