高速铁路车辆系统动力响应指标域估计及线路状态反演方法
2016-05-16高建敏翟婉明
徐 磊, 高建敏, 翟婉明
(西南交通大学 牵引动力国家重点实验室,四川 成都 610031)
基于车辆系统与轨道结构的动力相互作用原理[1],轨道不平顺是轮轨接触中动力耦合的关键激振源之一,所以车辆-轨道系统的动力学行为与轨道不平顺密不可分。探明铁路基础结构与车辆系统在运营过程中的动态性能演变规律与机制[2],获得科学合理的基础结构服役状态及车辆系统部件动力响应指标的预测方法与控制准则,是实现铁路大系统基础结构及车辆系统高效维护、安全运行的较为关键的问题。
从理论上而言,轨道不平顺与车轨系统动力响应之间必然存在某种线性或非线性关系,国内外学者针对这一问题做了大量的研究。文献[3]利用计算机动力模拟仿真轨道不平顺激扰下客车和货车的动力响应,较早采用相干分析方法提取对车体振动不利的轨道不平顺波长;文献[4]推导了钢轨不平顺与车体加速度间的转移函数,利用时频分析方法希尔伯特-黄变换(Hilbert-Huang Transform,HHT),分析了钢轨不平顺与车体加速度之间的关系;文献[5]采用改进的经验模式分解(Empirical Mode Decomposition,EMD)方法自适应地将振动响应分解成本征函数,有效提取车辆-轨道耦合系统的动力学特性;文献[6]提出综合评价车辆/轨道系统动态特性的广义能量指标,并引入能量权系数表征不同波长成分对输入车辆/轨道系统总能量的权重;文献[7]结合轨道不平顺和车辆动态响应的特征量,提出高速铁路轨道平顺状态综合评价体系;文献[8]应用希尔伯特-黄变换对车辆-轨道系统中高低不平顺与车辆垂向振动加速度的关系进行分析,并利用车辆垂向振动加速度识别轨道高低不平顺的不良区段;文献[9]提出基于主成分分析-支持向量机(Principal Component Analysis-Support Vector Machine,PCA-SVM)方法的车体振动状态分类预测模型;文献[10]采用BP神经网络建立了轨道不平顺与车辆振动响应的关系;文献[11]利用实测数据,研究了车辆轴箱加速度与轨道高低不平顺的关系;文献[12]利用动力仿真计算模型,通过输入实测车辆振动加速度和轴箱加速度,对波长大于20m的轨道不平顺进行预测。
本文的研究主要以车辆-轨道垂向耦合动力学、支持向量机(SVM)理论及最小二乘拟合方法为基础,针对高速铁路板式轨道,建立相关的动力学计算模型,采用仿真计算方法获取不同轨道不平顺特征下的车辆系统动力响应时程,以车辆系统不同部件的动力响应指标域预估及线路基础结构损伤识别为目标,进行影响车辆系统动力响应的轨道不平顺控制指标优化提取、轨道不平顺指标-车辆系统垂向动力响应指标域估计模型构建及线路基础结构状态反演的研究。
1 车辆系统动力响应指标域估计模型
车辆系统动力响应指标域估计模型主要以不同轨道不平顺特征下车辆系统部件动力响应指标(绝对平均值、标准差、绝对最大值)的域估计为目的,建立轨道不平顺控制指标与车辆系统动力响应指标域等级的关联,实现对车辆系统动力响应指标所属域等级的快速估计。
车辆系统部件动力响应指标域估计模型构建流程见图1。
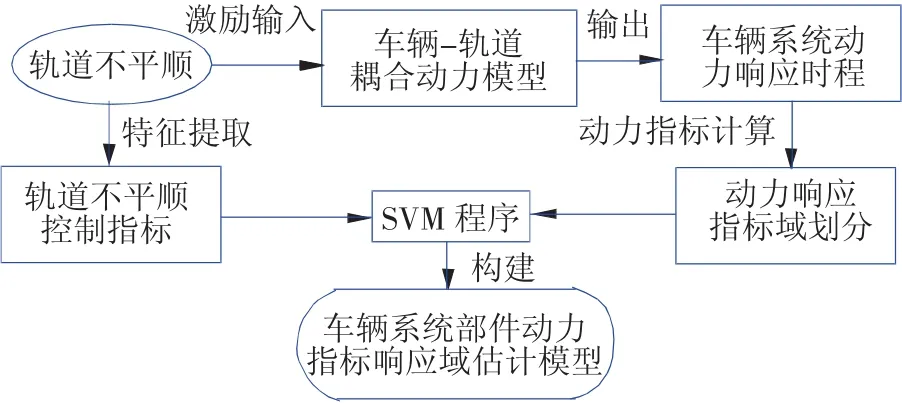
图1 车辆系统部件动力响应指标域估计模型构建流程
车辆系统部件动力响应指标域估计模型是在轨道不平顺控制指标提取、动力响应指标域划分的基础上,通过SVM理论建立两者之间的联系,从而构成车辆系统部件动力响应指标的域估计模型。下面将分别对SVM理论、轨道不平顺控制指标提取及动力响应指标域估计方法等内容进行介绍。
1.1 SVM 理论
SVM是一种监督学习模型,通常用来进行模式识别、分类及回归分析。SVM以结构风险最小化(Structure Risk Minimization,SRM)准则和有限样本统计学习理论(Statistical Learning Theory,SLT)为基础发展而成的一种机器学习方法[13]。在Rn空间中,向量分类预测问题的本质在于寻找通过学习样本诱导的函数,使得函数具有较好的泛化性,原理如下[14-15]。
设有样本集{(x1,y1),(x2,y2),…,(xn,yn)},其中xi∈Rn(i=1,…,n)表示输入模式,y∈{±1}表示目标输出。设最优平面为

式中:ξi为松弛变量,表示模式与理想线性情况的偏离程度;C为需指定的正参数(惩罚系数),表示SVM对错分样本的惩罚程度。
则权重向量ω和偏置b必须满足以下约束

SVM的目标是找到一个使训练数据平均错误分类误差最小的超平面,从而可推导出优化问题。根据拉格朗日乘子法,最优分类超平面的求解可转化为以下的约束优化问题
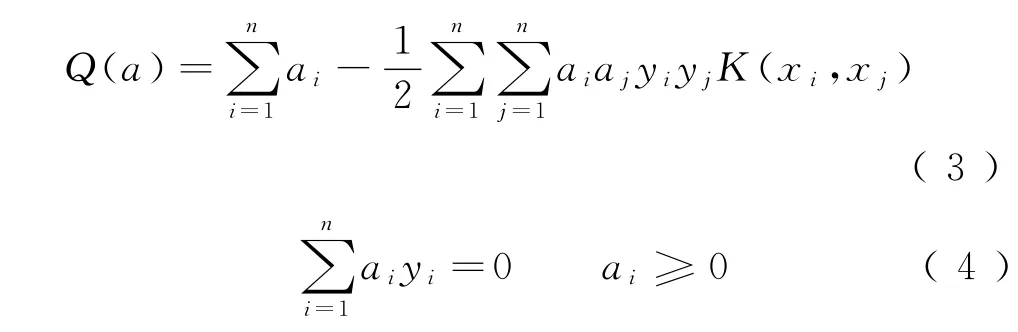
式中:Q(a)为目标函数;K(xi,xj)为满足 Mercer定理的核函数;{ai}n为拉格朗日乘子,其中大部分的ai为0,而不等于0的ai所对应的样本即称为支持向量,可将其作为动力响应指标域的最优分类面,见图2。

图2 SVM最优分类面
在图2中,红、蓝点即为不同动力指标域下的轨道不平顺控制指标分布,而红、蓝直线作为域界线将不同所属域的控制指标分开。
1.2 用于域估计的轨道不平顺指标
合理选取轨道不平顺指标是车辆系统动力响应指标域估计模型中较为关键的因素,也是域估计模型较难处理的问题之一。如果选择不合理将无法正确分类动力指标的不同响应域,造成较为严重的响应域混叠问题。文献[9]采用区段轨道不平顺的时频统计指标进行车体振动响应指标的预测,本文借鉴这一方法。常用的轨道不平顺时-频统计指标见表1。

表1 轨道不平顺时-频统计指标
由表1可知,轨道区段不平顺的时-频统计指标总计275个(即每个区段不平顺样本需要计算275个统计指标)。这些指标一般存在冗余,可采用相关系数[16]获取对车辆动力响应最敏感的轨道不平顺控制指标。控制指标与动力响应指标之间的相关系数越大,表示两者的激励输入-动力输出关系越明显。20 166个样本下,前构架垂向振动加速度绝对平均值与轨道不平顺时-频统计指标的相关系数分布曲线见图3。

图3 前构架垂向振动加速度绝对平均值与轨道不平顺时-频统计指标的相关系数分布曲线
由图3可知,第28、45号统计指标与绝对平均值指标之间的相关系数最大,分别为0.569 7和0.559 3,可取为较优的2个控制指标。第28、45号统计指标为小波包第9、26阶子频带能量,其计算方法可参考文献[17]。
1.3 动力响应指标的域估计方法
1.3.1 车辆系统部件动力响应指标的概率分布
对车辆系统动力响应指标进行概率分布拟合,得出其概率分布类型,为不同指标区域的阈值制定奠定基础。通过对20 166个样本动力指标的概率分布计算与拟合,得到车辆系统不同部件振动加速度指标的概率分布拟合曲线,见图4。采用 K-S(Kolmogorov-Smirnov)分布检验方法[18],可知车辆系统部件的垂向振动加速度的指标概率分布基本服从广义极值分布。
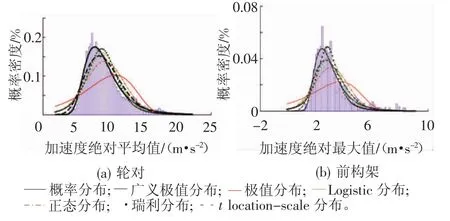
图4 车辆系统不同部件振动加速度指标的概率分布拟合曲线
1.3.2 动力响应指标的域划分
为满足识别精度,本文将车辆系统部件的振动加速度指标划分为9个等级,每3个等级组成1个动力响应指标域,分别为整修域、恶化域及保养域,以累积概率70%、30%为临界点,域等级由低级到高级。前构架垂向加速度的绝对平均值指标域分布曲线见图5。
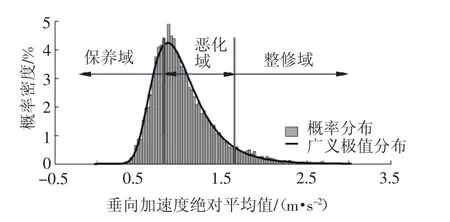
图5 前构架垂向加速度绝对平均值指标域分布曲线
1.3.3 动力响应指标的域界线估计方法
采用SVM方法计算动力响应指标域最优分类面,提取不同指标域之间的分界线坐标,采用解析函数进行最小二乘法拟合,获取车辆系统动力响应指标的域界线。前构架加速度不同绝对平均值指标域对应的轨道不平顺控制指标分布见图6。

图6 前构架加速度不同绝对平均值指标域对应的轨道不平顺控制指标分布
1级整修域作为车辆系统部件振动响应指标最大的区域,其对应的线路几何状态也是最差的。由图6(a)可知,1级整修域对应的轨道不平顺控制指标分布极广,在其它响应域中都有一定的分布。由图6(b)可知,线路几何状态较好的区域(1级保养域)与较差区域(1级整修域)相比,其控制指标聚集在较小的范围内,且与整修域分类良好,说明这2个控制指标起到了一定的域分类作用。
本文用SVM进行动力响应指标域分类以获取最佳分类面(即域界线)时,采用多层2分类方法,根据不同的动力响应域对轨道不平顺联合指标进行标记,取线路状态较差的动力响应指标域(低等级域)为“+1”,对应的其余域为“-1”。由图6(a)可知,整修域与其余域的控制指标混叠十分严重,在不同动力响应域的输入控制指标没有明显类别界线时,极难采用SVM算法实现不同类样本的自动识别。文献[8]提出一种危险点分布比率的方法,根据此法,本文对控制指标的二维分布进行网格划分,计算每个网格中低等级域点数Nr占网格中总点数N 的比率,用Pr表示,可称为域概率水平值,计算式为

Pr代表控制指标落入此区域时,其对应的车辆系统部件动力响应指标处在此响应域的概率。若Pt为阈值,当Pr>Pt时,此网格内的控制指标全部处在低等级域(如整修域),标记为“+1”;当Pr≤Pt时,此网格内的散点全部为低等级域对应的其余联合域(如恶化-保养域),标记为“-1”。根据对线路几何状态要求的高低设定相应的Pt值,本文设定Pt=0.7(即当Pr>0.7时,此区域内的控制指标至少有70%以上的概率使其对应的动力响应指标处于此域)。1级整修域与2级整修域-3级保养域的轨道不平顺控制指标分布见图7。
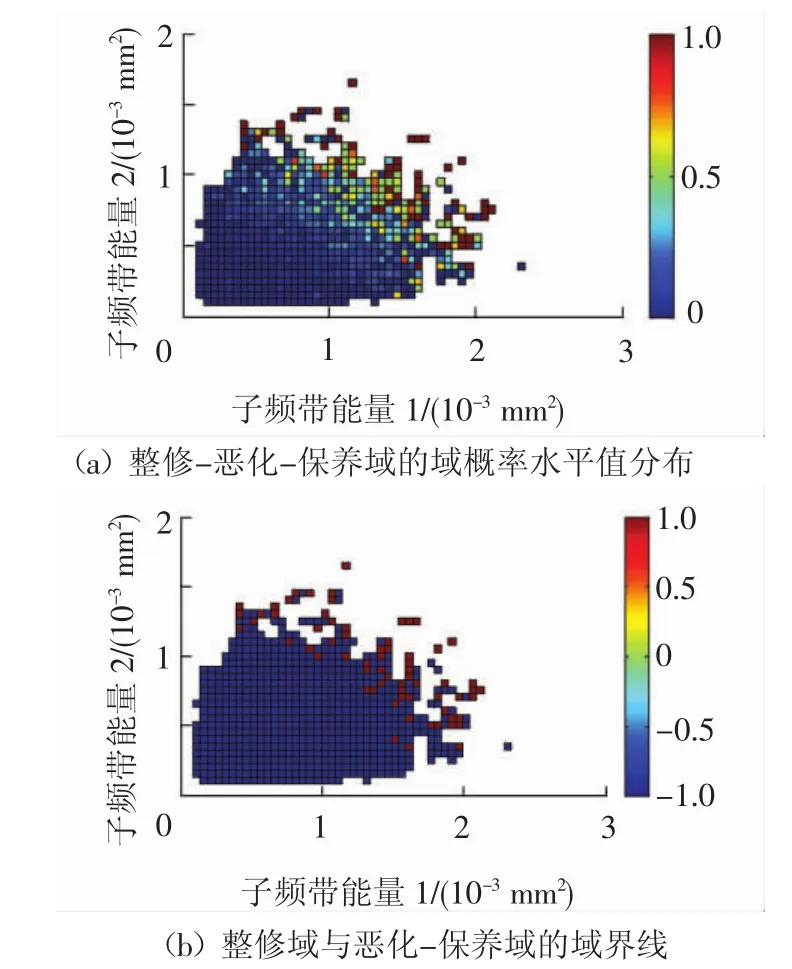
图7 1级整修域与2级整修域-3级保养域的轨道不平顺控制指标分布
由图7可知,整修域对应的轨道不平顺控制指标基本处于2个子频带能量均较大的位置,特别是经过概率阈值处理后(图7(b)),1级整修域与其余联合域的分类更加明显,降低了分类识别的难度。
采用SVM方法计算动力响应指标域之间的最优分类面,提取不同指标域之间的分界线坐标,并进行二次函数拟合,获得的车辆系统前构架加速度绝对平均值指标1级整修域及与其对应的其余联合域(2级整修域-3级保养域)的域界线。1级整修域与其余联合域的域界线见图8。
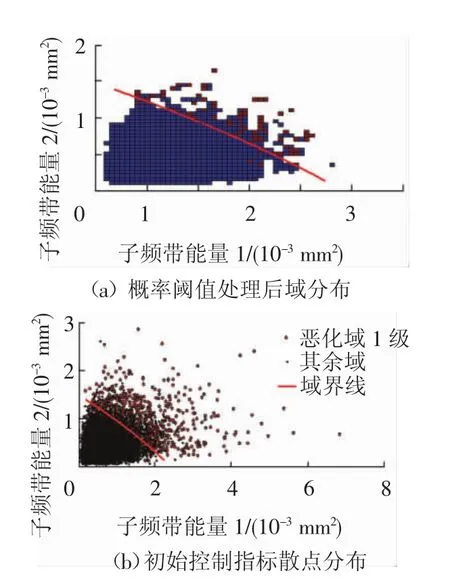
图8 1级整修域与其余联合域的域界线
1.4 动力响应指标域界线估计
按照1.3节所述的方法,以10m为1个动力响应指标和轨道不平顺控制指标计算区段,对前构架振动加速度样本进行动力响应指标域界线估计,前构架加速度指标域界线见图9。
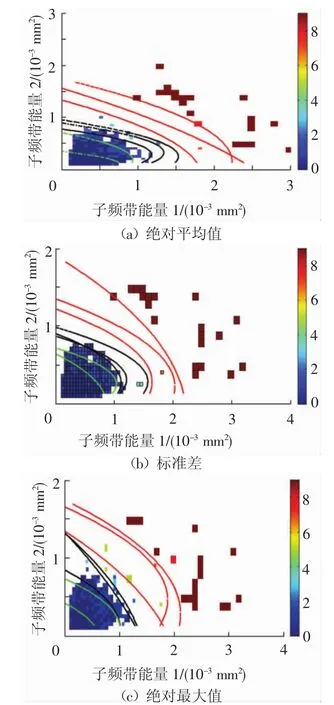
图9 前构架加速度指标域界线
各域界线可以用一个简单的二次多项式表示为

式中:Y为子频带能量1;x为子频带能量2;A、B、C为多项式系数。
域界限拟合参数见表2。

表2 域界线拟合参数
为表明动力响应域界线的合理性,从不同动力响应域界线中随机选取300个样本,根据其对应的轨道不平顺控制指标,计算其对应的动力响应域,其识别准确率见表3。
由表3可知:1级整修域的识别准确率在90%以上,这是由于此区域的轨道不平顺控制指标幅值较大;其余响应域对应的轨道不平顺指标极少达到界线1以上的范围,因此1级整修域作为线路几何状态最差的区域,其识别准确率也是最高的;其余动力响应域的识别准确率基本能达到80%左右;部分指标域的识别效果较差(如2级恶化域)。

表3 不同动力响应指标域识别的准确率 %
2 基于动力响应指标域估计的线路状态反演方法
2.1 基本原理
将影响车辆-轨道系统耦合作用的因素分为轨道不平顺及其他综合因素,那么当轨道不平顺统计特征不变,而其他综合因素变化(如轨道基础结构或车辆系统部件出现伤损)时,依据此模型获得的动力响应域与实际动力响应域应该存在一定的不同,随之产生指标域等级的跃变(如从保养域跃变至整修域)。此不同可理解为铁路系统基础部件的服役性能出现了异常,否则实测域与仿真域应基本一致或相差不多。
定义“域跃变阶数”Sorder为轨道不平顺控制指标输入下动力响应域估计模型输出的动力响应指标域等级M 与实测动力响应指标域等级Y的绝对差值,其计算式为

式中:i为不同的不平顺类型,1~7分别为左高低、右高低、左轨向、右轨向、扭曲、水平及轨距不平顺;Ci表示不同不平顺类型对车体振动影响的权系数;M,Y取值均在1~9,依次表示保养域、恶化域及整修域等动力响应域的9个细化等级。
由于本文仅计算了车辆-轨道系统的垂向振动,可取Sorder=|M-Y|。可以采用Sorder指标评定实际线路状态与仿真理想状态之差异,Sorder值越大,表示此路段越有可能出现了异常。
2.2 轨道基础结构损伤识别
采用扣件脱空这一线路基础结构损伤工况,利用动力学仿真模型计算扣件损伤前后的车辆系统动力响应差异。扣件脱空模拟为钢轨与轨道板脱空,即扣件刚度、阻尼均变为0。依据构架振动加速度动力响应指标的Sorder值反演扣件脱空情况。每隔15m左右,在轨道板中部设置了1个扣件脱空点,扣件脱空前后的前构架振动加速度及其差值见图10。

图10 扣件脱空前后的前构架振动加速度及其差值
提取60个扣件脱空下的轨道不平顺控制指标及其对应的动力响应指标域,从第20个样本开始,每隔10个样本,将其均匀分布于600个样本之中。将这660个样本的轨道不平顺控制指标输入构架动力响应指标域估计模型之中,计算不同动力响应指标的Sorder值。经统计,针对绝对平均值、标准差及绝对最大值这3个动力响应指标:600个正常服役样本的Sorder值中分别有71.17%、73.33%、70.83%的样本Sorder=0;60个扣件脱空样本中分别有75.10%、81.63%、85.12%的样本Sorder>3。因此,采用基于动力响应指标域估计的线路状态反演方法具有一定的线路基础状态识别作用。
3 结论
(1)利用相关系数法,采用了2个子频带能量指标作为车辆系统动力响应的控制指标,制定了较为简洁的动力响应指标域界线。从不同动力响应指标域识别的准确率看,该方法基本可行。
(2)采用单一变量法的基本原理,将影响车辆-轨道系统耦合作用的因素分为轨道不平顺及其他综合因素(包括环境、材料性能等)2类,因而能在一定程度上判断车辆-轨道系统是否出现异常及轨道系统在何处出现了异常。
(3)本文仅对扣件脱空这一工况进行了仿真伤识。在具体的工程应用时,只需将构架振动加速度与对应的轨道不平顺实测值带入域估计模型,并计算“域跃变阶数”,即可对线路基础状态进行相应的识别。
参考文献:
[1]翟婉明.车辆-轨道耦合动力学[M].北京:科学出版社,2014.
[2]翟婉明,赵春发,夏禾,等.高速铁路基础结构动态性能演变及服役安全的基础科学问题[J].中国科学:技术科学,2014,44(7):645-660.ZHAI Wanming,ZHAO Chunfa,XIA He,et al.Basic Scientific Issues on Dynamic Performance Evolution of the High-speed Railway Infrastructure and Its Service Safety[J].Science China Technological Sciences,2014,44(7):645-660.
[3]练松良,黄俊飞.客货共运线路轨道不平顺不利波长的分析研究[J].铁道学报,2004,26(2):111-115.LIAN Songliang,HUANG Junfei.Study of the Detrimental Wavelengths of Track Irregularities for Railways with Passenger and Freight Traffic[J].Journal of the China Railway Society,2004,26(2):111-115.
[4]李海涛,王成国,许跃生,等.基于EEMD的轨道-车辆系统垂向动力学的时频分析[J].中国铁道科学,2007,28(5):24-30.LI Haitao,WANG Chengguo,XU Yuesheng,et al.Timefrequency Response Analysis of the Vertical Dynamics of Track-vehicle Systems Based on EEMD[J].China Railway Science,2007,28(5):24-30.
[5]陈双喜,林建辉,陈建政.基于改进的EMD方法提取车辆-轨道垂向耦合系统动态特性[J].振动与冲击,2011,30(8):212-216.CHEN Shuangxi,LIN Jianhui,CHEN Jianzheng.Dynamic Characteristics Extraction of Vehicle-track Vertically Coupling System Based on Improved EMD[J].Journal of Vibration and Shock,2011,30(8):212-216.
[6]王卫东,刘金朝,梁志明.综合评价车辆/轨道系统动态特性的广义能量法[J].中国铁道科学,2009,30(5):22-27.WANG Weidong,LIU Jinzhao,LIANG Zhiming.Generalized Energy Index for Comprehensively Evaluating the Dynamic Characteristics of Vehicle/Track System[J].China Railway Science,2009,30(5):22-27.
[7]康雄,王卫东,刘金朝.基于RAMS的高速铁路轨道平顺状态综合评价体系研究[J].中国铁道科学,2013,34(2):13-17.KANG Xiong,WANG Weidong,LIU Jinzhao.Research on Comprehensive Evaluation System for Track Irregularity of High-speed Railway Based on RAMS[J].China Railway Science,2013,34(2):13-17.
[8]李再帏,练松良,刘晓舟.HHT在车辆-轨道系统垂向振动时频分析中的应用[J].振动、测试与诊断,2013,33(5):799-803.LI Zaiwei,LIAN Songliang,LIU Xiaozhou.The Application of HHT on Vehicle-track Vertical Time-frequeny A-nalysis[J].Journal of Vibration,Measurement & Diagnosis,2013,33(5):799-803.
[9]徐磊,陈宪麦.轨道不平顺作用下铁路列车车体振动状态的PCA-SVM 预测分析[J].铁道学报,2014,36(7):112-120.XU Lei,CHEN Xianmai.PCA-SVM Forecast of Car-body Vibration States of Railway Locomotives and Vehicles under the Action of Track Irregularity[J].Journal of the China Railway Society,2014,36(7):112-120.
[10]LI D,MEDDAH A,HASS K,et al.Relating Track Geometry to Vehicle Performance Using Neural Network Approach[J].Journal of Rail and Rapid Transit,2006,220(3):273-281.
[11]WESTON P F,LING C S,ROBERTS C,et al.Monitoring Vertical Track Irregularity from In-service Railway Vehicles[J].Journal of Rail and Rapid Transit,2007,221(1):75-88.
[12]ALFI S,BRUNI S.Estimation of Long Wavelength Track Irregularities from on Board Measurement [C]//The 4thIET International Conference on Railway Condition Monitoring.Derby:Petr Kroca,2008:16-22.
[13]VAPNIK V N.The Nature of Statistical Learning Theory[M].New York:Springer-Verlag,1999.
[14]TAYLOR J S,CRISTIANINI N.Kernel Methods for Pattern Analysis[M].Cambridge:Cambridge University Press,2004:45-47.
[15]杨淑莹.模式预测与智能计算-Matlab技术[M].北京:电子工业出版社,2008:135.
[16]王灵芝,徐宇工,张家栋.铁路设备关键零部件的可靠性分析模型及其应用研究[J].铁道学报,2008,30(4):123-130.WANG Lingzhi,XU Yugong,ZHANG Jiadong.Research on Reliability Analysis Model for Key Components and Parts of Railway Equipment and Its Application[J].Journal of the China Railway Science,2008,30(4):123-130.
[17]王奉涛,马孝江,邹岩坤,等.基于小波包分解的频带局部能量特征提取方法[J].农业机械学报,2004,35(5):177-180.WANG Fengtao,MA Xiaojiang,ZOU Yankun,et al.Local Power Feature Extraction Method of Frequency Bands Based on Wavelet Packet Decompostion[J].Transactions of the Chinese Society for Agricultural Machinery,2004,35(5):177-180.
[18]陈子燊,刘曾美,路剑飞.广义极值分布参数估计方法的对比分析[J].中山大学学报(自然科学版),2010,49(6):105-109.CHEN Zishen,LIU Zengmei,LU Jianfei.Comparative Analysis of Parameter Estimation Methods of Generalized Extreme Value Distribution[J].Acta Scientiarum Naturaling Universitatis Sunyatseni,2010,49(6):105-109.
