永磁同步电机变指数趋近律滑模控制
2016-05-16毛亮亮周凯王旭东
毛亮亮, 周凯, 王旭东
(哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨150080)
永磁同步电机变指数趋近律滑模控制
毛亮亮,周凯,王旭东
(哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨150080)
摘要:为取得系统对负载和参数扰动的高稳定性,同时避免滑模控制(SMC)具有的抖振现象,将一种新的滑模变结构控制策略应用于永磁同步电机(PMSM)驱动系统中。采用最大转矩电流比(MTPA)控制分配定子d、q轴电流,并将它们与转矩的关系拟合为低阶多项式,有效地提高了该方法的工程实用性;阐述了在系统存在性条件下改进的变指数趋近律控制策略,通过恰当地选取积分滑模面和切换增益,并将控制律连续化,有效地削弱了滑模控制方法的抖振问题。仿真与实验结果表明,该方法可以有效抑制系统抖振,改善系统鲁棒性,同时具有良好的动、静态性能。
关键词:永磁同步电动机;滑模变结构控制;最大转矩电流比;系统抖振;变指数趋近律
0引言
近年来,永磁同步电机(permanent magnet synchronous motor,PMSM)因其损耗少、效率高、节电效果明显的优点在生产和生活中越来越受到关注和应用,其驱动系统除了具有普通电气传动系统的共性外,还满足转矩输出能力高、调速范围宽、全速范围内运行效率高、环境适应性强、可靠性高等要求,使其在电动汽车领域大受欢迎[1]。对于电动汽车永磁同步电机矢量控制系统来说,电机在基速以下为恒转矩运行,采用最大转矩电流比(maximum torque per ampere,MTPA)控制,最大限度地利用内置式电机结构的磁阻转矩,可以提高单位定子电流的转矩输出能力,从而更好地适应车辆在启动、加速、负荷爬坡、频繁起停等复杂工况下的运行;反之可以在电机转矩输出相同的情况下,减小定子电流和铜耗,从而提高电机驱动系统的运行效率。为了进一步提高PMSM 最大转矩电流比控制系统的运行特性,许多学者将一些先进的控制理论和方法应用于MTPA控制并取得了很好的控制效果[2-4]。
滑模变结构控制(sliding mode variable structure control,SMVSC)是一种特殊的非线性控制,它的“状态结构”并不是一成不变,而是根据系统当前的状态实时变化,迫使系统的状态轨迹沿预定的“滑动模态”作小幅度、高频率的滑动。这种“滑动模态”设计简单,与控制对象的参数及扰动均无关,因此具有响应快速、对参数变化不敏感及外部扰动鲁棒性强等诸多优点。但同时这种控制方法也具有不可避免的缺点,即存在由滑模切换造成的高频抖振,因此如何消除抖振成为该控制理论应用于实际系统的研究热点[5-13]。文献[6-8]将滑模控制引入id=0矢量控制调速系统,有效地提高了系统的动态性能和鲁棒性。文献[7]选择一阶滑模面和状态反馈滑模控制的方法,将控制输出再经积分器滤波,设计复杂度几乎可以和PI控制器相当。文献[8]设计了一种基于变参数趋近律的滑模控制器,解决了普通滑模控制需要整定许多控制参数的问题。文献[9-11]将滑模控制应用于直接转矩控制,改善了直接转矩控制存在的电流、转矩脉动问题。文献[12-13]采用基于滑模观测器的无位置传感器方法预估电机位置和转速,获得了良好的稳态精确度。文献[12]采用自适应滑模观测器和高频信号注入法相结合的转速预估方法,提高了系统的低速特性和快速跟踪性能。然而以上文献都没有涉及到滑模控制在切换控制率或者改变切换增益时存在的滑模控制固有的抖振现象,这对于实际控制时系统的稳定性和高效性都有很大的负面影响,为此本文从消除系统抖振的角度出发,提出消除抖振改善鲁棒性的有效解决办法。
1永磁同步电动机数学模型
永磁同步电动机在d-q旋转坐标系中的定子电压方程可表示为
(1)
式中:ud、uq分别为d、q轴电压;id、iq分别为d、q轴电流;Ld、Lq分别为d、q轴电感;Rs为定子电阻;ψf为永磁体磁链;ωe为转子电角速度,p=d/dt。
电磁转矩方程为
Te=1.5p(ψfiq+(Ld-Lq)idiq)。
(2)
2滑模电流控制器的设计
将d、q轴电流误差ed、eq定义为状态变量,将定子电压ud、uq定义为控制输入,由式(1)可得电流环控制系统的状态空间方程为
(3)
传统滑模面的设计在跟踪指令信号时,如果遇到外部扰动,会引起系统稳态误差,而积分滑模面能够减小稳态误差,同时控制律中不会出现状态变量的二阶导数,实现起来比较简单。选取关于电流误差ed、eq的积分滑模面为
(4)
式中c1、c2为正常数。
常用的趋近律有指数趋近律、变速趋近律等。
1)指数趋近律:

(5)
2)变速趋近律:

(6)
提出了较优化的变指数趋近律。选取关于电流误差ed、eq的指数趋近律为
(7)
式中:ε1、η1、ε2、η2为正常数。
根据式(4)~式(6),将E1、E2视作扰动项,可以求得电流滑模控制律为
(8)
根据Lyapunov稳定性理论,滑动模态的存在性和可达性条件表示为

(9)
ε1>E1,ε2>E2。
(10)
由此可知,切换增益ε1、ε2的最小值只随着扰动项E1、E2的增大而增大。然而,切换增益如果变大也会导致系统抖振加剧。所以,如果加入负载观测器前馈补偿负载扰动,那么只要选取较小的切换增益便可满足系统鲁棒性条件,以达到削弱抖振的目的。
3MTPA控制的工程实现
主要研究电机在基速以下运行。采用最大转矩电流比控制方法。其轨迹如图1所示。
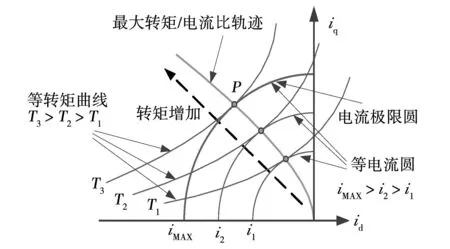
图1 最大转矩/电流比控制电流矢量轨迹Fig.1 Current vector trajectory of MTPA control
定子电流is与d轴夹角(即转矩角)为β,则d、q轴电流可表示为
(11)
电磁转矩电流比表示为

(12)
最大转矩电流比控制的实现条件可以转化为如下的极值问题:转矩电流比Te/is对β求解一、二阶偏导数,并要求一阶导数为零,二阶导数小于零,由此可以得到
(13)

(14)
上式成立表明转矩电流比存在极大值。
由式(16)、式(18)可得id、iq与is的函数关系为
(15)
由此可以看出,最大转矩电流比控制的实现需要根据式(15) 由is实时地计算出id、iq的函数值,相当于查表,求解方法计算量大,对控制芯片的要求度高。本文采用多项式拟合的方法求解最大转矩电流比关系。图2为利用Matlab得到的id、iq与is的理想函数曲线和一阶、二阶多项式拟合函数曲线,可以看出二者均有较好的契合度,综合考虑计算量与准确性,采用二阶拟合方法,所得公式如下,
(16)
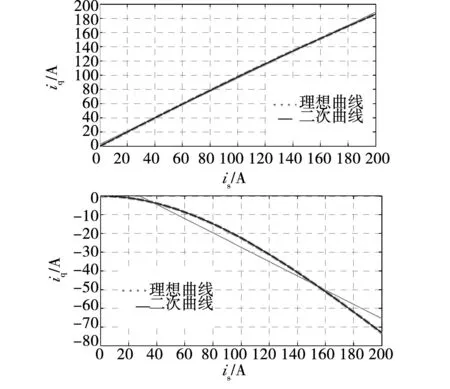
图2 id、iq与is的函数曲线Fig.2 Function curves of id-is and iq-is
4仿真结果与分析
在SIMULINK环境下建立了如下仿真模型,如图3所示。相关电机参数如下:额定功率30kW,额定转速2 000r/min,额定转矩150N·m,两种情况下电极都稳定运行于1 000r/min,分别带负载86N·m和190N·m。
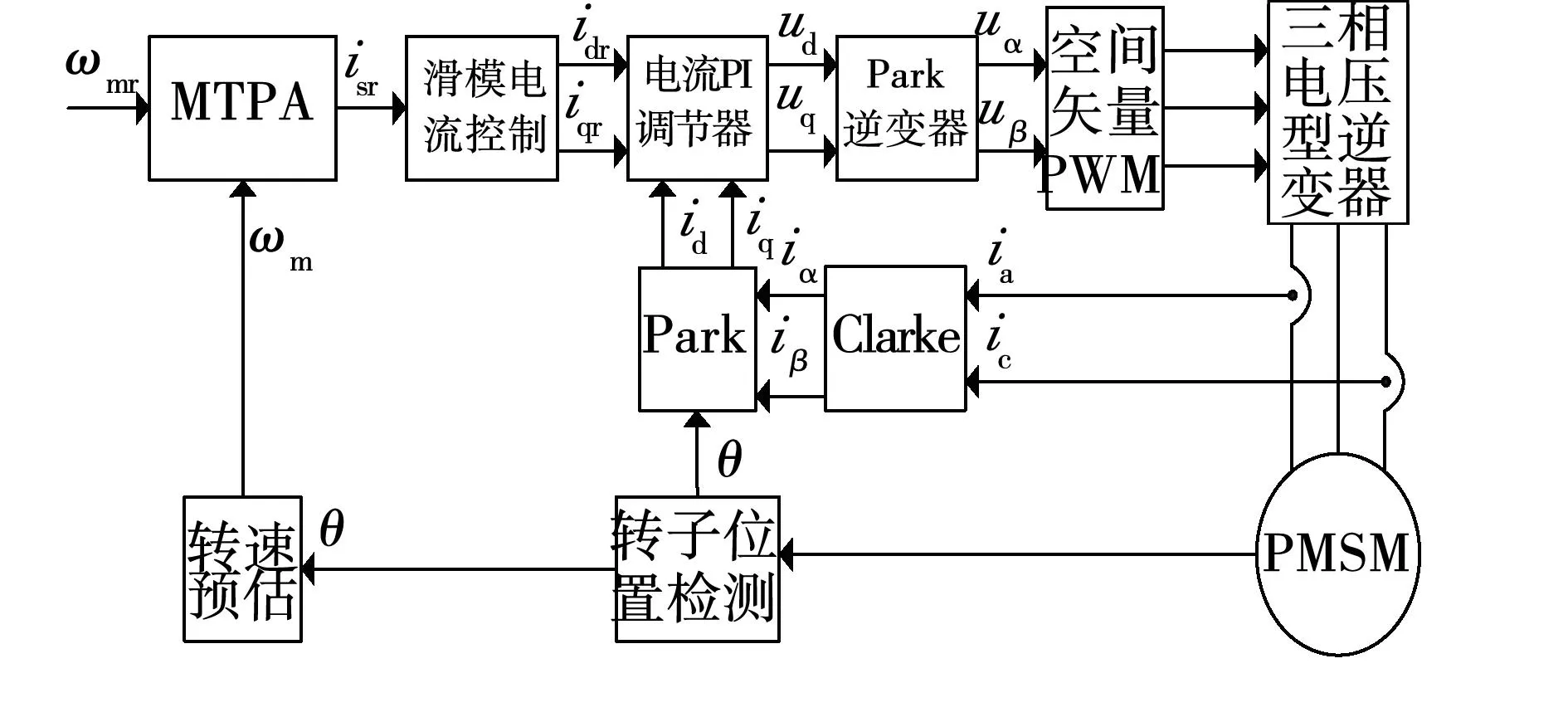
图3 系统结构框图Fig.3 System structure diagram
定子相电阻Rs=0.03Ω,Ld=0.22mH,Lq=0.61mH,永磁体磁链ψf=0.070 9Wb,极对数p=8。
图4是分别采用指数趋近律、变速趋近律和变指数趋近律滑模控制时的电流响应对比图。图中可以看出,在进入滑模面后,指数趋近律与变速趋近律均存在较大的抖振且电流冲击也较大;变指数趋近率控制在快速趋近滑模面的同时还可以削弱抖振。

图4 不同趋近律电流响应曲线对比Fig.4 Comparisons of speed responses between different reaching laws
图5是采用改进滑模控制和PI控制时的电流响应对比图,从图中可以看出,应用所提出的方法取得的电流稳态值更加接近给定值,相对抖动较小,并且这种优势将随着负载及转速的增加尤为明显。

图5 两种策略的电流控制响应曲线对比Fig.5 Comparisons of current responses in d-q frame between PI and improved sliding mode
5实验结果与分析
控制器的参数如下:等速趋近率系数ε=1.0,指数趋近率系数η=15.0;滑模面积分系数c0=0.01,比例系数c1=1.0;控制律连续系数δ=0.5。电流PI控制器参数如下:电流控制器系数kdp=1.5,kip=0.006;kdq=2.0,kip=0.003。
图6、图7、图8分别是采用三种趋近律滑模速度控制时的突加负载动态响应曲线,给定转速指令始终为3 000r/min,在0.4s时刻突加负载转矩为200N·m。从图中可以看出,在动态过程中,采用变指数趋近律控制时的转速脉动很小并迅速恢复,电流动态响应时间更短,最大超调量更小,稳态抖振也更小。因此,改进趋近律方法可以使系统获得更好的抗扰动特性和减小抖振效果,对负载扰动的鲁棒性更强。

图6 指数趋近律负载响应曲线Fig.6 Current responses of exponent reaching law

图7 变速趋近律负载响应曲线Fig.7 Responses of variable speed reaching law

图8 变速趋近律负载响应曲线Fig.8 Responses of variable exponent reaching law
图9为实验台架,电机及控制器均为自行研制。

图9 实验台架系统Fig.9 Bench test system and controller
6结论
本文将工程化的最大转矩电流比控制和变指数趋近律滑模控制策略综合应用于永磁同步电机驱动系统中,针对滑模控制系统固有的抖振问题,通过适当选取趋近律和积分滑模面,并将控制律连续化,有效地削弱了系统抖振现象。与常规趋近律相比,在控制量靠近滑模边界时稳定性有了显著提高。特别针对所处环境复杂且不稳定的电动车用永磁同步电机效果明显。
参 考 文 献:
[1]YANG Qian,KANG Zhiqiang,ZHANG Minghui,et al.Study on space vector PWM technology of PMSM control system based on dSPACE[C]// IEEE International Conference on Information and Automation,August 26-28,2013,Yinchuan,Ningxia,China:ICIA,2013:576-580.
[2]NIAZI P,TOLIYAT H A,GOODARZI A.Robust maximum torque per ampere (MTPA) control of PM-assisted SynRMcfor traction applications [J].IEEE Transactions on Vehicular Technology,2012,56(4):1538-1545.
[3]郭庆鼎,陈启飞,刘春芳.永磁同步电机效率优化的最大转矩电流比控制方法[J].沈阳工业大学学报,2008,30(1):1-5.
GUO Qingding,CHEN Qifei,LIU Chunfang.Efficiency optimization control of PMSM based on maximum ratio of torque to current[J].Journal of Shenyang University of Technology,2008,30(1):1-5.
[4]张伦健,陈利萍.基于智能PI的永磁同步电动机近似最大转矩电流比控制[J].微特电机,2012, 40(8):42-45.
ZHANG Lunjian,CHEN Liping.Maximum Torque per ampere control in permanent magnet synchronous motor based on intelligent PI controller [J].Small & Special Electrical Machines,2012,40(8):42-45.
[5]付敏,陈洋.U型单相永磁同步电机振动及噪声的有限元分析[J].哈尔滨理工大学学报,2015,20(3):86-90.
FU Min,CHEN Yang.The vibration and noise finite element analysis of U type single phase permanent magnet synchronous motor[J].Journal of Harbin University of Science and Technology,2015,20(3):86-90.
[6]JIN Ningzhi,WANG Xudong,WU Xiaogang.Current sliding mode control with a load sliding mode observer for permanent magnet synchronous machines [J].Journal of Power Electronics,2014,14(1):105-114.
[7]张细政,王耀南,杨民生.永磁同步电机无位置传感器双滑模鲁棒控制[J].电机与控制学报,2008,12(6):696-700.
ZHANG Xizheng,WANG Yaonan,YANG Minsheng.Doubly-sliding-mode based sensorless robust control of PMSM [J].Electric Machines and Control,2008,12(6):696-700.
[8]张晓光,孙力,赵克.基于负载转矩滑模观测的永磁同步电机滑模控制[J].中国电机工程学报,2012,32(3):111-116.
ZHANG Xiaoguang,SUN Li,ZHAO Ke.Sliding mode control of PMSM based on a novel load torque sliding mode observer [J].Proceedings of the CSEE,2012,32(3):111-116.
[9]汪海波,周波,方斯琛.永磁同步电机调速系统的滑模控制[J].电工技术学报,2009,24(9):71-77.
WANG Haibo,ZHOU Bo,FANG Sichen.A PMSM sliding mode control system based on exponential reaching law [J].Transanctions of China Electrotechnical Society,2009,24(9):71-77.
[10]童克文,张兴,张昱,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电机工程学报,2008,28(21):102-106.
TONG Kewen,ZHANG Xing,ZHANG Yu,et al.Sliding mode variable structure control of permanent magnet synchronous machine based on a novel reaching law [J].Proceedings of the CSEE,2008,28(21):102-106.
[11]邱赫男,王旭东,李志伟,等.基于五段式SVPWM的永磁同步电机反馈线性化直接转矩控制[J].哈尔滨理工大学学报,2015,20(6):65-70.
QIU Henan,WANG Xudong,LI Zhiwei,et al.Feedback linearization direct torque control of permanent magnet synchronous motor based on five-stage SVPWM [J].Journal of Harbin University of Science and Technology,2015,20(6):65-70.
[12]夏长亮,刘均华,俞卫,等.基于扩张状态观测器的永磁无刷直流电机滑模变结构控制[J].中国电机工程学报,2006,26(20):139-143.
XIA Changliang,LIU Junhua,YU Wei,et al.Variable structure control of BLDCM based on extended state observer[J].Proceedings of the CSEE,2006,26(20):139-143.
[13]FOO Gilbert,RAHMAN M F.Sensorless sliding-mode MTPA control of an IPM synchronous motor drive using a sliding-mode observer and HF signal injection[J].IEEE Transactions on Industrial Electronics,2011, 57(4):1270-1278.
(编辑:张楠)
Variable exponent reaching law sliding mode control of permanent magnet synchronous motor
MAO Liang-liang,ZHOU Kai,WANG Xu-dong
(School of Electrical & Electronic Engineering,Harbin University of Science and Technology,Harbin 150080,China)
Abstract:To achieve high stability of system to the parameters and load disturbances,while avoiding sliding mode control (SMC) chattering,a new variable structure control policy was introduced into a permanent magnet synchronous motor (PMSM) drive system.By using maximum torque per ampere control to distribute stator d,q-axis currents,and fitting their relationship with the torque for low-order polynomials,the engineering practicability of MTPA method was improved;the variable exponential reaching law control strategy was analyzed under the existence conditions set forth in the system,by properly selecting switch gain and integral sliding surface,realizing continuous control law,and the chattering problem was effectively weakened in the SMC system.Simulation and experimental results show that this method effectively suppresses system chattering,improves system robustness,and also is of good dynamic and static performance.
Keywords:permanent magnet synchronous motor;sliding mode variable structure control;maximum torque per ampere;system chattering;variable exponent reaching law
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2016)04-0106-06
DOI:10.15938/j.emc.2016.04.015
通讯作者:毛亮亮
作者简介:毛亮亮(1987—),男,博士研究生,研究方向为电力电子、电机控制;王旭东(1956—),男,教授,博士生导师,研究方向为电力电子、汽车电子、新能源汽车。
基金项目:国家青年科学基金(51507042);黑龙江省教育厅科学技术研究项目(12541158)
收稿日期:2014-08-17
周凯(1981—),男,博士,副教授,硕士生导师,研究方向为汽车ABS、车身电子装置等;