引入虚拟阻抗的并联逆变器新型下垂控制策略
2016-05-24谢永流程志江李永东胡续坤崔双喜苏成博
谢永流, 程志江, 李永东, 胡续坤, 崔双喜, 苏成博
(1. 国网福建三明市供电公司, 福建 三明 365000; 2. 新疆大学电气工程学院, 新疆 乌鲁木齐 830008;3. 国网浙江桐乡市供电公司, 浙江 桐乡 314500)
引入虚拟阻抗的并联逆变器新型下垂控制策略
谢永流1, 程志江2, 李永东2, 胡续坤3, 崔双喜2, 苏成博1
(1. 国网福建三明市供电公司, 福建 三明 365000; 2. 新疆大学电气工程学院, 新疆 乌鲁木齐 830008;3. 国网浙江桐乡市供电公司, 浙江 桐乡 314500)
在微网逆变器并联运行系统中,由于各逆变器之间的线路距离不同,导致其输出总阻抗不同且呈阻抗特性,传统的下垂控制无法得到正确运用,系统不能实现功率精确分配。为了解决这个问题,本文在传统下垂控制算法理论的基础上,提出一种引入虚拟阻抗的新型下垂控制策略。当负载突变时,该控制策略能保证母线电压幅值和频率的稳定,抑制两台逆变器系统之间的无功环流,实现系统有功、无功的精确分配,并且通过引入功率微分环节,提高了系统的动态响应。仿真分析验证了本文控制策略的可靠性。
微网逆变器; 阻抗特性; 下垂控制; 虚拟阻抗; 无功环流
1 引言
随着能源日益枯竭,世界各国面临巨大的能源危机挑战,为了解决能源不足问题,各国都在探索和发展可再生能源[1,2]。对于传统大电网来说,由风能、太阳能和储能组成的微电网系统具有独特的灵活性和经济性[3]。在微电网系统中,可以通过逆变器装置与外部大电网连接,实现系统能量双向流动,提高本地负载供电可靠性[4,5]。
微电网系统处于孤岛运行模式下,并联逆变器控制策略必须能够保证系统母线电压幅值和频率的稳定,而系统中负载发生突变时,还要求逆变器输出功率能够迅速精确分配[6]。文献[7,8]采用基于虚拟阻抗的改进下垂控制,引入虚拟阻抗减小线路阻抗不确定性造成的功率耦合,通过改进电压/无功下垂控制解决线路阻抗不平衡引起的无功功率均分问题,有效地防止系统的电压偏差。文献[9]提出了基于虚拟功率的下垂控制策略,但虚拟功率作为直接控制变量,无法保证实际有功、无功功率在各逆变电源之间的精确分配。而文献[10]进一步提出了基于虚拟频率-电压的下垂控制策略,但控制策略复杂,在实际工程应用中很难实现。
本文针对微电网系统逆变器并联运行时,传统下垂控制无法实现系统功率合理分配的问题,通过分析逆变器并联运行产生环流的机理,提出了一种新型的下垂控制策略。当系统负载发生突变时,该控制策略能够减小系统因功率下垂系数和负载突变所造成的母线电压幅值和频率的不稳定,并实现了逆变器输出功率精确分配,通过引入功率微分环节,提高了系统的动态响应。仿真分析验证了本文控制策略的可靠性。
2 微电网系统环流影响分析
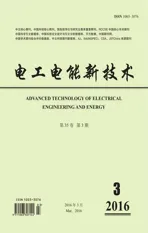
图1为微电网系统的拓扑结构。微电网系统主要是由不同分布式电源(太阳能、风机)、储能装置(蓄电池、超级电容)、交直流负载、滤波器和电力电子装置(Boost电路、整流器、逆变器等)组成的独立系统。
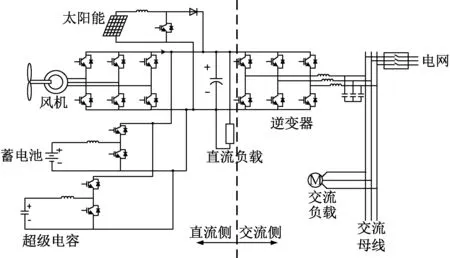
图1 微电网系统拓扑结构Fig.1 Micro-grid system topology
在实际微电网系统中,通常存在多台逆变器并联运行。以两台逆变器并联运行的简化模型进行分析系统环流产生的机理,如图2所示[11]。其中逆变器1和逆变器2输出电压矢量分别为E1、E2;逆变器1输出阻抗与线路阻抗之和为Z1=R1+jX1,逆变器2输出阻抗与线路阻抗之和为Z2=R2+jX2,R1、R2为等效电阻,X1、X2为等效电抗;交流母线电压为U。

图2 逆变器并联系统模型Fig.2 Inverter parallel system model
各逆变器系统总阻抗包含了逆变器输出阻抗和线路阻抗,其中逆变器的输出阻抗受到系统滤波器参数和逆变器控制参数影响,而线路阻抗受线路电压等级、输电线长度等因素的影响[12]。借鉴两台发电机并联运行原理,可以得到两台逆变器空载运行时,各台逆变器输出的无功功率Q1、Q2为:
(1)
式中,E01、E02分别为逆变器1和逆变器2的空载电压幅值。
如图2所示,根据电路原理进一步得出:
(2)
由式(1)和式(2)可知,当各逆变器系统输出总阻抗不同以及E01和E02幅值相同、相位发生变化时,系统会产生环流,其中环流Ih可以表示为:
(3)
由此可见,当两台相同容量逆变器并联运行时,如果各逆变器系统线路阻抗大小不同,必然会导致系统产生环流[9],而环流的大小取决于两台逆变器并联运行时输出电压的幅值和相位,与逆变器的输出阻抗成反比。
3 逆变器并联运行控制策略
在传统的下垂控制中,通过调节各台逆变器的下垂系数,可以实现系统功率的分配[13],下垂特性曲线如图3所示。其表达式为:
(4)
式中,m、n分别为有功下垂系数和无功下垂系数;x表示逆变器编号。
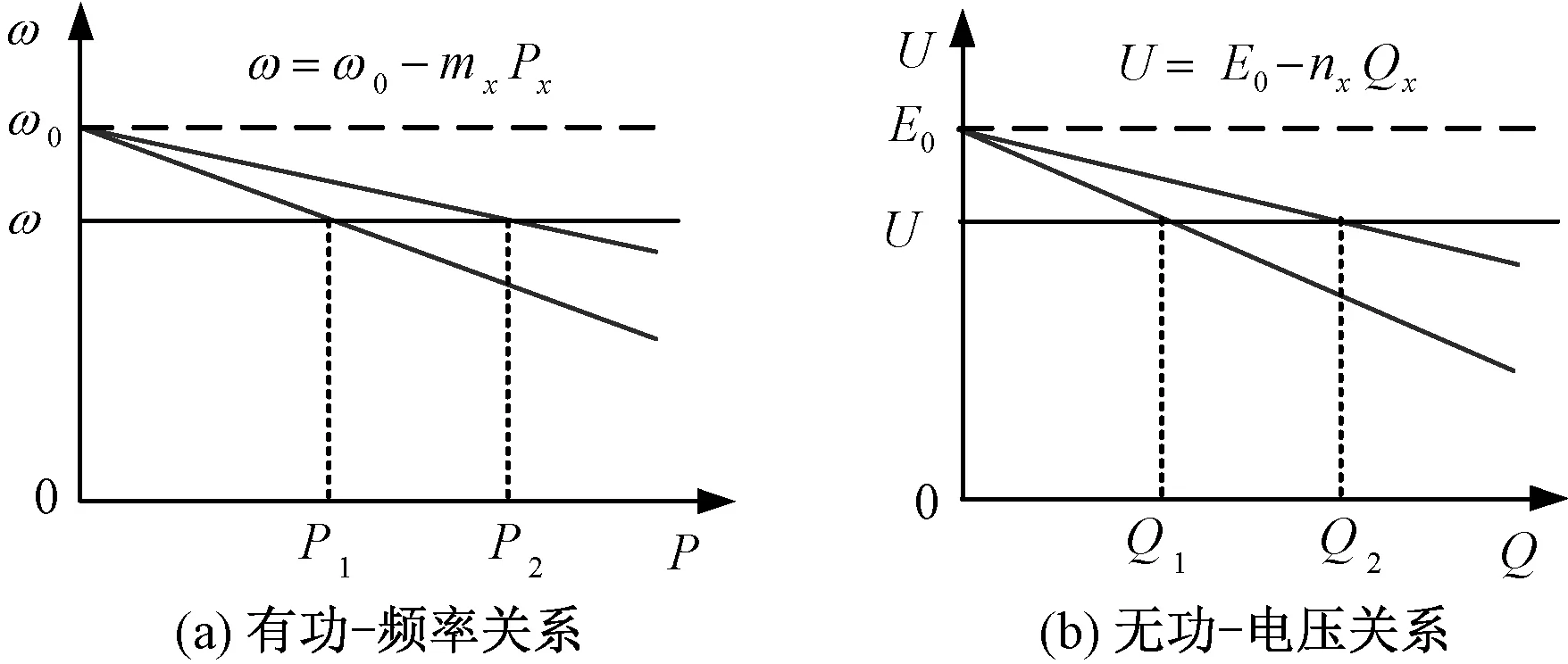
图3 下垂控制曲线Fig.3 Droop control curves
根据两台逆变器带负载并联运行等效电路和基尔霍夫电压(KVL)原理,得到逆变器输出电压与负载端电压之间的电路方程:
(5)
由于两台逆变器并联运行的等效电路是一个对称结构,因此以其中一台逆变器为例,将式(5)变换到d-q坐标系下:
(6)
同样,由于q轴与d轴的电压控制模型相同,但两者各自的电压给定值不同,q轴上的电压给定值为0,d轴上的电压给定值为E0,其数学表达式为:
(7)
式中,E0为d轴上的电压给定值。
当逆变器稳态运行时,如果其电压达到预先设置的给定值,那么在式(7)中分别加入电抗项X1iq1和-X1id1,保证逆变器的输出阻抗特性呈感性,即:
(8)
从式(8)中可以看出,d轴有功电流和q轴无功电流的电抗可以不同。从有功功率角度看,如果系统的电抗X越大,那么导致两台逆变器之间的联系变弱,容易失去同步运行;但从抑制系统环流角度来看,系统的电抗X越大,则系统的环流越小。因此,利用无功下垂控制系数nc与电抗X之间的关系,对式(8)引入额外的电抗:
(9)
式中,Qn包括虚拟电抗上的感性无功。
同样原理,为了使下垂控制能够正确工作,必须保证逆变器系统输出总阻抗呈感性。由于逆变器之间的线路距离不同,导致线路的电阻大小不同,因此对式(9)引入一定阻值的虚拟电阻r:
(10)
在实际微电网系统中,线路主要呈纯阻性或阻感性,因线路阻抗差异,传统下垂控制难以实现各台逆变器输出功率精确分配。当系统负载突变时,为了保证系统具有更好的动态功率调节性能,对传统下垂控制进行改进得到新型下垂控制,如式(11)所示:
(11)
式中,km、kn分别为有功、无功反馈系数;m、n分别为有功、无功下垂系数;np、nq分别为有功、无功微分系数。

图4 多闭环下垂控制框图Fig.4 Closed-loop droop control block diagram
引入虚拟阻抗的新型下垂控制的多闭环控制结构如图4所示。为了提高系统抗扰动能力,将负载电压作为反馈补偿,其中Zv为虚拟阻抗,包括虚拟电阻r和虚拟电抗X,通过调节系统阻抗大小可以保证并联逆变器系统实现功率精确分配。
4 系统仿真分析
在Matlab/Simulink软件中搭建两台容量相同的逆变器并联运行模型,验证本文采用的控制策略,具体仿真参数如表1所示。

表1 仿真参数表
图5 传统下垂控制仿真结果Fig.5 Traditional droop control simulation results

图6 新型下垂控制仿真结果Fig.6 New droop control simulation results
首先设置两台逆变器并联带负载1稳定运行,在0.2s时负载2投入,0.3s时切出,0.4s时逆变器2切出并联运行,仿真结果如图5和图6所示。图5(a)中,采用传统下垂控制时,两台逆变器按照设定的下垂系数输出有功、无功功率。由于各逆变电源之间的线路距离不同,导致逆变器输出总阻抗不同,在负载发生突变时,采用传统的下垂控制,两台逆变器无法精确分配各自出力,尤其是其输出无功功率存在明显的波动,严重影响了系统供电可靠性;图5(b)为系统交流母线电压有效值,在0.2s和0.3s负载2分别投入、切出、0.4s逆变器2切出并联运行时,电压幅值出现波动;图5(c)为三相负载电流波形,可以看出电流波形不稳定。
从图6(a)可知,在负载2投入、切出和逆变器2切出并联运行时,采用新型控制策略,负载突变瞬间两台逆变器输出功率没有出现明显波动,保证了系统向本地负载提供稳定功率,并实现了系统功率均分;图6(b)中,在0.2s和0.3s负载2分别投入、切出、0.4s逆变器2切出并联运行时,其波形与图5(b)大致相同;图6(c)中,在负载突变时,三相电流波形稳定,电流幅值能在短时间内恢复到稳定电流。
5 结论
由于微电网系统中各电源之间线路距离不同,导致线路阻抗大小存在差异,难以保证精确分配系统各逆变器输出功率。在传统下垂控制的基础上,本文通过引入虚拟阻抗解决线路阻抗大小不同带来的影响,同时加入功率微分项,在负载发生突变时,提高系统功率动态调节,避免逆变器输出电压幅值和频率过度跌落影响系统稳定。仿真分析验证了本文提出的控制策略的可靠性。
[1] 王成山, 李鹏 (Wang Chengshan, Li Peng). 分布式发电、微网与智能配电网的发展与挑战 (Development and challenges of distributed generation, the microgrid and smart distribution system) [J]. 电力系统自动化 (Automation of Electric Power Systems), 2010, 34(2): 10-16.
[2] Li Yunwei, Vilathgamuwa D M, Loh P C. Design, analysis, and real-time testing of a controller for multibus microgrid system [J]. IEEE Transactions on Power Electronics, 2004, 19(5): 1195-1204.
[3] Wang P, Goel L, Liu X, et al. Harmonizing AC and DC: A hybrid AC/DC future grid solution [J]. IEEE Power and Energy Magazine, 2013, 11(3): 76-83.
[4] 刘佳易, 秦文萍, 韩肖清, 等 (Liu Jiayi, Qin Wenping, Han Xiaoqing, et al.). 交直流双向功率变换器的改进下垂控制策略 (Control method of interlink-converter in DC micro-grid) [J]. 电网技术 (Power System Technology), 2014, 38(2): 304-310.
[5] Liu X, Wang P M, Loh P C. A hybrid AC/DC micro-grid and its coordination control [J]. IEEE Transactions on Smart Grid, 2011, 2(2): 278-286.
[6] 韩华, 刘尧, 孙尧, 等 (Han Hua, Liu Yao, Sun Yao, et al.). 一种微电网无功均分的改进控制策略 (An improved control strategy for reactive power sharing in micro-grids) [J]. 中国电机工程学报 (Proceedings of the CSEE), 2014, 34(16): 2639-2648.
[7] 张明锐, 杜志超, 黎娜, 等 (Zhang Mingrui, Du Zhichao, Li Na, et al.). 高压微网孤岛运行时频率稳定控制策略研究 (Control strategies of frequency stability for islanding high-voltage micro-grid) [J]. 中国电机工程学报 (Proceedings of the CSEE), 2012, 32(25): 20-26.
[8] 程军照, 李澍森, 吴在军, 等 (Cheng Junzhao, Li Shusen, Wu Zaijun, et al.). 微电网下垂控制中虚拟电抗的功率解耦机理分析 (Analysis of power decoupling mechanism for droop control with virtual inductance in a micro-grid) [J]. 电力系统自动化 (Automation of Electric Power Systems), 2012, 36(7): 27-32.
[9] De Brabandere K, Bolsens B, Van den Keybus J, et al. A voltage and frequency droop control method for parallel inverters [J]. IEEE Transactions on Power Electronics, 2007, 22(4): 1107-1115.
(,cont.onp.61)(,cont.fromp.25)
[10] Li Yan, Li Yunwei. Decoupled power control for an inverter based low voltage micro-grid in autonomous operation [A]. IEEE 6th International Power Electronics and Motion Control Conference [C]. Wuhan, China, 2009. 2490-2496.
[11] 刘喜梅,赵倩, 姚致清 (Liu Ximei,Zhao Qian,Yao Zhiqing). 基于改进下垂算法的同步逆变器并联控制策略研究 (Research on control strategy of parallel synchronous inverters based on improved droop algorithm) [J]. 电力系统保护与控制 (Power System Protection and Control), 2012, 40(14): 103-108.
[12] Yun Wei Li,Ching-nan Kao.An accurate power control strategy for power-electronics-interfaced distributed generation units operating in a low-voltage multibus micro-grid [J]. IEEE Transactions on Power Electronics,2009,24(12):2977-2988.
[13] 方天治, 阮新波, 肖岚, 等 (Fang Tianzhi,Ruan Xinbo,Xiao Lan,et al.). 一种改进的分布式逆变器并联控制策略 (An improved distributed control strategy of parallel inverters) [J]. 中国电机工程学报 (Proceedings of the CSEE),2008, 28(33):30-36.
New droop control strategy for parallel inverter with virtual impedance
XIE Yong-liu1, CHENG Zhi-jiang2, LI Yong-dong2, HU Xu-kun3, CUI Shuang-xi2, SU Cheng-bo1
(1. Power Supply Bureau of Sanming, Sanming 365000, China; 2. College of Electrical Engineering,Xinjiang University, Urumchi 830008, China; 3. Power Supply Bureau of Tongxiang,Tongxiang 314500, China)
Due to the different line distances between each of the inverters in the parallel operating micro-grid inverter system, resulting in its total output impedance different and presenting impedance characteristics, the traditional droop control can not be properly used, and the system can not achieve the accurate power distribution. To solve this problem, based on the traditional theory of the droop control algorithm, this paper proposes a new droop control strategy by introduction of a new virtual impedance. When the load mutates, the control strategy can guarantee bus voltage amplitude and frequency stable, suppress reactive circulation between the two inverters system, and precisely allocate active power and reactive power. The strategy further introduces the power differential part that can improve the system dynamic response. The simulation results verify the reliability of the control strategy.
micro-grid inverter; impedance characteristics; droop control; virtual impedance; reactive circulation
2014-07-04
国家自然科学基金资助项目(51567022)、 新疆研究生科研创新项目(XJGRI2014028)、科技支疆项目(2013911036)
谢永流(1987-), 男, 福建籍, 助理工程师, 硕士, 研究方向为微电网系统中逆变器的控制策略; 程志江(1977-), 男, 重庆籍, 副教授, 硕士生导师, 主要从事微电网系统的关键技术研究(通信作者)。
TM464; TM761
A
1003-3076(2016)03-0022-04