利用MP提高GPS单点定位精度的研究
2016-05-06郭海林
郭海林,陈 亮
( 武汉大学卫星导航定位技术研究中心,湖北 武汉 430079)
利用MP提高GPS单点定位精度的研究
郭海林,陈亮
( 武汉大学卫星导航定位技术研究中心,湖北 武汉 430079)
Research on Improving GPS Point Positioning Precision by MP
GUO Hailin,CHEN Liang
摘要:多路径误差是GPS定位重要的误差源之一,本文利用MP(多径组合观测值)对观测值受到的多路径效应进行定量评价,在GPS伪距单点定位中降低受多路径效应影响的观测值的权重,达到削减多路径误差提高定位精度的目的,最后通过试验验证了此方法的有效性和可靠性。
关键词:伪距单点定位;MP;定权;多路径效应
多路径误差是GPS导航定位中难以削弱的误差之一,其对伪距观测的影响在良好环境条件下约为3.1 m,在反射很强的环境条件下约为4~5 m[1]。因此,为了提高GPS伪距单点定位的精度,多路径误差就成为一个必须考虑的误差源[2-3]。
目前解决多路径误差的方法大致可分为两类:改进接收机硬件的方法和数据后处理方法。改进接收机硬件主要集中在对天线构造的改良,对接收机内部载波跟踪环、延迟锁定环性能及接收机信号处理方法的改进。而对于大多数用户,解决多路径误差主要集中在数据后处理方法,包括天线阵列法[4]、环境建模法[5],以及利用小波进行数值分析的方法[6-7]等误差模型法,这些方法大多只适用于静态观测,解算较为复杂且其中关键步骤较难掌握[8]。随机模型法对动态观测也适用,是一种比较实际可靠的方法,故本文主要对随机模型法进行研究。传统的随机模型包括等权模型和高度角模型,等权模型认为所有卫星的观测值等精度,该模型没有顾及由于不同卫星信号的传播路径不同,相应的观测值精度也不同;高度角模型认为低仰角卫星比高仰角卫星更易受多路径误差影响,依据高度角对观测值赋予不同的权值,虽然该模型在一定程度上能削弱多路径误差影响,但是多路径误差不只是与高度角相关,其还与测站周围环境密切相关,该模型对削弱多路径误差的效果有限[9]。故本文提出一种基于MP定权的GPS伪距单点定位随机模型(MP模型),该模型依据MP能够反映伪距多路径效应,通过MP定权来削弱多路径误差,从而达到提高GPS伪距单点定位精度的目的。
一、多路径效应及MP组合观测值
GPS测量中,被测站附近的反射物所反射的卫星信号进入接收机天线,对直接来自卫星的信号产生干涉,使观测值偏离真值,这种由于多个路径的信号传播所引起的干涉时延效应称为多路径效应。多路径效应与卫星相对于接收机天线的空间关系及测站周围的环境相关,对伪距观测值的影响较大。
GPS伪距单点定位中,设某历元测站对某颗卫星进行观测,其观测的伪距方程可表示为
P1=ρ+c(δtr-δts)+Trop+I1+M1+εP1
(1)
P2=ρ+c(δtr-δts)+Trop+I2+M2+εP2
(2)
式(1)—式(2)中,P1、P2为双频伪距观测值;ρ为卫星至测站的几何距离;c为真空中的光速;δtr、δts分别为接收机和卫星的钟差;Trop为对流层延迟;I1、I2分别为f1、f2上对应的电离层延迟;M1、M2为伪距多路径效应;εP1、εP2为伪距中的随机噪声。
由L1、L2载波相位观测量,其观测方程可表示为
λ1φ1=ρ+c(δtr-δts)+Trop-I1-λ1N1+Mφ1+εφ1
(3)
λ2φ2=ρ+c(δtr-δts)+Trop-I2-λ2N2+Mφ2+εφ2
(4)
式(3)—式(4)中,φ1、φ2分别为L1、L2载波相位观测值;λ1、N1分别为L1载波相位的波长和整周模糊度;λ2、N2分别为L2载波相位的波长和整周模糊度;Mφ1、Mφ2分别为L1、L2载波相位多路径效应;εφ1、εφ2分别为L1、L2载波相位观测噪声。
P1-λ1φ1=2I1+M1+λ1N1+εP1
(5)
由式(3)和式(4)并顾及I1/f22=I2/f21,得
(6)
将式(6)代入式(5),并整理得

(7)
其中
同理得

(8)
其中
式(7)—式(8)中,MP1和MP2为多径组合观测值,其包含伪距观测值的接收机内部噪声和伪距多路径误差,B1、B2为载波相位的模糊度组合,当无周跳发生时,其为不变的常数项。
在一个连续无周跳的弧度,计算伪距多路劲效应时,将Mp1和Mp2中的常数部分剔除,进而可得到各卫星伪距多路劲效应随历元的变化
(9)
式中,〈Mp1〉、〈Mp2〉为某连续无周跳弧度Mp1、Mp2的平均值[10]。
二、基于MP定权的GPS伪距单点定位方法
本文采用消电离层伪距观测值消除电离层一阶项影响,观测方程为
(10)
式中,V=[V1V2…Vn]T;
δX=[dxdydzcdt]T;


对于等权模型,卫星i的伪距观测值方差为
(11)
对于高度权模型,卫星i的伪距观测值方差为[11]
(12)
对于MP模型,卫星i的伪距观测值方差为
(13)
式中,f1、f2分别表示L1、L2载波的频率;k为指定的常数,通常为0.5~1.5。根据式(13)对该历元所有n颗卫星的观测值进行观测值方差确定,设方差阵为C,则有
(14)
对方差C阵求逆,即可得到观测值的权阵[12]。
三、试验分析
试验选取2014年第119天全球均匀分布的30个测站,所有数据均包含GPS双频观测值,采样间隔设为30 s,测站全球分布如图1所示。
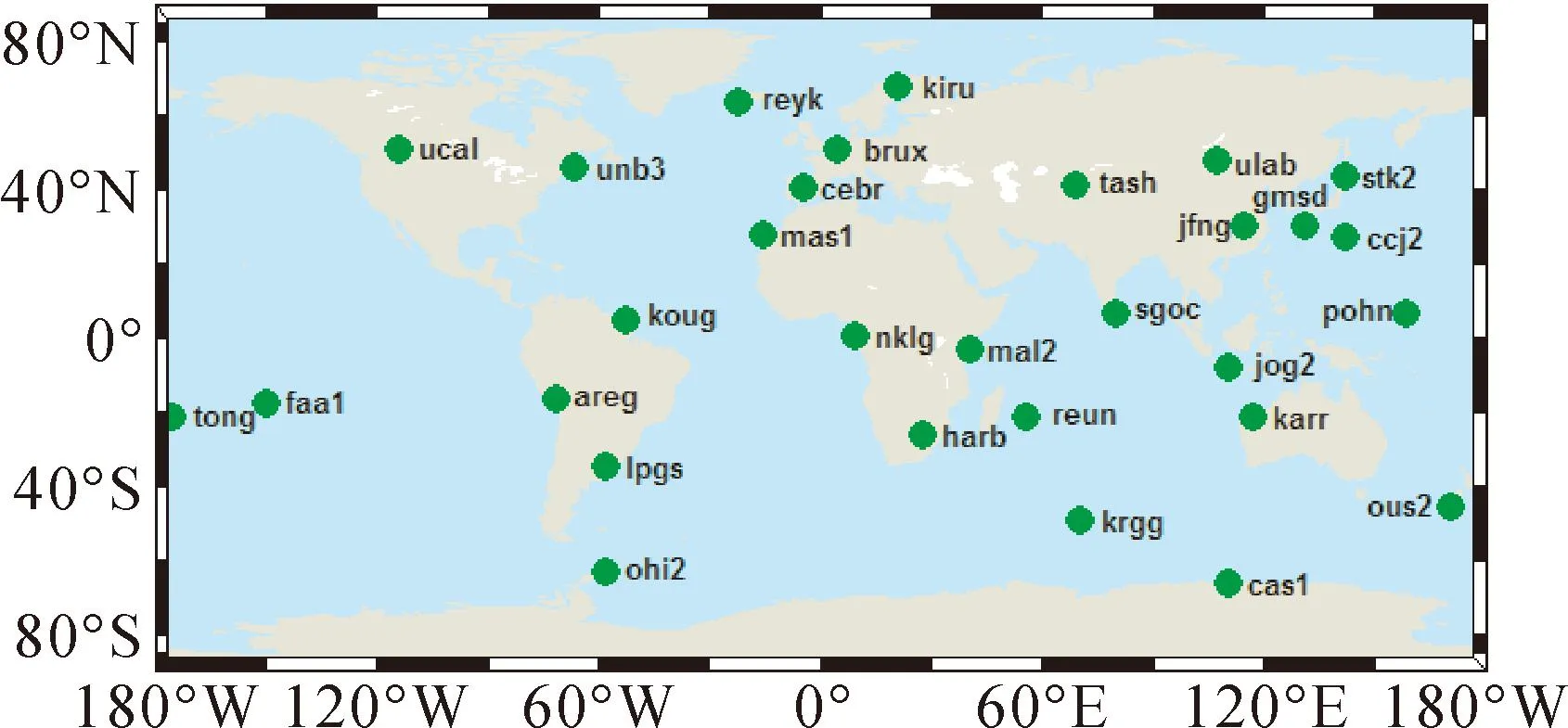
图1 测站全球分布图
1. 试验1——多路径特性分析
图2为MP与高度角的关系图,由图2可知,MP1、MP2统计值随高度角增大而减小(MP1的这种统计关系相比于MP2更明显),高度角模型就是利用了MP与高度角的这种统计关系。
为讨论方便,以该天的harb站为例进行讨论。图3为以harb站为站心的卫星轨迹图和卫星可见性图,由图3可知,G27卫星在0:00—8:00可视,可视期间连续且高度角变化较大,故选择该卫星进行分析。
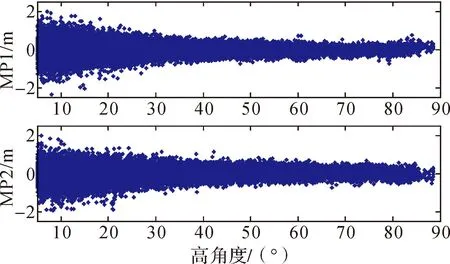
图2 MP随高度角的变化关系
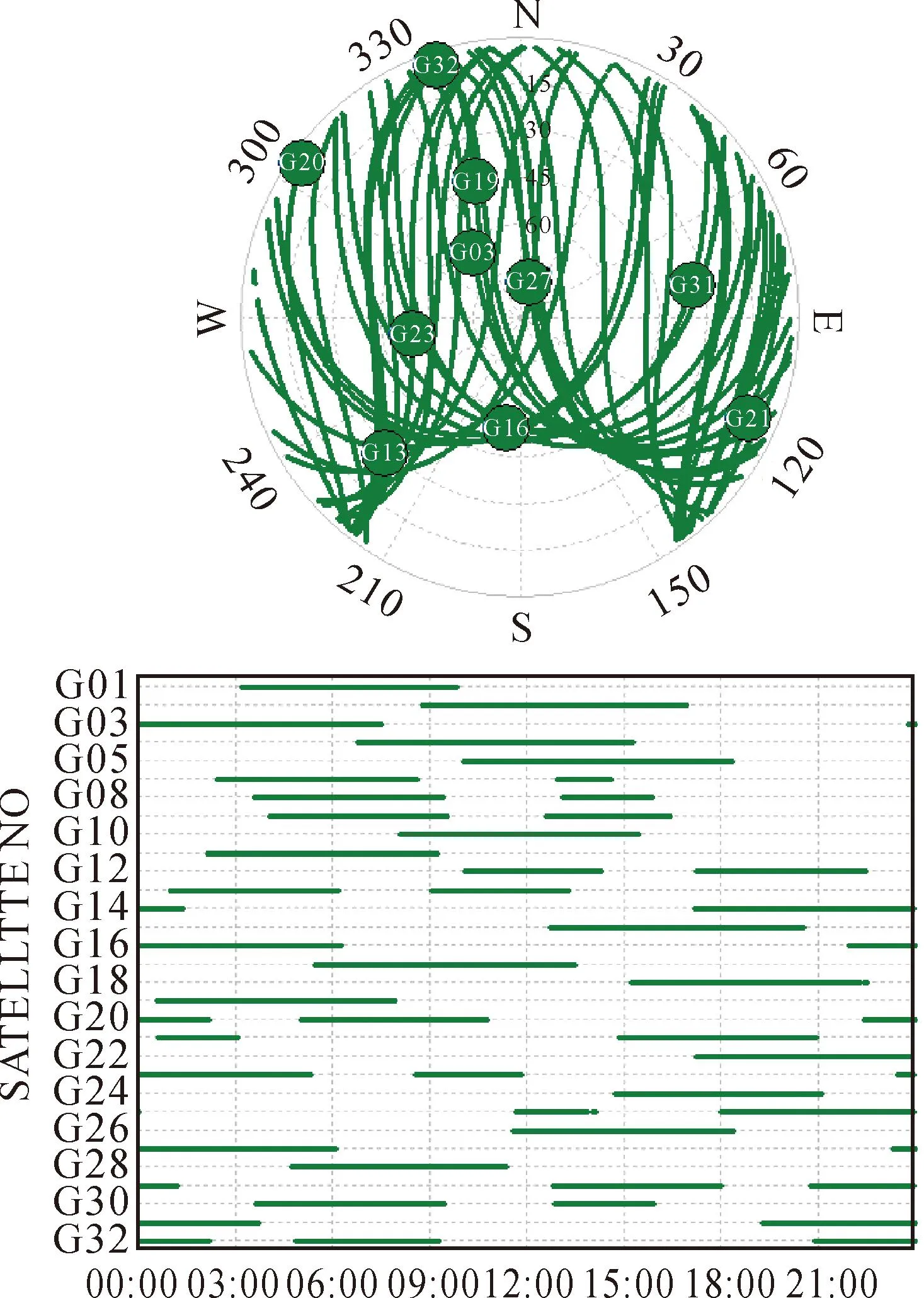
图3 以harb站为站心的卫星轨迹图和卫星可见性图
图4为G27卫星高度角、MP的时间序列图,由图4可知,MP与高度角虽然存在统计关系,但是MP与卫星相对于测站的空间关系及测站周围的环境密切相关,其随时间变化存在随机性,MP2这种随机性相比于MP1更明显。因此,高度角模型只考虑到多路径效应的统计特性,没有考虑多路径效应随机特性,高度角加权法对削弱多路径误差的效果有限,故本文提出MP定权模型来削弱多路径误差,以达到提高GPS单点定位精度的目标。
2. 试验2——不同随机模型定位比较
图5给出了harb站等权模型、高度角模型、MP模型3种模型的GPS单点定位的三维误差时间序列图,以及RMS值,参考坐标为IGS分析中心CODE提供的harb站坐标,截止高度角设为5°。由图5可知,高度角模型和MP模型对GPS单点定位都有一定的改善效果,MP模型的改善效果更明显,高度角模型相比于等权模型在N、E、U方向分别改善了13.3%、8.9%、7.4%;MP模型相比于等权模型在N、E、U方向分别改善了33.9%、32.2%、28.5%。
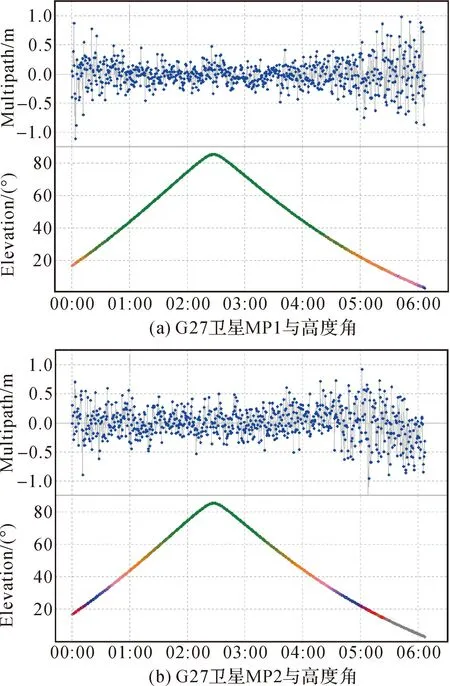
图4
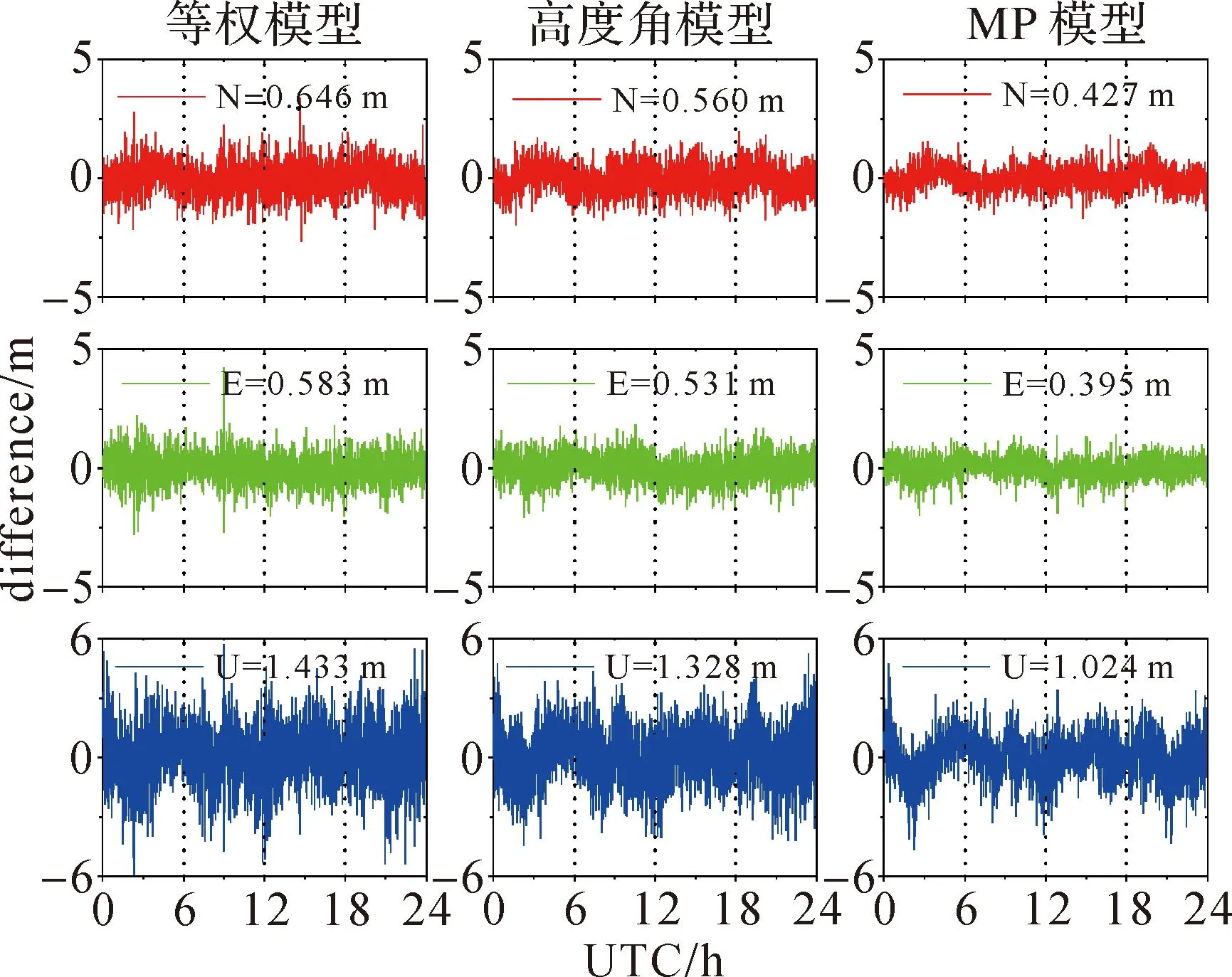
图5 harb站不同随机模型GPS单点定位误差时间序列
m
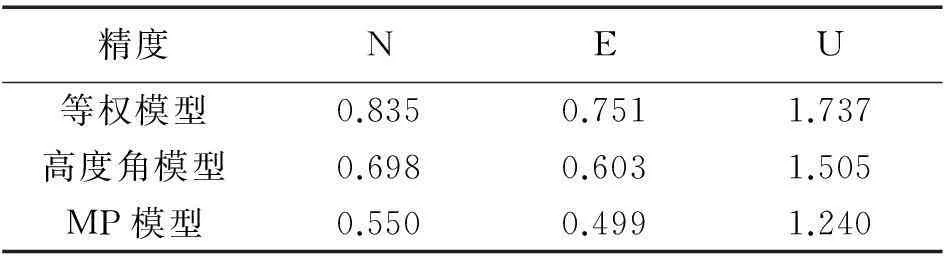
表1给出了30个站等权模型、高度角模型、MP模型的GPS单点定位三维精度平均值。由表1可知,高度角模型相对于等权模型的定位精度在N、E、U方向平均分别提高大约16.4%、19.7%、13.4%;MP模型相对于等权模型的定位精度在N、E、U方向平均分别提高大约34.1%、33.6%、28.6%。MP模型相对于高度角模型的定位精度在N、E、U方向平均分别提高大约21.2%、17.2%、17.6%。
四、结束语
本文提出一种基于MP定权的GPS伪距单点定位随机模型(MP模型),该模型依据MP能够反映伪距多路径效应,通过MP定权来削弱多路径误差达到提高GPS伪距单点定位精度的目的。对比等权模型、高度角模型、MP模型,MP模型在N、E、U 3个方向的单点定位精度都优于等权模型和高度角模型。试验结果表明,MP模型相对于等权模型的GPS单点定位精度在N、E、U方向分别提高大约34.1%、33.6%、28.6%,MP模型相对于高度角模型的GPS单点定位精度在N、E、U方向分别提高大约21.2%、17.2%、17.6%。
参考文献:
[1]田旦,郭玉斌.浅谈GPS测量中多路径效应的影响[J].江西测绘,2008,73(2):10-13.
[2]谢世杰,种绍龙,袁铭.论GPS测量中的多径误差[J].测绘通报,2003(5):1-5.
[3]孙常建,杨晓超.GPS多路径效应规律研究[J].测绘通报,2006(11):12-15.
[4]RAY J K. Mitigation of GPS Code and Carrier Phase Multipath Effects Using a Multi-Antenna System.[D].Calgary:University of Calgary,2000.
[5]LAU L, CROSS P. Development and Testing of a New Ray-tracing Approach to GNSS Carrier-phase Multipath Modeling[J].Journal of Geodesy, 2007,81(11):713-732.
[6]夏林元.GPS观测值中的多路径效应原理研究及数值分析[D].武汉:武汉大学,2002.
[7]黄丁发,丁晓利,陈永奇,等.GPS多路径效应影响与结构振动的小波筛分研究[J].测绘学报,2001,30 (1):36-41.
[8]张波.削弱GPS多路径效应的实用研究[D].武汉:武汉大学,2002.
[9]薛志宏.GNSS动态变形测量关键技术研究[D].郑州:信息工程大学,2012.
[10]李玮,程鹏飞,秘金钟.基于PPP技术的伪距多路径效应分析[J].大地测量与地球动力学,2011,31(3):98-101.
[11]HAN S. Quality-control Issues Relating to Instantaneous Ambiguity Resolution for Real-time GPS Kinematic Positioning [J]. Journal of Geodesy, l997,71(6):351-361.
[12]易重海.实时精密单点定位理论与应用研究[D].长沙:中南大学,2011.
中图分类号:P228
文献标识码:B
文章编号:0494-0911(2016)03-0025-04
作者简介:郭海林(1992—),男,主要从事大地测量与精密定位相关研究工作。E-mail:hailinG@whu.edu.cn
收稿日期:2015-01-13; 修回日期: 2015-11-08
引文格式: 郭海林,陈亮. 利用MP提高GPS单点定位精度的研究[J].测绘通报,2016(3):25-28.DOI:10.13474/j.cnki.11-2246.2016.0078.