强力卷取机液压系统压力控制稳定性探究
2016-05-25包国华陈建林
包国华,陈建林
(新疆八一钢铁股份有限公司)
强力卷取机液压系统压力控制稳定性探究
包国华,陈建林
(新疆八一钢铁股份有限公司)
通过对液压伺服控制系统传递函数的分析与计算,分析了八钢热轧3#强力卷取机1#助卷臂在动作过程中压力控制不稳定的现象,通过对其稳定性进行校正消除这种震动现象,使其伺服控制系统稳定高效。
伺服控制系统;压力控制;传递函数;PID调节器;稳定性
1 前言
随着液压技术的不断发展,电液伺服控制技术在大型冶金设备使用的越来越广泛,八钢热轧卷取机使用伺服控制系统来完成助卷辊位置、压力的闭环控制。
液压伺服控制系统对整个控制过程中的系统快速性、精确性和稳定性有着很高的要求。但是对于同一个液压伺服控制系统而言,其稳、准、快是相互制约的。提高快速性,可能会引起强烈的震荡;改善了稳定性,控制过程有可能过于迟缓,甚至精度也会变差。因此在设计液压伺服控制系统是要对其稳定性、精确性和快速性进行校正。由于计算机技术的应用与发展,控制系统的校正多采用PID(Proportional Integral Derivative)调节器校正,其参数设定方便,结构改变灵活,应用效果良好。通过对八钢热轧3#卷取机1#助卷臂的控制系统的分析,探讨保证精度和快速性稳定不变的情况下,如何提高系统的稳定性。
2 3#卷取机1#助卷臂存在的主要问题
热轧3#卷取机作为厚规格带钢的卷取设备,由于其长时间的使用,其当初的设计参数发生了一些变化。如卷取机工作压力的调整,机械设备的锈蚀磨损及相对应的安装配合间隙的变化,使原有的控制系统参数已经不符合伺服液压控制系统的要求。因此,3#卷取机在工作使用时,会产生高频的机械振动,这种震动主要存在于1#助卷臂在打开最大位置开始动作的时候,持续时间大约为2s。这种高频震动一方面导致机械设备的疲劳失效加剧;另一方面造成卷取机所有的螺纹紧固在这种震动下失效;严重的会导致高压油管焊缝开裂,引起成火灾。
3 故障原因分析
通过对3#卷取机1#助卷臂(以下简称助卷臂)控制系统各检测元件记录的数据进行对比,如图1。发现当助卷臂处于工作状态下,在最大位置开始动作抱紧卷筒时,伺服阀开口度发生变化,在大约T=1.869s的时间内,伺服阀的开口度是高频次变化的,是不稳定的,与此同时液压缸的压力也在剧烈波动。由于压力的波动,其相关液压设备会产生震动冲击。因此认为助卷臂的这种高频震动是由于液压缸的压力波动所导致,而这种压力波动是由于伺服阀的启闭特性决定的。由于助卷臂采用的是伺服液压控制系统来完成动作,因此处理好液压伺服控制系统的稳定性就能有效地防止或减缓这种有害震动。

图1 1#助卷辊位置控制时的压力波动图与伺服阀的开口度
4 液压伺服控制系统稳定性校正
已知助卷臂的控制原理及各环节的穿的函数如图2所示,助卷臂的动力元件采用的是四通阀控液压缸,由于不考虑有弹性负载,因此其动力元件的传递函数包含一个积分环节和一个振荡环节,与此同时系统中还有伺服放大器、电液伺服阀及位移传感器的动态响应。
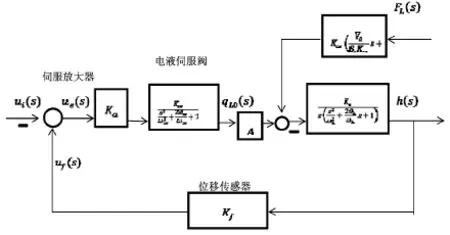
图2 控制原理及各环节的传递函数
由图2计算助卷臂控制系统的开环传递函数:

式中K0为系统的开环放大系数,K0=KfKsvKa/Ap
3#机1#助卷臂原始数据:液压缸控制腔作用面积Ap=4.91×10-2m2;电液伺服阀增益Ksv=84.5× 10-3m3/(s.A);伺服阀的固有频率ωsv=483.7rad/s;伺服阀阻尼比 ωsv=0.7;液压动力元件的固有频率ωh=734.8rad/s;液压动力元件的阻尼比Vhsv=0.2;位移传感器的增益Kf=1000V/m。
因为系统要调整,所以Ka伺服放大器增益待定。
经计算,KfKsv/Ah=1720V/A伺服放大器增益待定。未经系统校正的系统开环传递函数可表示为:

为了使系统稳定,必须使相位裕量γ和幅值裕量Kg均为正值。还要有一定的稳定裕量。因此保证系统的穿越频率ωc小于除ωr外的所有其他环节的时间常数之和ΣT的倒数,即

一般取ωc≈1/(2ΣT),此处取ωc=70.75rad/s。由于ωc处的渐近线斜率为-20db/dec,所以相位裕量为正值。增益裕量为正值时,系统就可以稳定了。因此:
则系统的开环增益为:K0=294.12
将Ka的值设计为0.171时,满足控制系统的稳定性要求。通过PID调节器将伺服放大器的总增益进行调节,设定为0.171时,对3#卷取机进行试运行,其各检测元件的检测数据如图3所示,前面出现的压力波动减弱,伺服阀的跟随性变好。
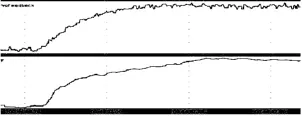
图3 经过PID调整后的伺服阀开度参数
如图3所示,伺服阀的反馈值明显稳定,压力波动减弱。3#卷取机1#助卷臂在动作时冲击减小,高频震动现象消失,状态明显改善,优于没有通过PID调节之前的设备状态。
5 结束语
通过对助卷臂的控制系统的分析,了解控制系统各参数对其稳定性、快速性以及准确性的影响,经过对3#卷取机1#助卷臂的震动分析,对控制其的传递函数的分析和计算,找出了产生震动的原因,通过开环增益的调整,在不影响设备的精确性和快速性的前提下对稳定性进行校正,减弱或消除这种不良的机械振动,使设备运行在良好的工作环境下。同时为今后伺服系统参数优化调整,改善设备状态积累了经验。
[1]张也影.流体力学.北京:高等教育出版社,1999.9.
[2]杨征瑞.电液比例与伺服控制.北京:冶金工业出版社,2009.8. [3]王积伟.控制工程基础.北京:高等教育出版社2000.1.
Study on the Stability of Pressure Control of Hydraulic System of the Powerful Coiler
BAOGuo-hua,CHENJian-lin
(XinjiangBayi Iron&Steel Co.,Ltd)
Through the analysis and calculation of the transfer function of the hydraulic servo control system,this paper analyzes the instability of the pressure control in the process of the No.1 winding arm of the No.3 strong coiler of hot rollingmill.The stabilityofthe servocontrol systemis more stable and efficient bycorrectingits stability
servocontrol system;pressure control;transfer function;PIDregulator;stability
TG333.2+4
B
1672—4224(2016)04—0046—03
联系人:包国华,男,本科,冶金机械工程师,乌鲁木齐(830022)新疆八一钢铁股份有限公司轧钢厂
E-mail:baogh@bygt.com.cn