基于改进差分进化算法的IIR滤波器设计
2016-05-25秋研东
秋研东,王 伟
(西安空间无线电技术研究所 陕西 西安 710071)
基于改进差分进化算法的IIR滤波器设计
秋研东,王 伟
(西安空间无线电技术研究所 陕西 西安 710071)
差分进化由于其算法简单、收敛速度快,所需领域知识少而受到关注。通常,根据优化问题的约束条件差分进化算法需要进行变量上、下界的限制。本文提出利用IIR滤波器零极点特性来进行IIR滤波器设计,采用复数编码降低了变量的维度,并在设计IIR滤波器时不需要对变量范围进行约束,同时利用超出边界的解进行变异操作,以达到更加快速精确的收敛到全局最优解的目的。
差分进化算法;变异操作;IIR滤波器设计;零极点特性
近年来,一种新的进化算法——差分进化算法,被各国学者所广泛关注。作为一种进化算法的,差分进化算法最初是由Rainer Storn和Kenneth Price于1995年提出[1]。它是一种实数编码的进化算法,具有较强的全局搜索能力和收敛速率,在解决复杂的全局优化问题上,差分进化算法被证明是一种有效的全局最优解搜索算法[2]。它的主要特点是算法简单、收敛速度快,所需领域知识少,比较适合于解决复杂的优化问题。
根据传输函数零极点特性,可以将数字滤波器分为两类,即FIR和IIR。FIR只包含零点,其极点全部为零。而IIR的极点不为零,零点可以全部为零。在设计数字滤波器时通常需要考虑的因素有两大方面,一是滤波器幅度响应;二是滤波器的相位响应。FIR滤波器可以实现系统的线性相位,所以再设计FIR滤波器时只需要考虑其幅度响应的设计。通常达到相同指标的IIR滤波器阶数要比FIR滤波器少很多,这就意味着乘法器的数量会明显减少[3-4]。
通常,一个IIR滤波器的稳定性是由其极点确定的。对于因果稳定的IIR滤波器来说,其极点需要全部落在单位圆内。为了更强的阻带衰减,其零点应该在单位圆上。在IIR滤波器设计的过程中,其零极点必然不全为实数,此时系统无法物理实现,而采用二阶因子(second-order factor,SOF)来设计[5-6]就可以使得滤波器能物理实现。
文中剩余部分内容如下。第二部分介绍文中提出的基于IIR滤波器零极点特性的差分进化算法。第三部分展示仿真结果并进行分析。第四部分进行总结。
1 提出的设计算法
IIR滤波器的传输函数可以如下表示:

为了更清楚的分析IIR滤波器的零极点,可以将其传输函数改写为:

式(2)中A=p0,[·]为上取整,p1,np2,n为零点二阶因子系数,q1,mq2,m为极点二阶因子系数,当 p2,nq2,m为零时二阶因子变成一阶因子。通常,为了滤波器可以物理实现,需要零极点二阶因子系数全为实数。
只考虑二阶因子的情况下均为偶数,IIR滤波器的幅度响应可以表示为:
式(3)中定义

一个理想的低通滤波器其幅度响应如下:

那么滤波器优化设计的目标为:

其中x=[aTbT]T
式(5)中W(ω)为加权最小二乘因子[7],文中采用最小均方误差准则[8]并关注0到π上的幅度相应,所以有:

采用差分进化算法对(5)(6)进行最优化求解时,常规的算法采用由式(2)得到的响应函数来进行解空间搜索,其解空间的维度为M+N实数空间。文中提出的算法采用式(3)得到的响应函数来进行解空间搜索,其解空间的维度为 (M+N)/2复数空间,利用实系数二阶因子的特点可以提高搜索效率[9-10]。此外文中在原始差分进化算法的基础上根据IIR滤波器特点改进了变异策略,下面介绍改进的变异策略和其理论推导。
设 x(i)=[a(i)Tb(i)T]T为当前搜索到的解
理论推导如下:
设不稳定的一阶低通IIR滤波器的响应函数为:

其中|a|>1,则有与其相应的稳定一阶低通IIR滤波器的响应函数为:

式(8)中ωa为a的相位角
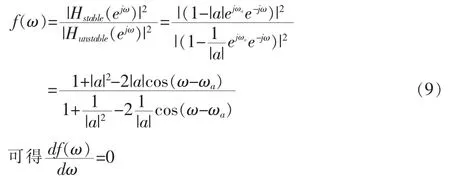
对于不稳定的N阶低通IIR滤波器
观察式(9)可以发现变易操作的实质是在初始设计的滤波器上级联一个全通滤波器,即

这只会改变其相位响应而不影响其幅度响应。所以对于不稳定的IIR滤波器极点来说,存在相应的稳定极点可以代替,而它们之间的差别只是幅度响应上的倍数关系。而对于IIR滤波器的相位响应可以采用一个全通滤波器即群时延均衡器[11-12]对其相位进行补偿,在此不做讨论。
2 算法与流程
传统的差分进化算法主要流程如下[6,13-15]
Step1:初始化向量x,迭代最大次数K,种群数量Num,终止条件C,并令l=0
Step2:计算适应度种群适应度fitness=e(x),计算终止条件若满足则输出最优结果,否则继续
Step4:进行交叉操作
Step5:进行条件约束
Step6:进行选择操作,令l=l+1,返回step2
在使用本文提出的算法进行试验时发现交叉操作会降低结果的精度,这是由于交叉操作会造成满足限制条件的当前最优解也发生改变,从而远离应该达到的解,这就会跳出全局最优解附近,最终在迭代次数达到上限时仍然无法达到全局最优解,故本文提出的改进算法中去除了交叉操作。
根据上述理论,改进的差分进化算法主要流程如下:
Step1:初始化向量x,迭代最大次数K,种群数量Num,终止条件C,并令l=0
Step2:计算适应度种群适应度fitness=e(x),计算终止条件若满足则输出最优结果,否则继续
Step4:进行选择操作,执行文中提出的变异操作,令l=l+ 1,返回step2
3 仿真结果与分析
文中对差分进化算法、改进的算法进行了仿真实验
目标低通IIR滤波器幅度响应函数为:

仿真输入参数为种群数Num=200,滤波器阶数M=N=12,终止条件C=10-5。变异操作步长F=random(0~1)[16]。对改进的算法进行了10次独立实验,其结果如表1所示。
对经典算法进行了10次独立实验,其结果如表2所示。
观察表1与表2可以发现文中提出的算法相比经典算法在最小均方误差上降低了一个数量级,这主要是由于阻带衰减增大引起的。同时可以看出文中提出的算法鲁棒性比经典算法要更强。

表1 改进差分进化算法实验结果

表2 经典差分进化算法实验结果

图1 本文提出算法与经典算法设计的滤波器幅度响应对比

图2 本文提出的算法与经典算法的均方误差
对比图1中两条曲线可以清晰的看出,文中提出的算法与经典算法在通带上具有比较接近的性能,而文中提出的算法明显增大了阻带衰减。图2显示了本文提出的算法与经典算法的均方误差,可以看出本文提出的算法相比经典算法在迭代初期收敛速度慢却更加平缓,这是由于本文提出的算法在每次迭代是总是优先寻找满足稳定性条件的解从而限制了零极点的快速变异并导致收敛速度下降,最终于514代收敛,而经典算法收敛于第175代。
4 结束语
文中通过研究分析IIR滤波器零极点特性设计出一种基于该特性的差分进化算法变易操作,并且优化了经典算法的流程。通过仿真实验证实了文中提出的算法相比经典算法具有更强的鲁棒性、精确性,可以通过文中的算法有效设计高阻带衰减和窄过渡带的IIR滤波器。
[1]汪慎文,丁立新,张文生,等.差分进化算法研究进展[J].武汉大学学报:理学版,2014,60(4):283-292.
[2]LI Gao-yang,LIU Ming-guang.The summary of differential evolution algorithm and its improvements[C]//2010 3rd International Conference on Advanced Computer Theory and Engineering:IEEE Conference Publications,2010:V3-153-V3-156.
[3]QIAO Hai-lu,LAI Xiao-ping,ZHANG Li-hua.Minimax phase error design of stable IIR filters using a sequential method[C]//2014 33rd Chinese Control Conference(CCC): IEEE Conference Publications,2014:7323-7327.
[4]DAI Chao-hua,CHEN Wei-rong,ZHU Yun-fang.Seeker optimiza-tion algorithm for digital IIR filter design[J].IEEE Transac-tions on Industrial Electronics,2010,57(5):1710-1718.
[5]Lesnikov V,Naumovich T,Chastikov A.The formulation of criteria of BIBO stability of 3rd-order IIR digital filters in space of coefficients a denominator of transfer function[C]// Design&Test Symposium (EWDTS),2014 East-West:IEEE Conference Publications,2014:1-3.
[6]Aimin Jiang,Hon Keung Kwan,Zhu Yan-ping et al.Efficient WLS design of IIR digital filters using partial secondorder factorization[J].IEEE Transactions on Circuits and Systems II:Express Briefs,2016,63(7):703-707.
[7]LI Xian-wei,GAO Hu-jun.Min-Max approximation of transfer functions with application to filter design[J].IEEE Transaction on Signal Processing,2015,63(1):31-40.
[8]Aimin Jiang,Hon Keung Kwan,Liu Xiao-feng et al.IIR digital filter design with novel stability condition[C]//2015 IEEE International Symposium on Circuits and Systems(ISCAS):IEEE Conference Publications,2015:2968-2971.
[9]Konopacki J,Moscinska K.Linear-phase IIR filter design based on FIR prototype with prescribed group delay[C]// Mixed design of Intergrated Circuits&Systems(MIXDES),2014 Proceeding of the 21st International Conference:IEEE Conference Publications,2014:459-463.
[10]WU Hui-cong,SONG Xue-jun.Digital filter design using evolutionary algorithms[C]//Intelligent Systems and Applications (ISA),2010 2nd International Workshop on Circuits and Systems:IEEE Conference Publications,2010:1-4.
[11]LAI Xiao-ping,LIN Zhi-ping.Design and application of allpass filters with equiripple group delay errors[C]//IEEE International Symposium on Circuits and Systems:IEEE Conference Publications,2013:2924-2927.
[12]LAI Xiao-ping,LIN Zhi-ping.Minimax phase error design of IIR digital filters with prescribed magnitude and phase response[J].IEEE Transaction on Signal Processing,2012,60(2):980-986.
[13]Krzysztof W.Hybrid differential evolution with covariance matrix adaptation for digital filter design[C]//Differential Evolution (SDE),2011 IEEE Symposium on:IEEE Conference Publications,2011:1-7.
[14]严慧,于继明.基于Matlab的IIR数字滤波器设计[J].软件导刊,2013,12(1):110-113.
[15]任伟.自由搜索算法在数字滤波器优化设计中的应用研究[D].湘潭:湘潭大学,2014.
[16]杨振宇,唐珂.差分进化算法参数控制与适应策略综述[J].智能系统学报,2011,6(5):415-423.
An IIR filter design method based on improved differential evolution algorithm
QIU Yan-dong,WANG Wei
(Xi’an Institute of Space Radio Technology,Xi’an 710071,China)
The Differential Evolution Algorithm is concerned for its properties of implementing simplified,convergence fast and requiring less features.Generally,according to constraint conditions of the optimization problems in differential evolution algorithm,the boundary of arguments are required to be restrained.In this paper,an improved algorithm which using the features of zero and pole points of IIR filters is developed for the design of IIR filters.A complex coding method is used to decrease the dimension of arguments.The solutions out of constraint conditions are used to implement mutation operation to achieve the goal of faster and more accurately converge to the global optimal solution.
DE;mutation operation;IIR filter design;zero and pole points properties
TN02
A
1674-6236(2016)23-0136-03
2016-06-21稿件编号:201606154
秋研东(1990—),男,陕西西安人,硕士。研究方向:空间通信技术。
