永磁同步电动机的哈密顿控制与DSP实现
2016-05-25解洪超于海生
解洪超,于海生
(青岛大学,青岛 266071)
永磁同步电动机的哈密顿控制与DSP实现
解洪超,于海生
(青岛大学,青岛 266071)
为了实现对永磁同步电动机(PMSM)速度的精确控制,提出了一种利用端口受控哈密顿(PCH)方法对速度伺服系统进行控制的方法。首先,根据PMSM的PCH数学模型,求取速度控制器,并针对负载转矩未知的情况设计了转矩观测器;然后,搭建了一套基于TMS320F2812 DSP的速度控制系统实验平台;最后,通过实验对设计的控制器进行了验证。实验结果表明了该控制器能够实现电机的速度控制,并且具有良好动态性能及稳态性能,满足了PMSM高性能控制要求。
永磁同步电动机;TMS320F2812;哈密顿系统
0 引 言
永磁同步电动机具有结构简单、功率因数高、负载能力强、性能可靠等优点,在各种高精度伺服控制系统中应用广泛[1]。同时,半导体技术的快速发展,使得数字化控制器成为电机控制的主流方向。适合于电机控制的数字信号处理器由于计算能力强、片外资源丰富和性能稳定等诸多优点在交流驱动系统中得到广泛应用,TMS320F2812作为一款主流的DSP芯片在伺服控制系统中倍受青睐[2-3]。因具有控制简单、集成化水平高、控制精确、抗干扰能力强的特点, 以DSP为核心的伺服系统已成为交流伺服系统发展的趋势[4]。
控制策略的发展使人们不再满足于单一的PI控制,开始研究高性能控制策略在DSP中实现的可能性。文献[5]针对PMSM的矢量控制和直接转矩控制进行了实验验证, 但是直接转矩控制会出现转矩和磁链脉动的问题;文献[6]设计了一套利用模糊控制策略对伺服系统进行控制的系统,但是存在控制精度低的问题;文献[7]将滑模变结构控制策略引入到PMSM控制系统中,但会降低系统的稳定性。与模糊控制策略和滑模变结构控制策略相比,端口受控哈密顿控制方法具有结构简单、控制器求取比较容易、响应快速、稳态误差小等的优点[8]。同时,相对于传统PI控制,端口受控哈密顿系统控制精度高,可控制性强,但系统对于电机参数依赖性强,容易受到环境的影响而造成系统的不稳定。将端口受控哈密顿控制方法通过DSP应用到永磁同步电动机速度控制系统中,不但可以提高系统的控制精度和响应速度,同时也能够有效抑制系统扰动。
1 永磁同步电动机的PCH原理及控制器设计
PMSM在dq同步旋转坐标系下的数学模型[9]:
(1)
式中:ud,uq分别为d,q轴定子电压;id,iq分别为d,q轴定子电流;τL为负载转矩;Ld,Lq分别为d,q轴定子电感;J为转动惯量;Rs为定子电阻;Φ为永磁体产生的磁链;p为极对数;ω为转子机械角速度;θ为机械角度;τ为电磁转矩。
端口受控耗散哈密顿系统模型[10]:
(2)
式中:R(x)为半正定对称矩阵,R(x)=RT(x)≥0;J(x)为反对称矩阵,J(x)=-JT(x);H(x)为哈密顿函数。
定义系统的状态变量和输入变量:
(3)
取PMSM系统的哈密顿函数:
(4)
可将PMSM模型(1)写成式(2)的端口受控耗散哈密顿形式,且有:
(5)
(6)
当负载转矩恒定已知时,根据式(1)中永磁同步电动机转矩方程可知:对于表面式PMSM(Ld=Lq),利用最大转矩/电流原理可确定稳态时(在平衡点处)负载转矩τL与id,iq的关系:
(7)
根据式(3)、式(7)及端口受控哈密顿控制原理可求得速度控制器[9]:
(8)
当负载转矩恒定未知时,构造负载转矩观测器[11]:
(9)
式中:ω,id和iq均是可测的,k1,k2为设计参数,选取适当的k1,k2可使观测器渐近稳定,取:
(10)
式中:sp为观测器的极点。
(11)
由于观测器中存在微分,将观测器(9)离散化后得到负载转矩观测器的离散化数学模型:
(12)
式中:T为采样周期。由已知的ω,id和iq便可在DSP中计算出负载转矩的估计值。由观测器模型(12)和控制器模型(11)即可实现对PMSM负载转矩恒定未知时速度的控制。
2 基于PCH方法的永磁同步电动机控制系统原理图
基于状态PCH方法的PMSM速度控制系统如图1所示,系统采用id=0的矢量控制,控制器采用端口受控哈密顿控制方法,其中,ω0给定角速度,ω表示电机的实际角速度。

图1 永磁同步电动机速度控制系统框图

3 控制系统实验平台硬件设计
为了验证PCH控制算法的可行性,搭建了一套试验平台以实现PMSM的速度控制。实验平台的硬件电路如图2所示。试验平台主要分为逆变电路、永磁同步电动机、检测电路和控制电路4部分。
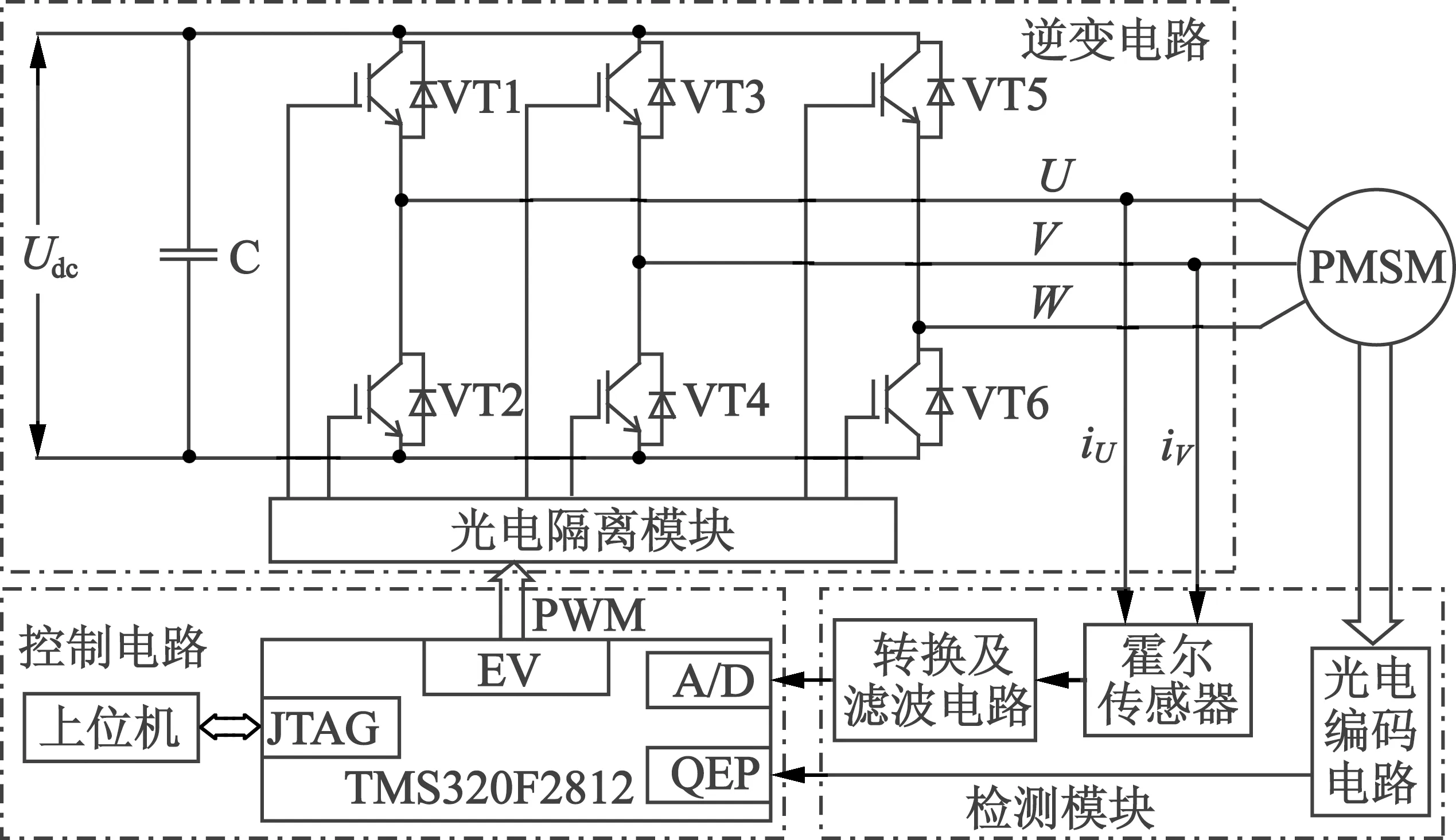
图2 实验平台的硬件电路设计
逆变电路以智能功率模块(以下简称IPM)作为主控对象,将直流电转化成期望的三相电以驱动电机[12]。永磁同步电动机采用表面式PMSM。检测电路包含电流检测和速度检测电路,并构成电流和速度反馈双通道;电流检测通过霍尔电流传感器将电流值转化成相应的电压值,并通过转换和滤波电路将检测值输入到控制电路中A/D模块;速度测电路通过光电编码器将速度量转换成脉冲信号后输入到控制电路中的QEP单元。控制电路以TMS320F2812为控制核心,根据反馈的电流和速度值并根据控制策略,经过内部运算后,在EV模块中输出相应的6路PWM波经光电隔离后输入到逆变电路中,以实现对电机的控制。
3.1 逆变电路设计
逆变电路将控制电路输出的PWM波,经光电隔离后输入到IPM中,实现了将直流电逆变为三相交流电,以对驱动电动机。其中,逆变电路由IPM和光电隔离电路构成。
IPM具有结构简单、驱动功率小等特点,本设计中采用FSAM30SH60A型IPM,该IPM将6个IGBT封装在一起, 组成三相全桥逆变电路,并且模块内部集成了检测及保护电路,若模块控制电源发生过流、过压、过热等故障时,IPM将故障信号送到DSP中,实现对系统的实时保护[13],确保系统具有很高的安全性和可靠性。
光电隔离模块主要实现控制信号与驱动电路之间电气隔离,对系统起到至关重要的保护作用。系统设计选用6N137高速光耦作为光电隔离器,并将它的使能引脚VE和IPM的保护管脚相连接,在系统产生故障时,能够迅速切断PWM信号的输入,对系统实时保护。由于6N137的信号输入端电压要求为5 V,而TMS320F2812产生的PWM波为3.3 V,在将PWM波输入到光耦前,需要先接入反相输出触发器74LS563[2]。图3给出了光电隔离模块的结构。

图3 电隔离模块的结构图
3.2 电流检测电路
电流检测的原理主要是利用电流传感器将电流信号转化为电压信号,再经过放大偏移及滤波处理后,得到满足TMS320F2812 A/D输入范围(0~3 V)的电压信号,以获得电机的电流信息,构成电流反馈通道[13]。
实验采用TBC10SY霍尔电流传感器,它将电流信号转化为-4~+4 V的电压信号,经分压和偏移处理后,最终得到0~3 V的电压信号,并通过低通滤波和电压跟随器进行滤波处理。图4示出定子A相电流检测电路图。
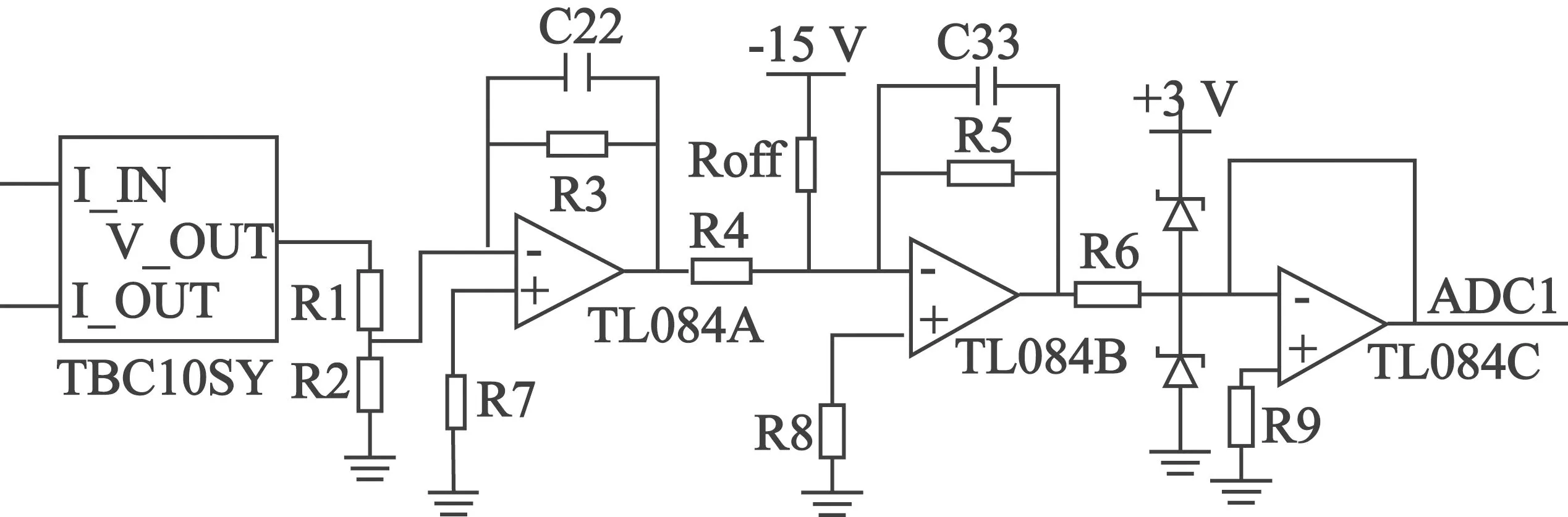
图4 A相电流检测电路
3.3 速度信号检测电路
速度检测电路通过光电编码器将电机的速度信息转化为正交电脉冲信号,并经过转换后输入到DSP的事件管理器(EV)中,然后,正交编码电路和捕获单元根据光电编码器的脉冲信息来确定电机的转速以及转动方向[13],从而构成速度反馈通道。
实验采用可产生A+,A-,B+,B-,Z+,Z- 6路差分信号的2 500线增量式光电编码器,并通过差分信号转换芯片AM26LS32AM将差分信号转换成0~+5V的A,B,Z三路脉冲信号,然后,利用芯片SN74LVC4245DB(双向电平转换器)将脉冲信号转换成满足DSP电压输入范围的信号后再输送到EV模块中[2]。图5给出了正交编码脉冲转换电路。

图5 正交编码脉冲转换电路
4 实验结果
为了验证基于端口受控哈密顿控制算法的实际控制效果,对PMSM控制系统进行了实验研究。被控对象为一台内部集成光电编码器的PMSM,光电编码器为2 500线增量式编码器。PMSM的型号为SM060R20B30MN,其参数为:额定功率PN=200 W,额定电流IN=7.2 A,额定转矩TN=0.637 N·m,瞬时最大转矩Ts=1.9 N·m,永磁体磁通Φ=0.175 Wb,额定转速ω=0.637 N·m,极对数p=4,转动惯量J=0.189×10-4kg·m2,定子电阻R=0.33 Ω,定子电感L=0.9 mH。
图6和图7为负载转矩恒定已知(τL=0.2 N·m)的情况下U,V相的定子电流响应曲线和系统转速响应曲线,控制器的给定参数为ω0=200rad/s,r=4,k=2。

图6 U,V相的定子电流响应曲线 图7 系统转速响应曲线
从图6和图7中我们可以看出,在转矩已知的情况下,控制系统能够快速到达给定转速,且稳态误差很小,控制效果良好。
在有负载转矩观测器的情况下,电机的起动负载为τL=0.2N·m,30s后负载转矩变为τL=0.4N·m,负载转矩的跟踪曲线及转速响应曲线如图8和图9所示,控制器的给定参数为ω0=220rad/s,r=4,k=2,负载转矩观测器参数为sp=-100,从图8中可以看出转矩观测器能够跟踪负载转矩,但同时由于外部干扰的问题,观测到的负载转矩存在扰动,对实验系统有一定的影响,有待于进一步优化。由图9可以看出,加上负载观测器后,在负载发生变换的情况下,电机能够很快的恢复到给定速度使系统达到稳定。
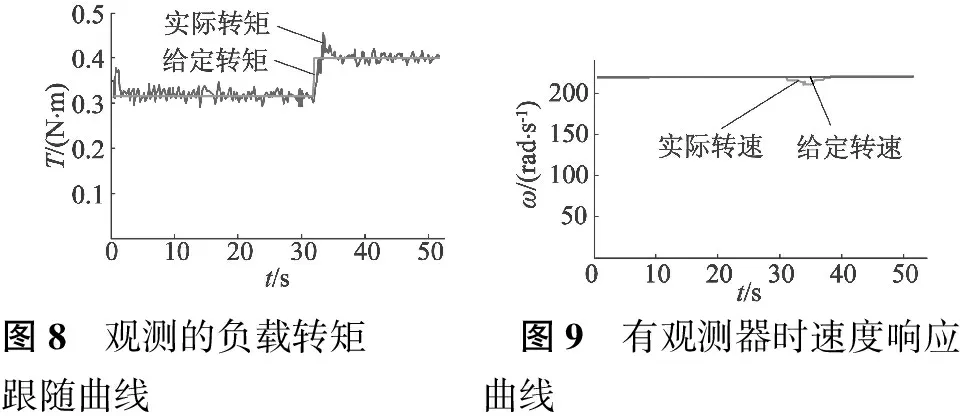
图8 观测的负载转矩跟随曲线 图9 有观测器时速度响应曲线
5 结 语
本文采用哈密顿控制方法实现了对永磁同步电动机的速度控制,并针对转矩未知的情况,设计了负载转矩观测器,有效地解决了负载变化对电机控制的干扰问题。在此基础上,选用TMS320F2812为核心,并配以A/D采样电路、旋转编码电路和保护电路,设计了一套基于DSP的永磁同步电动机哈密顿控制系统。针对转矩已知和转矩未知两种情况,分别进行了电机速度控制实验验证。实验结果表明:基于PCH的永磁同步电动机速度控制方法是可行的,并且具有良好的控制效果。
[1] 王宏,于泳,徐殿国.永磁同步电动机位置伺服系统[J].中国电机工程学报,2004,24(7):151-155.
[2] 解洪超,于海生.永磁同步电动机调速系统的实现与实验研究[J].青岛大学学报(工程技术版), 2015,30(2):1-6.
[3] 宋雪雷,王永兴.基于DSP的PMSM控制器设计及相关问题分析[J].电力电子技术,2010,44(7):33-34.
[4] 林伟杰,郑灼,李兴根,等.模糊自适应PI控制永磁同步电动机交流伺服系统[J].中小型电机,2005,32(3):10-13.
[5] 徐艳平,钟彦儒,杨惠.永磁同步电动机矢量控制和直接转矩控制的研究[J].电力电子技术,2008,42(1):60-62.
[6] 朱孝勇,李正明.基于DSP的PMSM模糊位置伺服系统的研究[J].江苏大学学报(自然科学版),2002,23(5):82-86.
[7]LEUVQ,CJOIHH,JUNGJW.FuzzyslidingmodespeedcontrollerforPMsynchronousmotorswithaloadtorqueobserver[J].IEEETransactionsonPowerElectronics,2012,27(3):1530-1539.
[8]LIKe,LIUXudong,SUNJing.RobustcurrentcontrolofPMSMbasedonPCHanddisturbanceobserver[C]//2014 33rdChineseControlConference.IEEE,2014:7938-7942.
[9] 于海生,赵克友,郭雷,等.基于端口受控哈密顿方法的PMSM最大转矩/电流控制[J].中国电机工程学报,2006,26(8):82-87.
[10] 于海生,魏庆伟,赵克友.双馈感应电动机的哈密顿系统建模与控制[J].山东大学学报(工学版),2006,36(2):46-51.
[11]PETROVIC,ORTEGAR,STANKOVICAM.InterconnectionanddampingassignmentapproachtocontrolofPMsynchronousmotors[J].IEEETransactionsonControlSystemsTechnology,2001,9(6):811-820.
[12] 孔维娟,叶汉民,覃嘉恒.滑模变结构在数控机床主轴上的DSP实现[J].微计算机信息,2009,25(13):69-71.
[13] 崔皆凡,王贺敏,王成元.基于DSP滑模变结构的PMSM控制系统设计[J].电力电子技术,2008,42(1):63-65.
Hamiltonian Control of Permanent Magnet Synchronous Motor and DSP Implementation
XIEHong-chao,YUHai-sheng
(Qingdao University,Qingdao 266071,China)
To achieve precise speed control of permanent magnet synchrotrons motor (PMSM), the port-controlled Hamiltonian (PCH) method was presented to control the speed servo system. Firstly, the speed controller was got based on PCH mathematical model of PMSM, and a torque observer was designed for the unknown load torque. Then, an experimental platform of speed control system based on TMS320F2812 DSP was constructed. Finally,the experiments were carried out to verify the validity of the designed controller. Experimental results show that the designed controller can achieve the speed control of PMSM, and the system has good dynamic performance and steady-state performance, which can satisfy the high performance requirements of PMSM control system.
permanent magnet synchronous motor (PMSM); TMS320F2812; Hamiltonian system
2015-06-26
国家自然科学基金项目(51077007)
TM341;TM351
A
1004-7018(2016)05-0060-04
解洪超(1990-),男,硕士研究生,研究方向为电力电子与电机系统的非线性控制。
