GPS信号改正参数研究
2016-05-06王冬霞赵金贤胡彩波
辛 洁,任 晖,王冬霞,赵金贤,胡彩波
(北京卫星导航中心,北京 100094)
GPS信号改正参数研究
辛洁,任晖,王冬霞,赵金贤,胡彩波
(北京卫星导航中心,北京 100094)
A Study on Correction Parameters of GPS Signal
XIN Jie,REN Hui,WANG Dongxia,ZHAO Jinxian,HU Caibo
摘要:精确的信号改正参数是提高导航定位精度的关键。为了对导航定位服务进行有效的经营,需要在每一个信号离开卫星发播天线的时间内,考虑钟差、通道延迟、码相位位移、用户钟偏差,以及电离层、对流层等大气因素的影响。通过对GPS导航电文结构的研究,给出了单、双频用户的钟差改正参数、设备群延迟改正参数、电离层改正参数等参数算法,并在此基础上给出了信号间改正参数(ISCs)的算法。最终结合改正参数的应用范例,对改正参数应用的可行性进行了分析。
关键词:改正参数;导航定位精度;导航电文结构;信号间改正参数;可行性
自1973年美国国防部正式批准了以军事目的而建设的全球定位系统(Global Position System,GPS)方案[1]以来,系统已进行了大量的提升用户服务性能及增加在线能力的现代化改造[2]。发射入轨的新一代卫星有着更精准的时钟和更强的扩展能力,能播发新增信号。地面控制网增加了终端跟踪网络密度,增强了播发给用户的导航信息(navigation,NAV)中卫星钟和卫星轨道预测的计算能力。GPS接收机的生产商通过探索空间信号(signal in space,SIS)特性,寻求解决显著的地理空间问题途径,研发更好的测量方法,并使得旧的解决方法更加健全。
对于民用用户,GPS现代化最让人兴奋的方面在于新增加了3个定位服务信号[3]:L2C、L5和L1C(与L1C定位服务信号一样,L5在同一载波上拥有2个独立的定位服务信号)。拥有新信号和传统L1 C/A信号等多重信号的现代化卫星能够剔除由电离层路径延迟造成的抗差双频或三频测距误差,并提供3种谱的独立服务。如果出现射频干扰(radio frequency interference,RFI)致使3个频率中1个或2个不可用,剩余的频率均可独立使用。
为了对4个民用定位服务进行有效的经营,在每一个信号离开卫星发播天线的时间内,需要考虑信号间偏差(inter-signal corrections,ISBs)的测距影响。同时,为了简化接收机设置,不考虑接收机正在使用哪一个或组合信号/服务,在播发属于新L2C、L5和L1C定位服务信号的民用导航(civil navigation,CNAV)信息中加入内部信号改正参数[4]。4个民用信号中的每一个都有一个以L1 P(Y)为参考码的ISC参数。
一、改正参数算法
1. 钟差改正参数
对双频用户来说,广播星历子帧1发播的系数描述了发播参数时间间隔的偏差。该项改正用于计算卫星钟差偏差项、漂移和龄期,同时,也用于计算群延迟偏差和平均群延迟差异的补充特性。但这些系数不包括相对论效应改正,用户设备还需要确定相对论改正。一般而言,改正信号接收时刻时间和天线相位中心的卫星码相位时间偏差(以GPS时间为基准)关系为
t=tSV+ΔtSV
(1)
(2)
式中,t表示GPS系统时间,若t-tOC大于302 400 s,从t中减去604 800 s;若t-tOC小于-302 400 s,则在t中加上604 800 s;tSV表示电文发射时刻有效的码相位时间,当由GPS时计算得到系数值时,tSV的敏感性可忽略;ΔtSV表示卫星PRN码相位时间偏差;af0、af1、af2为多项式系数;tOC表示钟差参考时刻;Δtr表示相对论效应改正项

(3)
(4)
在估计NAV参数时,控制段将用下面的等价公式进行相对论效益改正
(5)
式中,R是卫星的瞬时位置向量;V是卫星的瞬时速度向量;c是光速。此式不受地固旋转坐标系还是地心惯性坐标系的限制。
2. 设备群延迟改正算法
改正项TGD起初用来计算L1 P(Y)和L2 P(Y)间的设备群延迟,主要用作基于合同商在卫星制造时的测量。每个卫星的TGD会不断更新,以反映真实的在轨设备群延迟差异。该改正项主要是为单频用户考虑。
当用户仅使用L1 P(Y)进行码相位偏差改正时,公式如下
(ΔtSV)L1P(Y)=ΔtSV-TGD
(6)
当用户仅使用L2 P(Y)进行码相位偏差改正时,公式如下
(ΔtSV)L2P(Y)=ΔtSV-γ12TGD
(7)
将L1和L2的标准频率记为fL1和fL2,得到
(8)
TGD不等于卫星设备群延迟差异的均值,而是测量值,代表平均设备群延迟差异乘以1/(γ12-1),从而得到双频用户的表达式TGD为
TGD=1/(γ12-1)((ΔtSV)L1P(Y)-(ΔtSV)L2P(Y))
(9)
3. 电离层改正算法
电离层延迟是导航定位系统不可忽略的主要误差源[5-6]。由于电离层具有色散特性,不同频率穿过电离层时产生的折射效应不同[7-9],利用这个特性就可以估计电离层对卫星导航信号传输引入的延迟量。
对于L1 P(Y) 和L2 P(Y),TGD与L2 P(Y) ISC成固定的倍数关系,即
ISCL2P=(1-γ12)TGD
(10)
通过将涉及L1P和L2P的式(1)和式(2)相减,再代入式(14)的比例关系,得到电离层改正评估方程为
(11)
从而得到电离层偏差
(12)
对于双频用户来说,电离层效应改正过的伪距方程为
(13)
式中,PR表示电离层效应改正过的伪距;PRi表示i通道测得的伪距值。
若双频用户需对有电离层引起的群延迟进行改正,得到电离层与群延迟间的关系如下
(14)
双频用户可通过时间延迟差对接收时刻进行改正,对于单频用户可采用以下模型进行改正,从而使由电离层传播效应造成的RMS误差降低至少50%。如果在扩展运行阶段或卫星处于自主导航模式时,GPS运控系统(OCS)无法上传数据,则使用该模型将会产生不可预知的后果。电离层改正模型为
(15)

二、ISCs算法
伪距测量涉及自由空间距离、地面站接收机偏差、电离层、对流层、相关性、卫星和地面钟差,以及信号间改正等因素影响。这里仅给出L1P、L2P、L1CA、L2C和L5Q的伪距方程,其他信号方程类似。在各种操作中均不考虑流层、相关性、时钟等影响因素,不将它们列入方程。以L1 P(Y)码信号为例,所有内部信号的伪距测量定义与L1P的关系如下
PRL1P=R+iono
(16)
PRL2P=R+γ12iono-ISCL2P+BL2P
(17)
PRL1CA=R+iono-ISCL1CA+BL1CA
(18)
PRL2C=R+γ12iono-ISCL2C+BL2C
(19)
PRL5Q=R+γ15iono-ISCL5Q+BL5Q
(20)
式中,PRi表示基于频率i的伪距测量; R表示自由空间距离;iono表示电离层改正;Bi表示地面站频率i与L1P的偏差;ISCi表示频率L1P和频率i间的信号间改正;γij表示频率i和频率j的平方比。
1.L1C/A的ISC
通过将涉及L1P和L1C/A的式(1)和式(3)相减,得到L1C/A的信号间改正评估方程为
ISCL1CA=PRL1P-PRL1CA+BL1CA
(21)
2.L2C的ISC
通过将涉及L2P和L2C的式(2)和式(4)相减,得到L2C信号间改正评估方程为
PRL2P-PRL2C=ISCL2C-ISCL2P-(BL2C-BL2P)
(22)
又由TGD与L2P(Y)ISC成固定的倍数关系得到
(23)
3.L5Q的ISC

(24)
三、改正参数的应用
对于用户接收机来说,典型的改正参数应用如图1所示。接收机基于卫星播发时间估计,得到钟差改正多项式、对流层模型及电离层模型后,再结合码相位位移、通道延迟、GPS时间、用户钟偏差等参数值后,进行过滤和坐标转换,从而得到用户位置、速度和时间。其中,ERD表示导航电文改正表(NMCT)中的伪距估计误差。每个ERD值由地面站计数,代表卫星星历误差减去光速和卫星钟差乘积的径向分量。卫星星历及钟差通过当前估值减去广播值得到。因此,ERD值可以用于改正用户观测伪距。
PRc=PR-ERD
(25)
式中,PRc表示经NMCT中的ERD值改正过的伪距。
美国研制的广域增强系统(wideareaaugmentsystem,WAAS)已成功利用经验模型和观测数据实现GPS星历改正数、钟差改正数和电离层延迟改正数的分离和计算,并通过地球同步轨道卫星(geostationaryearthorbit,GEO)将改正数和GPS星座的完好性状况向覆盖区广播。
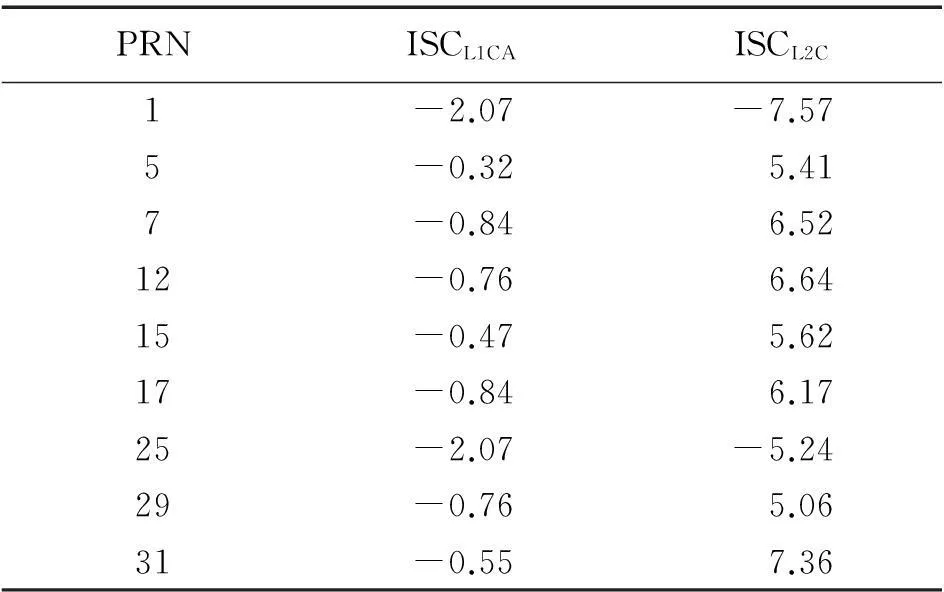
2013年6月,ISCs首次作为在轨导航电文信息的一部分播发,标志着ISCs参数评估进入在轨试验阶段。根据美国全球定位系统现代化民用导航信号(CNAV)现场直播测试计划,在轨卫星播发的部分ISC值[10]见表1。

图1 改正参数的应用范例
ns
目前在轨播发的ISC值还存在欠缺,其主要原因之一在于包含未标校的监测站偏差,监测站偏差通常有零点几纳秒的偏差;同时,在轨观测ISC值仅源于单监测站的观测,存在不可预知的偏差。
四、结束语
本文基于对GPS导航电文结构的研究,给出了单双频用户的钟差改正参数、设备群延迟改正参数、电离层改正参数等参数算法,并在此基础上给出了以L1 P(Y)为参考码的L2P、L1CA、L2C和L5Q间的ISC参数算法,最后结合监测接收机应用改正参数及ISCs在轨播发实例,对改正参数的可行性进行了初步分析。
近几次局部战争表明,美军所具备的“导航优势”是其在战争中占有绝对作战优势的关键因素,发展卫星导航系统及开展导航定位技术的应用研究究已成为各国关注的焦点。面对新的国际形势,注重跟踪研究国外卫星导航系统及其军事应用技术的动向,发展我国独立、高效、稳定安全的卫星导航导航系统,不断提高我国卫星导航技术的应用水平,有着十分重要的意义。
参考文献:
[1]PARKINSON B. Global Positioning System: Theory and Applications, Vols I and II[R]. Washington DC:American Institute of Aeronautics and Astronautics, Inc,1996:19-24.
[2]朱筱虹, 李喜来, 杨元喜. 从国际卫星导航系统发展读加速中国北斗卫星导航系统建设[J]. 测绘通报, 2011 (8): 1-4.
[3]陈俊勇. 构建全球导航卫星中国国家级连续运行站网[J]. 测绘通报, 2009 (9): 1-3.
[4]MICHAEL J. Global Positioning System Directorate Systems Engineering & Integration Interface Specification IS-GPS-200 Navstar GPS Space Segment/Navigation User Segment Interfaces[EB/OL]. (2011-09-21)[2015-04-25]. http:∥www.gps.gov/technical/icwg/IS-GSP-200F.pdf.
[5]李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社, 2005: 96-99.
[6]焦明连, 蒋廷臣, 王秀萍. 基于GNSS电离层模型研究进展[J]. 测绘科学, 2008, 33(5): 91-93.
[7]王明诚,马煦,翟稳科. 提高增强系统电离层延迟改正数估计的方法研究[J].全球定位系统,2006 (6):10-14.
[8]WU Xiaoli, HU Xiaogong, WANG Gang, et al. Evaluation of COMPASS Ionosphere Model in GNSS Positioning[J]. Advances in Space Research, 2013, 51(6):959-968.
[9]张伟, 邱卫宁, 畅鑫. 基于球谐函数模型的GPS差分码延迟估计[J]. 测绘通报, 2013(6): 19-21.
[10]FEESS W, COX J, HOWARD E, et al. GPS Inter-Signal Corrections (ISCs) Study[C]∥Proceedings of the 26th International Technical Meeting of the ION Satellite Division, ION GNSS+2013. Nashville: The Institute of Navigation, 2013: 1244-1248.
中图分类号:P228
文献标识码:B
文章编号:0494-0911(2016)03-0022-03
作者简介:辛洁(1988—),女,硕士,工程师,主要研究卫星导航定位系统。E-mail:15810539683@139.com
收稿日期:2015-02-10; 修回日期: 2015-11-03
引文格式: 辛洁,任晖,王冬霞,等. GPS信号改正参数研究[J].测绘通报,2016(3):22-24.DOI:10.13474/j.cnki.11-2246.2016.0077.