基于CESO磁链观测器的模型参考自适应感应电机转速辨识
2016-05-16韦文祥刘国荣
韦文祥, 刘国荣
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.湖南科技大学 信息与电气工程学院,湖南 湘潭 411201;3.湖南工程学院 电气与信息工程系,湖南 湘潭 411101)
基于CESO磁链观测器的模型参考自适应感应电机转速辨识
韦文祥1,2,刘国荣3
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.湖南科技大学 信息与电气工程学院,湖南 湘潭 411201;3.湖南工程学院 电气与信息工程系,湖南 湘潭 411101)
摘要:针对感应电机无速度传感器矢量控制下的速度辨识问题,设计了一种基于扩展状态观测器的闭环转子磁链观测器(CESO),并提出以其作为参考模型的模型参考自适应(CESO-MRAS)转速辨识方法。该磁链观测器将模型中不确定部分进行状态扩展并反馈补偿,是一种闭环观测器,因而对电机转子电阻变化以及外部扰动具有良好的鲁棒性,克服了传统电压转子磁链模型的纯积分和低速区的电压降问题。通过与传统MRAS的仿真比较研究,在转子电阻和转矩的大范围变化低速区,该算法能显著提高矢量控制系统的速度动态辨识能力和转矩抗扰能力。仿真和实验结果验证了该方法的正确性和有效性。
关键词:感应电动机;闭环扩展状态观测器;模型参考自适应;转子磁链观测;转速辨识
0引言
在有速度传感器的感应电机矢量控制系统中,在电机机端安装光电脉冲编码器是一种实用而有效的转速检测方法,但有速度传感器增加了系统的成本和复杂性,降低了系统的可靠性。无速度传感器技术可简化系统结构,提高系统可靠性,已成为感应电机控制领域的热门研究课题之一。
近年来,国内外学者提出了多种感应电机转速辨识方法[1-17],如滑模观测器[1-3]、扩展卡尔曼观测器[4,5]、注入信号法[6]、优化电压模型法[7]和模型参考自适应系统方法[8-17]。基于感应电机理想模型和稳定性理论的模型参考自适应系统(model reference adapt system,MRAS)具有稳态精确度较高、算法较简单的优点,且参数辨识的渐近收敛性由Lyapunov方程和Popov超稳定性理论保证,此参数辨识方法受到广泛关注,已经被提出并应用于感应电机无速度传感器矢量控制系统中[9]。
依据参考模型与可调模型的不同选择,基于MRAS的转速辨识方法也多样化。参考模型本身参数的准确度是影响速度辨识精确度的关键,所以参考模型的选择是研究难点,其中研究最多的是以电压模型为参考模型,以包含转速和转子电阻的电流模型为可调模型的MRAS转速辨识法[8-17],该方法实用性强,但存在积分初值和漂移问题,为了解决积分问题。文献[8]采用了改进磁链观测器的MRAS的转速辨识方法,在参考模型中引入定子磁链补偿电压,而定子磁链在低速区受定子电阻变化影响,导致参考模型的精确度存在诸多不确定性。文献[10]采用了基于反电动势的MRAS的转速辨识方法,避开了参考模型的纯积分问题,但低速时反电势变化小,算法对定子电阻的变化鲁棒性差,辨识的动态误差较大。文献[12]提出的MRAS转速辨识方法中,以感应电机模型为参考模型,以双电流模型为可调模型,克服了电压模型的不足,算法对电机参数变化的鲁棒性强,但未考虑电机参数大范围变化时的转速辨识问题。文献[13-14]提出了一种基于双参数的MRAS转速辨识方法,对定子电阻辨识以提高参考模型的精确度。文献[15-17]提出了一种基于变结构的MRAS转速辨识方法,以滑模控制策略替代MRAS中PI自适应率,克服了MRAS对系统参数变化时边界难于确定的不足,但未对电压参考模型带来的积分问题提出解决方案。
以上提到的MRAS转速辨识方案中参考模型均采用开环观测方法,观测精确度依赖于感应电机的部分参数和电流电压传感器的测量精确度,降低了辨识算法的鲁棒性。
本文提出一种基于闭环扩展状态观测器(closed loop extended state observer,CESO)磁链观测的MRAS感应电机转速辨识方法,作为参考模型的CESO磁链观测器不依赖于电机参数,在低速区也能准确辨识转子磁链。磁链CESO利用状态扩展和闭环补偿方法,保证了电机参数发生变化的情况下的转子磁链观测精确度。解决了传统电压模型的积分初值和直流偏置问题,消除了低速时转子电阻变化对转速辨识的影响,提升转矩的抗扰能力,最后利用Popov超稳定性理论分析了系统的稳定性。仿真和实验结果验证了算法的有效性。
1基于CESO的MRAS的转速辨识
1.1基于MRAS的转速辨识原理
MRAS是一种基于稳定性设计的参数辨识方法,保证了参数辨识的渐近收敛。其主要思想是将不含未知数的方程作为参考模型,而将包含待辨识参数的方程作为可调模型,利用两个模型中相同物理意义的输出量误差构成合适的自适应律来实时调节可调模型的待测参数,最终达到控制对象的输出跟踪参考模型的目的。
两相静止坐标上的转子磁链电压模型可表示为
(1)
两相静止坐标系上的转子磁链电流模型表示为
(2)

图1 基于MRAS的转速辨识原理框图Fig.1 Speed estimation structure based on MRAS
上述MRAS转速辨识方法中参考模型大多采用电压模型,因具有算法简单和电机转子参数影响小的优势,但定子电阻压降、纯积分环节等问题影响了低速区的转速辨识精度和系统稳定性。
2基于ESO的转子磁链观测模型
利用扩展状态观测器(extended state observer,ESO)进行转子磁链观测时,可根据观测所得磁链进行反馈补偿与否分为开环ESO和闭环ESO两种。以观测器结构和补偿方法对两种ESO观测器进行推导。
2.1开环ESO观测器
选择定子电流、转子磁链为状态变量,则感应电机在两相静止坐标系的状态方程为[18]
(3)
在感应电机大转矩低速运行时,电机参数Rr变化明显[19],如何减小Rr的影响是提高磁链观测精确度的关键因素。将式(3)中电流动态方程进行整理,把带有转子电阻项合并在一起,得到
(4)
不妨定义新的状态量w1、w2为:
(5)
w(t)=[w1(t) w2(t)]T代表式(4)中的不确定项,结合式(3)中磁链动态方程可知w(t)为转子磁链导数,利用ESO观测到w(t)即可得到转子磁链。

(6)
可构造转子磁链观测器的开环ESO为[19]:
(7)

2.2闭环ESO观测器
针对磁链开环ESO中的不足,可以将式(5)中转子电阻分解为模型设定值和不确定变化值,同时将将观测到的电流值、磁链观测值反馈到已知转子磁链观测器中,形成闭环结构,该结构有利于降低模型的不确定程度,减小观测运算量,增强自适应调节能力,CESO观测器如图2所示。
重新整理不确定项,并定义新的状态变量w3、w4为
(8)
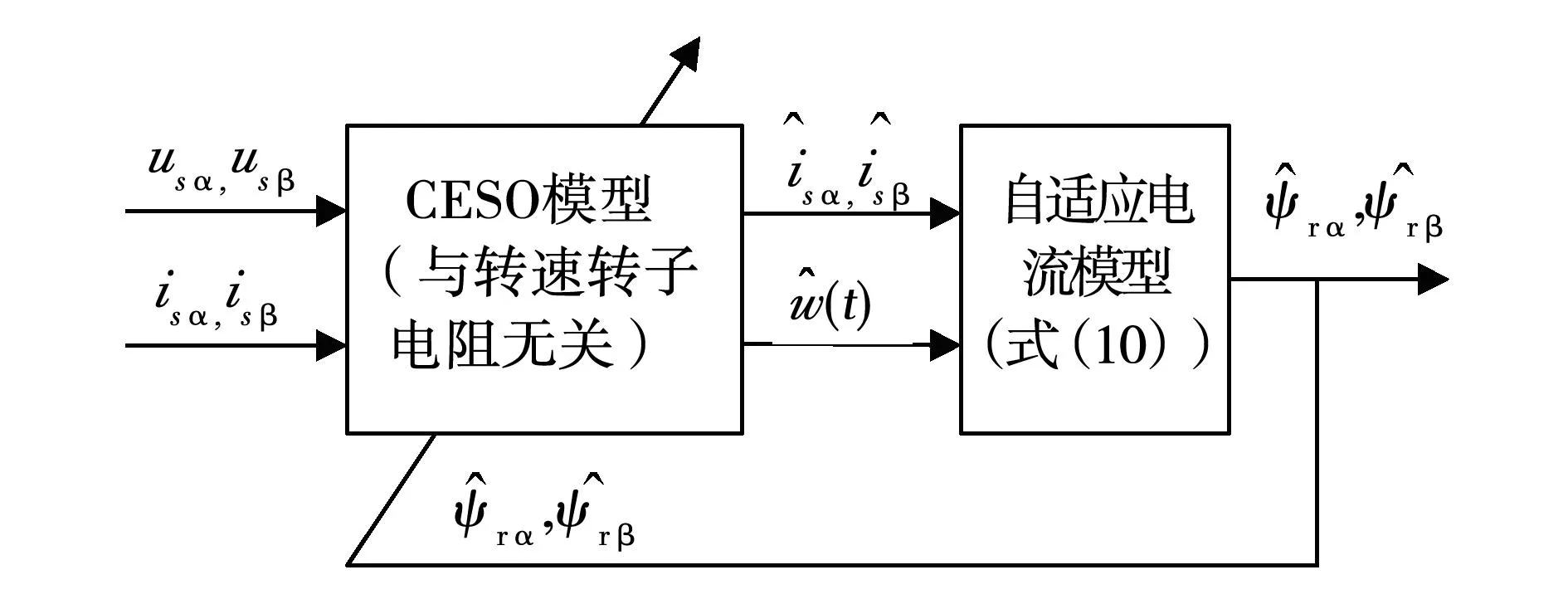
图2 闭环ESO磁链观测器结构图Fig.2 CESO based Flux estimation structure
可构造转子磁链观测器CESO为:
(9)
(10)
在转子磁链CESO中,确定项使用转子电阻设定值Rr0,分离不确定项并采用ESO进行观测,再与反馈的电流、磁链的观测值代入磁链方程构成闭环观测器。改进后的磁链观测器进行了模型补偿,不确定的未知模型逐渐减小,消去了转子电阻变化对磁链观测的影响。合理选择CESO的反馈函数g(x)参数可使观测误差的积累按指数减小,可以有效解决积分饱和及直流偏置问题,本仿真整定的g(x)参数为[β1,β2,α1,α2,δ]=[218.5,1155.2,0.5,0.25,0.001]。因此,转子磁链CESO是精确的磁链观测参考模型。
3转速辨识系统的稳定性分析
MRAS的设计依赖于PopoV超稳定性理论,可等价于一典型反馈系统(如图3)的稳定特性研究。

图3 非线性反馈系统Fig.3 Nonlinear feedback system
该系统保证全局稳定要满足如下条件:
条件1:前向线性不变量系统的传递函数是严格正实的;
条件2:反馈非线性时变系统满足PopoV不等式
在齿轮所受各向分力已知的条件下,轴承轴向力由轴承类型、支承形式和安装方式等因素决定,根据已有文献,总结计算方法[7],[11-13]简述如下:

(11)
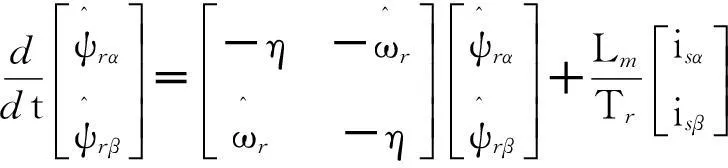
由式(3)可得到两相静止坐标系下的转子磁链模型

(12)
式(12)中的ωr视为常数,则电流模型变为一个线性状态方程[9],并构造参数可调的转子磁链估计模型为
(13)
根据MRAS原理,寻找合适的自适应律,不妨定义状态误差

(14)

(15)
将式(13)减去式(12)可得到误差状态方程

(16)

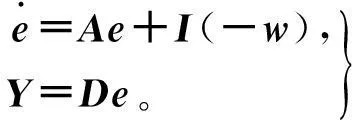
(17)
根据PopoV超稳定性理论可知,式(17)应满足PopoV不等式(11)
将式(17)代入式(11),不等式可写为

(18)
不妨取PI自适应律,则可推得角速度ωr的辨识公式为

(19)
将式(19)代入式(18),再根据不等式(20)可知式(17)满足PopoV不等式。

(20)
因此,PI自适应律机制满足PopoV不等式,式(17)中的线性补偿矩阵D可保证前向模块严格正实。所以该MRAS转速辨识方法满足PopoV定理且系统稳定。
4仿真与实验研究
4.1仿真结果与分析
为了验证提出辨识算法的有效性,采用Matlab 2010b的SIMULINK工具箱,针对基于IFOC的感应电机控制系统建立仿真模型,将传统的MRAS方法和本文的CESO-MRAS方法分别进行转速估计并反馈构成闭环运行方式,对两种方法的辨识性能进行仿真比较。仿真实验中测试电机参数如表1所示。
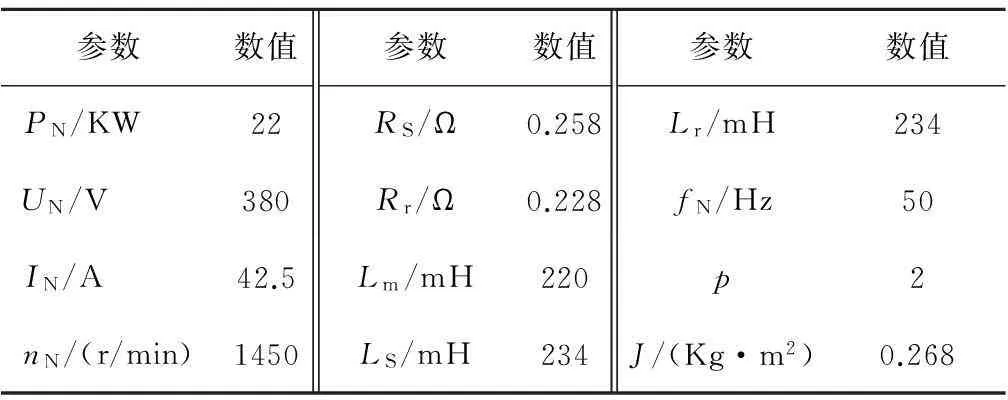
表1 测试电机参数
在转速辨识的仿真的过程中,电机转速初始值为额定转速1 450 r/min,并在2 s和4 s时依次变化为750、100 r/min,初始给定负载转矩为30 N·m,在中速段3 s时转矩增加到额定值150 N·m,图4给出了变转速变负载时采用两种算法的转子磁链观测、转速辨识和转矩响应仿真曲线图。

图4 转子电阻不变的转速和磁链估计曲线Fig.4 Speed and rotor flux estimation with constant rotor resistance
图4的仿真结果表明,假定系统在恒定Rr0且变负载运行时,两种辨识方法在高速段辨识转速变化平缓且稳态时跟踪性能较好,但在低速时传统MRAS方法因转子磁链电压模型中的纯积分环节的影响,导致转子磁链明显偏离参考值,此时转速辨识也出现明显波动,低速区最大误差达到4.0%,转矩脉动明显,在CESO-MRAS方法的转速辨识中,提高了辨识精确度,低速区的转矩响应也得到了较好的改善,低速区最大转速误差仅为1.5%,转矩脉动减小。
为验证低速区转子电阻Rr的变化对转速辨识的影响,在仿真过程中t=2 s时将Rr增加到1.5Rr0,依照表1参数执行仿真实验。图5给出了感应电机负载TL和Rr同时变化时传统MRAS和CESO-MRAS的磁链、转速辨识和转矩响应仿真曲线图。
图5的仿真结果表明,当Rr由额定值Rr0增加到1.5Rr0后,采用MRAS辨识方法转速辨识曲线波动幅度增加,辨识误差达到5.0%,所观测磁链波动明显,转矩脉动幅度加大,而采用CESO-MRAS方法时转速辨识误差小,仅为2.4%,转子磁链基本保持不变,转矩的抗扰性能优于前者。
由此可见,CESO-MRAS兼有MRAS和CESO观测器的优点,CESO观测器提升了系统对电机参数变化和外部负载扰动的抗扰能力,提高了转子磁链观测精确度和转速辨识精确度。尤其在大转矩的低速段,转子电阻变化明显,MRAS辨识方法受影响较大,而CESO-MRAS辨识方法此阶段能够保证转速辨识精度和转矩抗扰能力。

图5 变转子电阻的转速和磁链估计曲线Fig.5 Speed and rotor flux estimation with variable rotor resistance
4.2实验结果与分析
为了进一步验证CESO-MRAS辨识算法的有效性,在感应电机变频调速实验平台上进行实验,利用转速估计值反馈并闭环运行。系统控制板采用TMS320F28335处理器,PWM开关频率限幅值设置为5 KHz,采样周期为25 us。实验系统构成如图6所示。

图6 实验系统构成Fig.6 Experimental system structure

图7 感应电机矢量控制系统框图Fig.7 Vector control Induction motor system scheme
图8、图9中感应电机首先以30 N·m的轻载启动至100 r/min,待转速稳定后加载到接近额定转矩(约150N·m)运行,随后再提升转速至300 r/min进行比较运行。由图可见,系统在100 r/min的低速段稳态运行时,采用CESO-MRAS方法的转速辨识值保持了较好的精确度,在误差小于2.5%,在增加负载时,转速辨识值与设定值跟踪良好,能够快速恢复到静态无超调状态。而采用MRAS方法的转速辨识在负载变化时转速波动明显,100 r/min的低速段稳态辨识误差达到5.0%,且转矩脉动现象明显加剧。在转速300 r/min运行时,采用MRAS方法,转矩脉动明显,转速误差偏大,而CESO-MRAS方法在辨识误差和转矩脉动方面都明显优于前者。
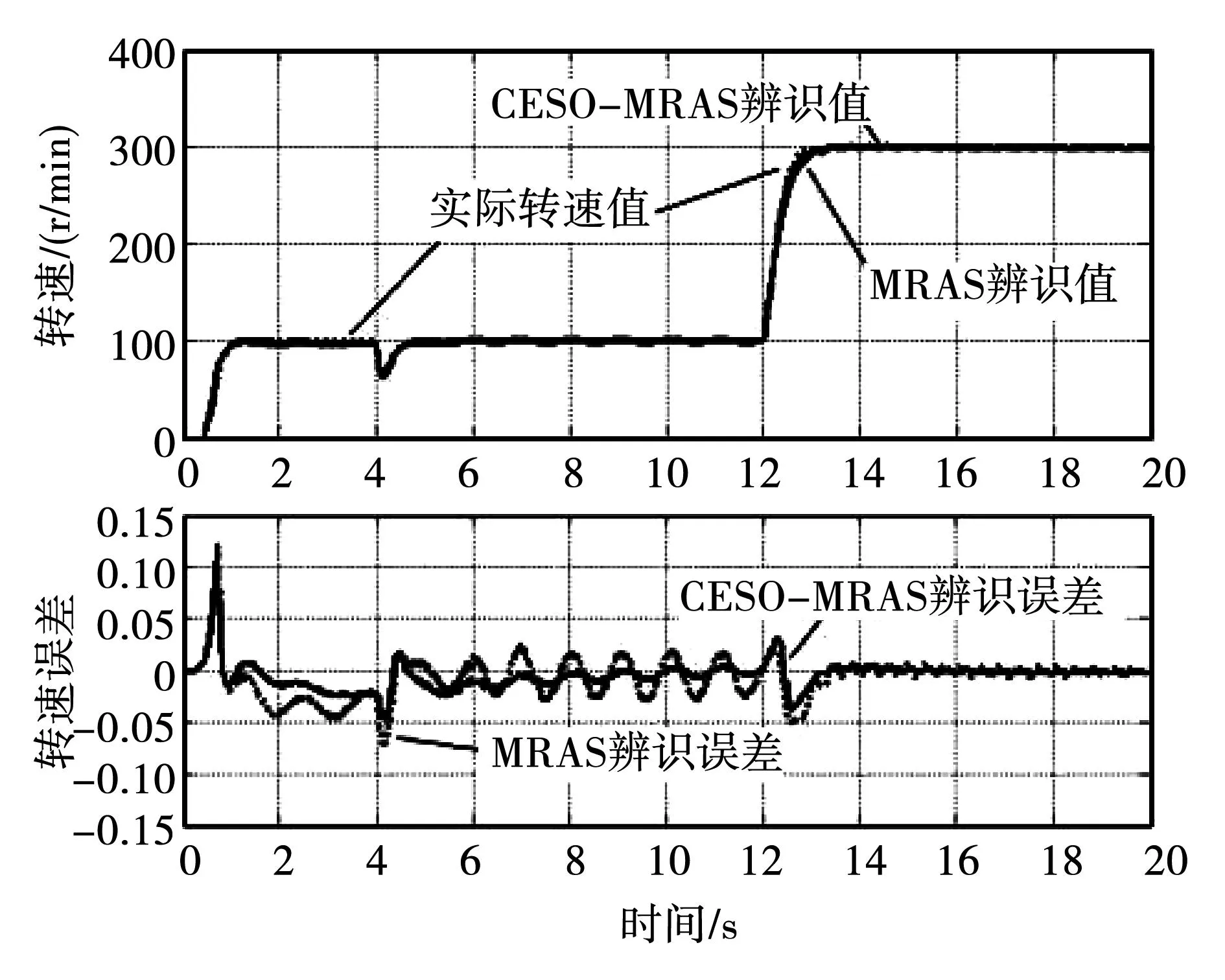
图8 负载变化时转速波形Fig.8 Experimental speed response with variable torque

图9 负载变化时转矩波形Fig.9 Experimental torque response wave
5结论
本文设计了一种新颖的模型参考自适应(CESO-MRAS)观测器,用于感应电机无速度传感器矢量控制系统的转速辨识。该方法结合了CESO磁链观测器和MRAS方法的优势,实现了对参考模型的精确、快速跟踪,并满足系统稳态误差和稳定性要求。仿真和实验结果表明,与MRAS转速辨识方法相比,CESO-MRAS兼有MRAS和CESO观测器的优点,其中CESO观测器提升了系统对电机参数变化和外部负载扰动的抗扰性,提高了转子磁链观测和转速辨识精确度。在转子电阻变化明显的低转速运行阶段,采用CESO-MRAS辨识方法转速辨识精确度小,转矩响应脉动小,转速辨识精确度和抗扰能力均优于MRAS方法。
参 考 文 献:
[1]NIHAT I.A robust sliding mode flux and speed observer for speed sensorless control of an indirect field oriented induction motor drives[J].Electric Power Systems Research,2007,(77): 1681-1688.
[2]AANAN D.Speed-sensorless control of induction motor using a continuous control approach of sliding-mode and flux observer[J].IEEE Transactions On Industrial Electronics,2005,52(4): 1170-1176.
[3]王庆龙,张兴,张崇巍.永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J].中国电机工程学报,2014,34(6):897-902.
WANG Qinglong,ZHANG Xing,ZHANG Chongwei.Double sliding-mode model reference adaptive system speed identification for vector control of permanent magnet synchronous motors[J].Proceedings of the CSEE,2014,34(6):897-902.
[4]BARUT M,BOGOSYAN S,GOKASAN M.Speed-sensorless estimation for induction motors using extended kalman filters[J].IEEE Transactions on Industrial Electronics,2007,54(1): 272-280.
[5]尹忠刚,赵昌,钟彦儒.采用抗差扩展卡尔曼滤波器的感应电机转速估计方法[J].中国电机工程学报,2012,32(18):152-159.
YIN Zhonggang,ZHAO Chang,ZHONG Yanru.A speed estimation method of induction motors using the robust extended kalman filter[J].Proceedings of the CSEE,2012,32(18):152-159.
[6]MARKO H,VELIMATTI L,JORMA L.Flux observer enhanced with low-frequency signal injection allowing sensorless zero-frequency operation of induction motors[J].IEEE Transactions On Industrial Electronics,2005,4(1): 52-59.
[7]BOTTGLIERI G,SCELBA G,SCARCELLA G.Sensorless speed estimation in induction motor drives[J].Electric Machines and Drives Conference,2003.IEMDC'03.IEEE International,2003,1:624-630.
[8]陈振锋,钟彦儒,李洁,等.基于改进磁链观测器的感应电机转速辨识[J].电工技术学报,2012,27(4): 42-47.
CHEN Zhenfeng,ZHONG Yanru,LI Jie.Speed identification for induction motor based on improved flux observer[J].Transactions of China Electrotechnical Society,2012,27(4): 42-47.
[9]SCHAUDER C.Adaptive speed identification for vector control of induction motors without rotational transducers[J].IEEE Transactions on Industry Applications,1992,28(5): 1054-1061.
[10]YANG G,TUNGHAI C.Adaptive speed identification scheme for a inverter-induction motor drive[J].IEEE Transactions on Industry Applications,1993,29(4): 820-825.
[11]SUMAN M,CHANDAN C.Model reference adaptive controller-based rotor resistance and speed Estimation techniques for vector controlled induction motor drive utilizing reactive power[J].IEEE Transactions on Industry Applications,2008,55(2): 594-601.
[12]TERESA O K,MATEUSZ D.Stator-current-based MRAS estimator for a wide range speed-sensorless induction-motor drive[J].IEEE Transactions On Industrial Electronics,2010,57(4): 1296-1308.
[13]尹忠刚,刘静,钟彦儒,等.基于双参数模型参考自适应的感应电机无速度传感器矢量控制低速性能[J].电工技术学报,2012,27(7): 124-130.
YIN Zhonggang,LIU Jing,ZHONG Yanru.Low-speed performance for induction motor sensorless vector control based on two-parameter model reference adaptation[J].Transactions of China Electrotechnical Society,2012,27(7): 124-130.
[14]LI Zhen,LONG Yaxu.Sensorless field orientation control of induction machines based on a mutual MRAS scheme [J].IEEE Transactions on Industrial Electronics,1998,45(5): 824-831.
[15]张勇军,孙寅飞,王京.基于单维离散滑模的模型参考自适应转速辨识方法[J].电工技术学报,2012,27(4): 54-58,64.
ZHANG Yongjun,SUN Yinfei,WANG Jing.A speed estimation algorithm based on single-manifold discrete time sliding mode model reference adaptive system[J].Transactions of China Electrotechnical Society,2012,27(4): 54-58,64.
[16]王庆龙,张崇巍,张兴.交流电机无速度传感器矢量控制系统变结构模型参考自适应转速辨识[J].中国电机工程学报,2007,27(15): 70-74.
WANG Qinglong,ZHANG Chongwei,ZHANG Xing.Variable-structure MRAS speed identification for speed sensorless vector control of induction motor[J].Proceedings of the CSEE,2007,27(15): 70-74.
[17]王庆龙,张崇巍,张兴.基于变结构模型参考自适应系统的永磁同步电机转速辨识[J].中国电机工程学报,2008,28(9):71-75.
WANG Qinglong,ZHANG Chongwei,ZHANG Xing.Variablestructure MRAS speed identification for permanentmagnet synchronous motor[J].Proceedings of the CSEE,2008,28(9):71-75.
[18]陈伯时.电力拖动自动控制系统[M].北京: 机械工业出版社,2003: 200-214.
[19]林飞,张春朋,宋文超,等.基于扩张状态观测器的感应电机转子磁链观测[J].中国电机工程学报,2003,23(4): 145-147.
LIN Fei,ZHANG Chunpeng SONG Wenchao.Flux observer of induction motor based on extended state observer[J].Proceedings of the CSEE,2003,23(4): 145-147.
(编辑:贾志超)
Speed identification for induction motor based on CESO flux observer and MRAS
WEI Wen-xiang1,2,LIU Guo-rong3
(1.College of Electrical and Information Engineering,Hunan University,Changsha 410082,China;2.Information & Electrical Engineering College,Hunan University of Science and Technology,Xiangtan 411201,China;3.Department of Electrical and Information Engineering,Hunan Institute of Engineering,Xiangtan 411101,China)
Abstract:Flux observer based on closed loop extended-state-observer (CESO) and model reference adaptive system (MRAS) based estimation algorithms were proposed in the thesis,and used in the speed-sensorless vector controlled induction motors (IMs) system.A modified flux estimation model using CESO and integrated with flux compensate technology is introduced to reduce the uncertainty of the IMs model.Sensitivity of the sensorless drive against parameter and measurement errors is also qualitatively discussed.The speed identification algorithms is less sensitive to integration-related problems such as saturation and voltage drop at low speed,and its accuracy is independent the rotor resistance and torque variations as well.Simulations and experimental results proved the validity and practicability of the algorithm by comparing with classic MRAS method.
Keywords:induction motors; closed loop extended-state-observer; model reference adaptive system; rotor flux estimation; speed identification
中图分类号:TM 315
文献标志码:A
文章编号:1007-449X(2016)04-0057-07
DOI:10.15938/j.emc.2016.04.008
通讯作者:韦文祥
作者简介:韦文祥(1977—),男,博士研究生,研究方向为交流电机系统及其控制;刘国荣(1957—),男,教授,博士生导师,研究方向为不确定多变量系统的控制、交流电机系统及其控制。
基金项目:国家自然科学基金(51177040、51477047、51577057)
收稿日期:2014-11-09