基于双STF-UKF算法的永磁同步电机参数联合估计
2016-05-09吕帅帅
林 辉 吕帅帅
(西北工业大学自动化学院,西安 710129)
基于双STF-UKF算法的永磁同步电机参数联合估计
林辉吕帅帅
(西北工业大学自动化学院,西安710129)
摘要:针对永磁同步电机参数辨识问题,分析了永磁同步电机的可辨识模型.将参数看成缓慢的变化状态,同时考虑系统噪声和测量噪声,提出了一种基于强跟踪滤波器的无迹卡尔曼滤波算法.该算法能够同时辨识定子电阻、直轴和交轴电感、永磁体磁链,讨论分析了该算法的稳定性.为了减少算法的计算量,将4个参数分成2部分,采用2个STF-UKF滤波器交替运行辨识全部参数.仿真结果表明,该算法在PMSM不同的工况下能够有效地辨识电机的全部参数.
关键词:永磁同步电机;参数辨识;强跟踪滤波器;无迹卡尔曼滤波;稳定性
引用本文:林辉,吕帅帅.基于双STF-UKF算法的永磁同步电机参数联合估计[J].东南大学学报(自然科学版),2016,46(1) : 49-54.DOI: 10.3969/j.issn.1001-0505.2016.01.009.
随着永磁同步电机(permanent magnet synchronous motor,PMSM)高性能伺服应用的发展,PMSM的参数辨识一直是各国学者的研究热点[1-2].电机参数的精度在高性能伺服控制中有着重要的作用,如矢量控制中的最大转矩电流比控制、直接转矩控制中磁链和转矩的估计、无位置控制等[3-4]都需要已知精确的电机参数.但在实际应用中,电机参数会随着环境温度、磁场饱和程度等因素的改变而改变[5].因此,参数辨识具有实际意义.
永磁同步电机参数辨识主要分为离线辨识和在线辨识.常用的离线辨识方法有空载实验和堵转实验、单相注入交流和直流电流测量、神经网络、遗传算法、蚁群算法等方法[6];在线辨识方法主要有递推最小二乘算法(recursive least square algorithm,RLS)[7]、模型参考自适应算法[7]、扩展卡尔曼滤波算法[4]等.RLS算法以测量和估计值得到的均方差作为性能指标,参数估计精度受测量噪声的影响较大[8];模型参考自适应算法以李雅普诺夫理论或波波夫超稳定理论保证辨识系统的稳定性,同样也受系统测量噪声的影响,辨识精度不够理想;神经网络算法、遗传算法以及蚁群算法一般需要大量的数据进行训练和寻优,但这种无模型参数辨识的设计缺少理论支持;扩展卡尔曼滤波(extended Kalman filter,EKF)是卡尔曼滤波在非线性系统中的推广.文献[4]采用EKF对PMSM的直轴和交轴电感进行辨识,辨识精度较高,动态性能较好,但EKF引入线性化误差,对于非线性强度较高的系统容易导致滤波效果的下降[9].为了克服EKF不足,Julier等[10]提出一种非线性滤波方法,即无迹卡尔曼滤波(unscented Kalman filter,UKF),使用采样方法近似非线性分布来解决非线性滤波问题.该方法无需计算Jacobi矩阵,避免了EKF局部线性化而造成的滤波器不稳定.但是,当被辨识的模型存在不确定因素时,无论是UKF还是EKF都使得参数估计精度下降,甚至可能导致滤波器发散[11].
针对扩展卡尔曼滤波器存在的缺点,周东华等[12]提出了一种多重次优渐消因子的EKF,即强跟踪滤波器(strong tracking filter,STF),当模型参数与过程参数存在较大差异时,SKF对过程参数变动具有较大的鲁棒性.本文基于文献[13]的思想,将STF与UKF相结合,改善UKF算法对参数摄动的鲁棒性,并应用于PMSM参数辨识中.将PMSM的参数看成是一个关于时间缓慢变化的状态,因此可以将参数辨识问题看成是一个含有白噪声非线性系统的估计问题.将PMSM的4个参数分成2组,采用2个基于强跟踪滤波器的无迹卡尔曼滤波器(STF-UKF)分别进行参数辨识,2个STF-UKF进行数据交换,交替运行,进而减少辨识算法和过程中的计算量,便于工程实现.
1 永磁同步电机参数辨识模型
假设在辨识过程中PMSM三相电流、位置、转速和相电压等信息能够通过相应的传感器得到,将PMSM的定子电阻、直轴和交轴电感及转子磁链看成是关于时间的慢变参数,通过欧拉离散法,则可以得到PMSM在dq坐标系下的离散可辨识模型,即

其中非线性离散函数和状态分别为

x(k) = { id(k),iq(k),Rs(k + 1),ψf(k),Ld(k),Lq(k) }T,输入为u(k) = { ud(k),uq(k) }T,w(k) ∈N(0,Q)和v(k)∈N(0,R)分别为互不相关的系统噪声和测量噪声,ud(k),uq(k),id(k),iq(k)分别为直轴、交轴的电压、电流; Rs(k),ψf(k),Ld(k),Lq(k)为待辨识的定子电阻、转子磁链、直轴和交轴电感.
常规的参数估计算法是将系统的状态和待估计参数联合作为一个扩张状态系统,如系统(1)所示,但随着待辨识参数数量的增加,系统维数增加导致计算量呈指数增长[14].双STF-UKF算法思想是将系统的状态和待辨识参数分成2组,即x1(k) = { id(k),iq(k),Rs(k),ψf(k) }T,x2(k) = { id(k),iq(k),Ld(k),Lq(k) }T分别进行辨识,则待辨识系统可以分为2个子系统Σ1和Σ2,即

2个子系统的输出与原系统输出一致,w1(k),w2(k),v1(k),v2(k)为原系统w(k),v(k)的相关量;对应的协方差阵分别为Q1,Q2,R1,R2; f1(·)和f2(·)为子系统的非线性离线函数.
2 双STF-UKF算法
对于复杂和参数摄动系统,STF具有较强的跟踪能力和鲁棒性,因此,基于STF的UKF算法比传统UKF估计精度好,对初始误差和过程误差的调节能力具有更好的快速性和鲁棒性.由文献[15]可知,对于UKF算法,当状态预测值与测量值误差增大时,应调整滤波器增益进而提高估计精度.而STF-UKF算法能够充分利用残差序列中的有效信息,提高参数估计精度[13].对于系统(2)和(3),采用双STF-UKF算法相互交替工作,其工作原理与单个STF-UTF原理一致.STF-UKF算法步骤如下.
①取系统初始状态和初始协方差阵,即
并选择适当的Q1,R1.
②计算Sigma点.n维状态需求取L = 2n + 1 个Sigma点,对于式(2)中的系统状态χ1,有
各个Sigma点对应的权重系数为
式中,ε为尺度参数,调整ε可以提高逼近精度以及Sigma点的分布.
③状态预测.根据系统(2)及式(6)得到Sigma点的预测值为

则系统状态的预测值为

系统Σ1输出测量值的预测值为

④计算渐消因子矩阵.由系统的实际输出值与估计值得到残差矢量为

则残差阵V(k +1)表示为

式中,ρ1为遗忘因子.M1(k +1)和N1(k +1)为辅助矩阵,其计算表达式分别为


式中,F1(k)为系统Σ1的雅克比矩阵,F1(k) =;η为选定的弱化因子常数,当η≥1时状态估计值更加平滑.
由M1(k +1)和N1(k +1)可得到渐消因子矢量为

其取值为

则渐消因子矩阵为

⑤计算预测协方差阵和交叉协方差阵.根据渐消因子矩阵、Sigma点、估计值以及输出值计算得到预测值的协方差阵为
⑥测量更新.滤波器增益为

则状态的最优估计值为
协方差阵更新为

当Σ1的估计结束后,接着对Σ2进行估计,此时,将Σ1估计出的Rs(k)和ψf(k)用于Σ2的估计中.对Σ2的估计方法与Σ1相同,通过估计得到dq轴的电感值.系统Σ1和Σ2交替运行,在减小计算量和CPU消耗的同时,精确估计电机参数[14].
3 STF-UKF稳定性分析
根据STF算法定义,STF具有强跟踪滤波性时必须满足正交性原理,即
式(24)和(25)的证明见文献[15].针对Σ这一类非线性随机系统,为了便于分析UKF算法的稳定性,此处不再区分系统Σ1和Σ2,将状态x1和x2统称为x,定义状态估计误差和预测误差分别为

将系统状态函数f(x)在^x(k)泰勒展开处取一阶项,为弥补残差和舍弃高阶项带来的误差,引入误差补偿矩阵β(k) = diag(β1(k),β2(k),…,βn(k) ).则状态估计值为

引理1考虑到非线性随机系统(如Σ),以及UKF算法(即式(4)~(23) )中不考虑渐消因子矩阵Γ1(k +1)或Γ1(k +1)≡1时,若同时满足以下条件[15]:
1)存在不为零的实数fmax,fmin,hmax,hmin,βmax,βmin,pmin,有

2)存在大于零的实数qmax,^qmax,^qmin,rmax,^rmax,^rmin,pmax,有

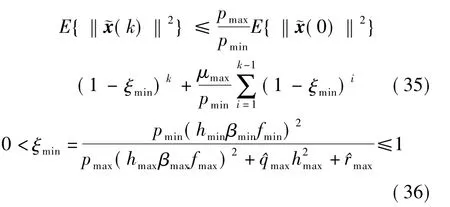
由式(35)、(36)可知,当k→∞时,UKF的估计误差的均方值上界为

从UKF的递推公式可以看出,其增益矩阵KU(k +1)是协方差阵和估计误差+1)的函数[16],即

同理,STF-UKF的增益矩阵KS(k +1)是P(k、估计误差以及渐消因子λ(k + 1)的函数,即

从式(38)和(39)可以看出,当状态突变时,将导致残差γ1(k + 1)突然增大,引起渐消因子λ(k +1)增大,进而引起增益矩阵KS(k +1)中元素的增大.因此,与UKF相比,Γ1(k +1)能使STF-UKF具有自适应的调节能力,保证了对突变状态具有更快的收敛能力.对于局部可观测系统Σ,对引理1中的条件容易满足,通过调整噪声矩阵和渐消因子能够保证收敛误差在均方内有界[16].
4 仿真结果分析
为验证双STF-UKF算法估计的性能,通过图1的PMSM直接转矩控制系统对其进行仿真验证,并与UKF算法在估计精度和跟踪速度方面进行比较.
仿真采用的永磁同步电机参数为Rs= 1.73Ω,Ld= Lq=7 mH,永磁体磁链ψf=0.07 Wb,极对数p =5,直流母线电压为Udc=400 V,仿真时在电流测量端加入方差为0.05的白噪声.由于状态误差协方差阵的初值对系统的收敛性没有影响,仅影响收敛速度; Qi和Ri(i =1,2)根据状态和测量噪声的统计特性获得,由于实际系统中不一定能够得到噪声和统计特性,故通过调试和试验后得到的参数为
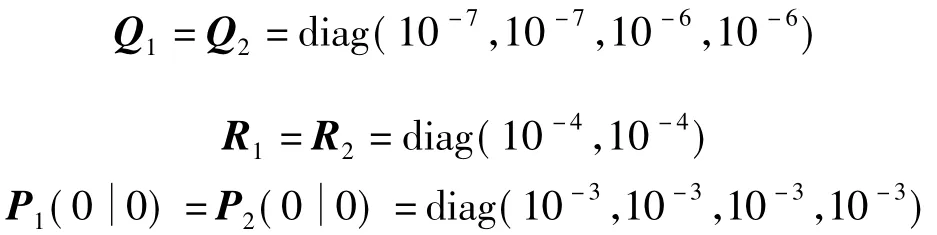
遗忘因子ρ1=ρ2=0.95,尺度参数λ=1.5.
图1为电机运行的工况.图中,Te为电磁转性,TL为负载转矩.在0~0.5 s时,速度指令由0增加到1 200 r/min,负载为2 N·m; 0.5~1.0 s速度为1 200 r/min,负载为4.7 N·m; 1.0~1.5 s速度为从1 200 r/min减速到0,负载为2 N·m.以下仿真都是基于这种工况.
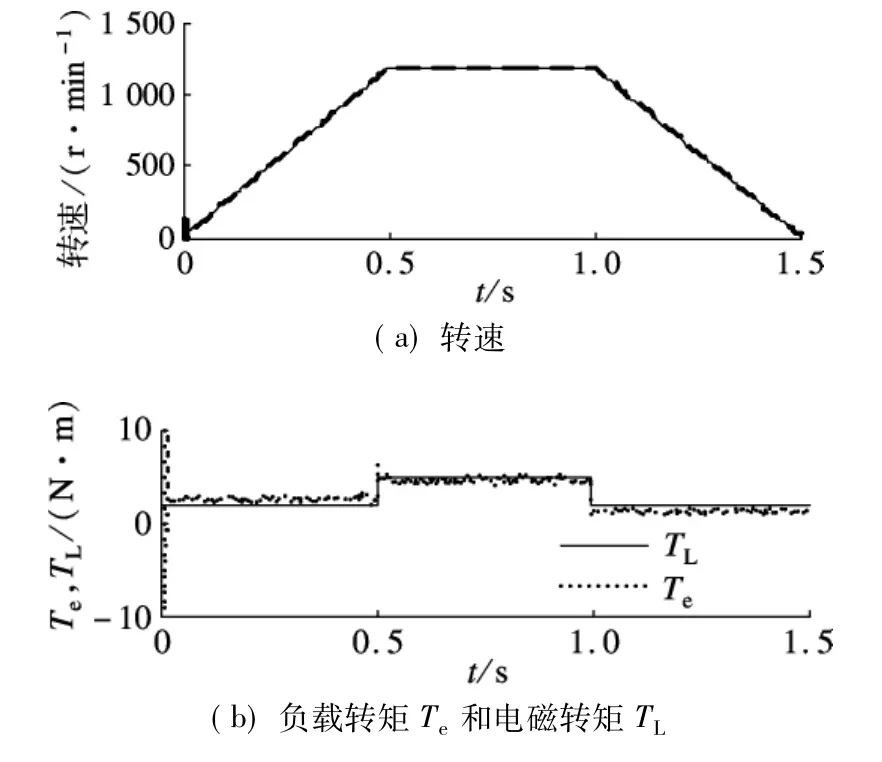
图1 永磁同步电机运行工况
图2和图3分别对应初值为0.5倍和2倍真实值时的辨识结果.为了与UKF算法进行对比,在同等条件下对UKF进行仿真.由结果可以看出,STF-UKF的收敛速度明显比UKF快,STF-UKF算法在0.06 s时已基本收敛到真值,而UKF算法在0.13 s时才收敛到真值,通过计算得到STF-UKF的辨识精度在5%以内,而UKF的辨识精度只有12%.由此可以看出,本文提出的双STF-UKF算法优于传统UKF算法,动态性能好,稳态精度高.
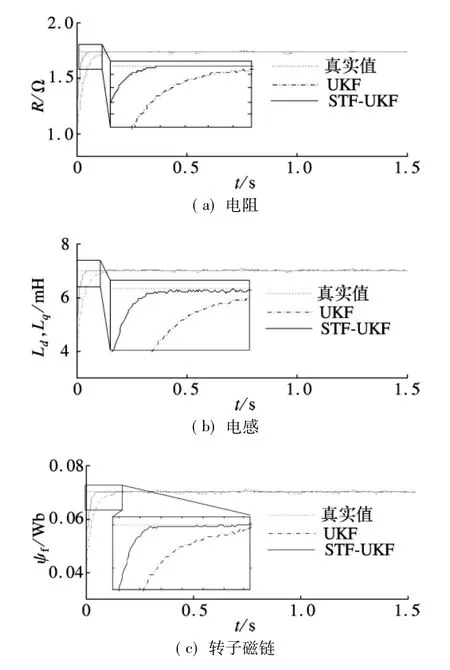
图2 初始值为0.5倍真实值时的辨识结果
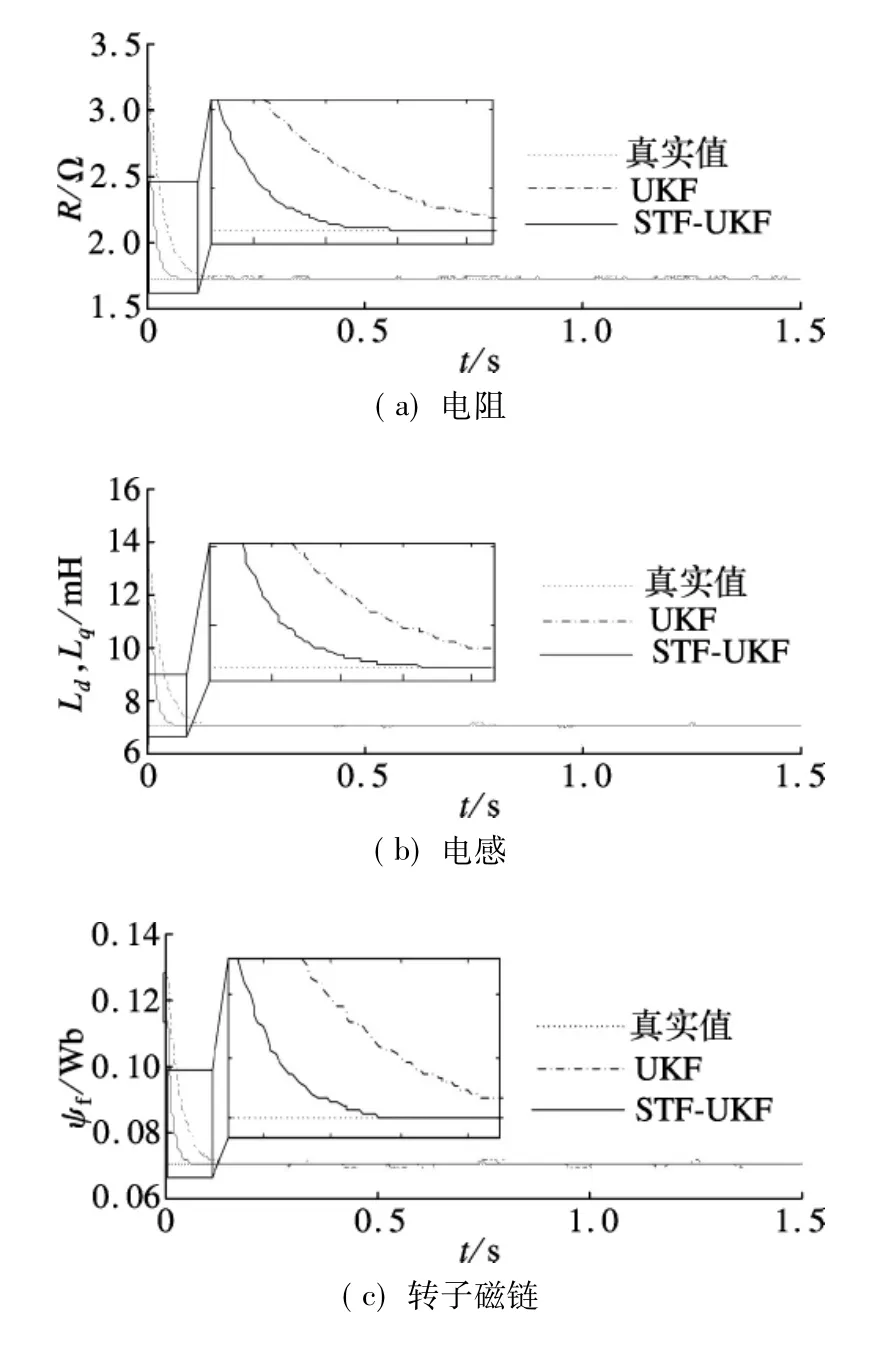
图3 初始值为2倍真实值时的辨识结果
实际PMSM电机参数会随着运行环境(如温度、电机磁场饱和程度等)的改变而发生变化,为模拟参数变化过程,在仿真时从0.5 s开始电阻和电感缓慢上升,磁链缓慢下降,电阻和电感的变化幅值为初始值的30%,电感变化幅值为初始值的20%,在1 s时,参数不再变化.图4为STF-UKF和UKF的辨识结果,由图可以看出,STF-UKF辨识的动态性能优于UKF算法,UKF算法收敛速度较慢,因此,基于STF-UKF算法能够准确地辨识PMSM的参数,辨识精度高,收敛时间短.
5 结语
本文针对电机的可辨识动态模型,结合强跟踪滤波器和无迹卡尔曼滤波器的优点,提出基于强跟踪滤波器的无迹卡尔曼的滤波辨识算法.为了降低该算法的计算量,在此模型的基础上构造了双STF-UKF的实施策略,进行了稳定性分析.该算法能够降低系统的阶次,有效减少计算量.仿真结果验证了在不同工况下,双STF-UKF算法能够快速、准确地收敛到真值,稳态精度满足要求.与UKF相比,双STF-UKF动态响应快,可应用于在线辨识和高性能算法中.
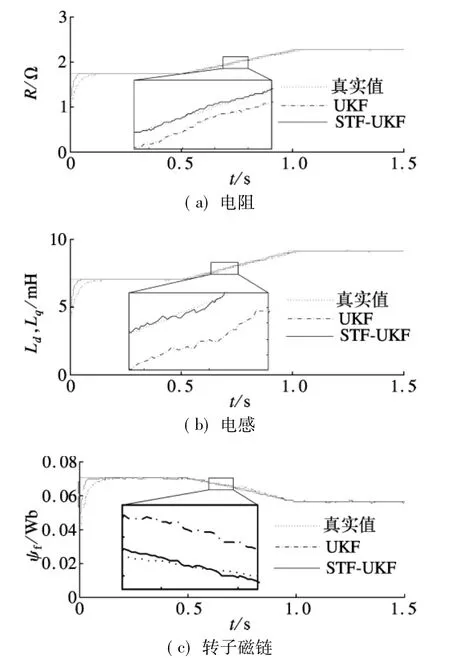
图4 参数变化时UKF与STF-UKF的辨识结果
参考文献(References)
[1]Ha I J,Lee S H.An online identification method for both stator-and rotor resistances of induction motors without rotational transducers[J].IEEE Transactions on Industrial Electronics,2000,47(4) : 842-853.
[2]Underwood S J,Husain I.Online parameter estimation and adaptive control of permanent-magnet synchronous machines[J].IEEE Transactions on Industrial Electronics,2010,57(7) : 2435-2443.
[3]Inoue Y,Kawaguchi Y,Morimoto S,et al.Performance improvement of sensorless IPMSM drives in a lowspeed region using online parameter identification[J].IEEE Transactions on Industry Applications,2011,47 (2) : 798-804.
[4]Sim H W,Lee J S,Lee K B.On-line Parameter Estimation of Interior Permanent Magnet Synchronous Motor using an Extended Kalman Filter[J].Journal of Electrical Engineering&Technology,2014,9(2) : 600 -608.
[5]Liu K,Zhang Q,Chen J,et al.Online multiparameter estimation of nonsalient-pole PM synchronous machines with temperature variation tracking[J].IEEE Transactions on Industrial Electronics,2011,58(5) : 1776-1788.
[6]陈振锋,钟彦儒,李洁.感应电机参数辨识三种智能算法的比较[J].电机与控制学报,2010,14(11) : 7-12.DOI: 10.3969/j.issn.1007-449X.2010.11.002.Chen Zhenfeng,Zhong Yanru,Li Jie.Comparison of three intelligent optimization algorithms for parameter identification of induction motors[J].Electric Machines &Control,2010,14(11) : 7-12.DOI: 10.3969/j.issn.1007-449X.2010.11.002.(in Chinese)
[7]徐占国,邵诚,冯冬菊.基于模型参考自适应的感应电机励磁互感在线辨识新方法[J].中国电机工程学报,2010,30(3) : 71-76.Xu Zhanguo,Shao Cheng,Feng Dongju.On-line identification of induction motor mutual inductance based on model reference adaptive system[J].Proceedings of the CSEE,2010,30(3) : 71-76.(in Chinese)
[8]东子昭.异步电机参数辨识与自适应控制策略研究[D].北京:北方工业大学电气与控制工程学院,2014.
[9]陆可.感应电机状态估计和参数辨识若干新方法研究[D].成都:西南交通大学电气工程学院,2008.
[10]Julier S J,Uhlmann J K.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE,2004,92(3) : 401-422.
[11]Jafarzadeh S,Lascu C,Fadali M S.Square root unscented Kalman filters for state estimation of induction motor drives[J].IEEE Transactions on Industry Applications,2013,49(1) : 92-99.
[12]周东华,席裕庚,张钟俊.非线性系统带次优渐消因子的扩展卡尔曼滤波[J].控制与决策,1990,5 (5) : 1-6.Zhou Donghua,Xi Yugeng,Zhang Zhongjun.Suboptimal fading extended Kalman filtering for nonlinear systems[J].Control&Decision,1990,5(5) : 1-6.(in Chinese)
[13]Li Z,Pan P,Gao D,et al.An improved unscented kalman filter based on STF for nonlinear systems [C]/ /2nd International Congress on Image and Signal Processing.Tianjin,China,2009: 1-5.
[14]陆可,肖建.双UKF算法及其在感应电机矢量控制中的应用[J].电机与控制学报,2007,11(6) : 564 -567,572.DOI: 10.3969/j.issn.1007-449X.2007.06.002.Lu Ke,Xiao Jian.Dual unscented Kalman filter algorithm and its application to the vector control system of induction motor[J].Electric Machines&Control,2007,11(6) : 564-567,572.DOI: 10.3969/j.issn.1007-449X.2007.06.002.(in Chinese)
[15]Xiong K,Zhang H Y,Chan C W.Performance evaluation of UKF-based nonlinear filtering[J].Automatica,2006,42(2) : 261-270.
[16]周东华,叶银忠.现代故障诊断与容错控制[M].北京:清华大学出版社,2000: 68-75.
PMSM parameters estimation based on dual STF-UKF algorithm
Lin Hui Lü Shuaishuai
(School of Automation,Northwest Polytechnical University,Xi'an 710129,China)
Abstract:To solve the parameter identification problem of the permanent magnet synchronous motor,the identification model of PMSM(permanent magnet synchronous motor) was analyzed.Regarding the parameters as slow varied states along with time and considering the presence of the system noise and measure noise,an improved unscented Kalman filter(UKF) algorithm was proposed based on the strong tracking filter(STF).This improved filter algorithm is able to estimate the parameters of PMSM including stator resistance,permanent magnet flux linkage and q-axis and d-axis inductance.The stability of the proposed algorithm was discussed.In order to reduce the calculation consumption of the algorithm,the four parameters were divided into two parts and estimated by dual STF-UKF,respectively.Simulation results show that the improved UKF algorithm can estimate the parameters accurately under different PMSM operations.
Key words:permanent magnet synchronous motor; parameters estimation; strong tracking filter; unscented Kalman filter;stability
基金项目:国家自然科学基金资助项目(51407143)、高等学校博士学科点专项科研基金资助项目(20136102120049)、中央高校基本科研业务费专项资助项目(3102014JCQ01066)、陕西省自然科学基础研究计划资助项目(2014JQ7264,2015JM5227)、陕西省微特电机及驱动技术重点实验室开放基金资助项目(2013SSJ1002).
收稿日期:2015-07-02.
作者简介:林辉(1957—),男,博士,教授,博士生导师,linhui@ nwpu.edu.cn.
DOI:10.3969/j.issn.1001-0505.2016.01.009
中图分类号:TM351
文献标志码:A
文章编号:1001-0505(2016) 01-0049-06
