水下航行器近海底铺缆运动仿真研究
2016-05-03尹汉军焦慧锋俞永清
付 薇,尹汉军,许 可,马 岭,焦慧锋,俞永清
(1.中国船舶科学研究中心,江苏无锡214082;2海洋石油工程股份有限公司,天津300451;3.陆军装备部试验监管局,北京100012)
水下航行器近海底铺缆运动仿真研究
付 薇1,尹汉军2,许 可1,马 岭1,焦慧锋1,俞永清3
(1.中国船舶科学研究中心,江苏无锡214082;2海洋石油工程股份有限公司,天津300451;3.陆军装备部试验监管局,北京100012)
使用水下航行器进行铺缆较水面船铺缆有众多优势。为了快速有效地完成铺缆任务,该文对水下航行器近海底铺缆运动进行了仿真研究,分析了放缆速度、相对海流速度和航行高度等参数对铺缆运动的影响。在此基础上,为一台载人潜水试验艇拟定了近海底铺缆试验方案,并成功完成了试验任务。
水下航行器;铺缆;仿真
0 引 言
随着全球通信、海底探测和海洋能源开发等需求的不断扩大,水下海缆的使用越来越广泛。传统的铺缆船受海上风浪情况影响较大,作业时间受到一定的限制;随着海水深度的增加,铺缆船需要不断地调整放缆速度或张力,实际操作困难,容易造成海缆悬空或堆积现象;同时铺缆船在水面航行的路径易被侦测和记录,使我国的海底信息网络暴露,存在巨大的安全风险。相对于海面铺缆船,应用水下航行器进行近海底铺缆,可有效避勉海面恶劣风浪环境的影响,大大降低铺缆高度,减小了海缆因拉力过大而破坏的可能性,对铺缆运动状态的控制更容易,隐蔽性更强。
工程中,铺缆按控制方式大致分为两种:张力铺缆和余量铺缆。余量铺缆是一种控制速度的铺缆方法,海缆以松弛的、自然的状态沉入海底,其落地点张力为零。张力铺缆是一种控制海缆张力的布缆方法,海缆被抽出来,其运动速度等于船速,没有布放余量[1]。本文以某水下航行器为研究对象,其铺缆装置选用余量铺缆方法。
影响铺缆过程的因素有很多,如拖曳速度、航行高度、放缆速度和缆绳参数等,铺缆过程中的合理控制,可以避免海缆出现过紧或过松的情况。本文建立了水下航行器、海缆构成的铺缆作业系统的稳态模型,根据海缆的相关参数,分析影响速度和铺缆张力的因素,并编制程序进行过程仿真,将仿真所得海缆张力值及合理的布缆速度值提供给水下航行器运动控制系统,以完成水下航行器的姿态调整,保证铺缆任务快速有效进行。
1 铺缆稳态运动过程计算模型
1957年,Zajac[2]第一次提出了铺缆过程的静态研究方法,随后很多学者对铺缆运动过程进行了研究。Yoshizawa和Yabuta[3]提出了海缆张力的解析方法,指出底部触底张力主要由拖船速度和水深决定,所得结果与实验值也很吻合,但其忽略了切向流体阻力的影响。Pate[4]将海缆离散为一系列连续的单元,提出了敷缆过程瞬态特性的数值模型。Vaz[5]提出了海缆弹性单元在受到切向流动时的三维静态模型。Yang等人[6]提出了一种半解析方法,对海缆铺设过程的张力进行分析,其首先通过忽略切向阻力得到各点预估倾角值,再通过将相邻两点倾角的平均值作为其新的倾角值,以达到考虑切向阻力影响的效果。本文在Yang等人的基础上,将切向阻力直接列入平衡方程中,消除了因其近似方法带来的误差。
1.1 基本假设
根据实际铺缆的海域环境及水下航行器航行情况,作如下假设:
(1)海缆为柔性的,不能传递弯矩;
(2)水流为二维均匀流动的;
(3)艇和缆的尺寸相对波浪长度很小,所以使用Morsion方程计算水动力;
(4)所受水动力在法向和切向上符合独立性原理,互不影响。
1.2 运动平衡方程
图1(a)为铺缆过程的示意图,图中采用了OXY-惯性坐标系,坐标原点O在海缆与海底接触点处,X轴方向与水下航行器前进方向一致,Y轴为重力方向;obt-海缆局部坐标系,o在所取海缆单元中点处,t轴为海缆在o点处的切线方向,b为海缆在o点处的法线方向。为了得到稳态铺缆时的海缆受力平衡方程,取海缆微段ds进行受力分析,如图1(b)所示。
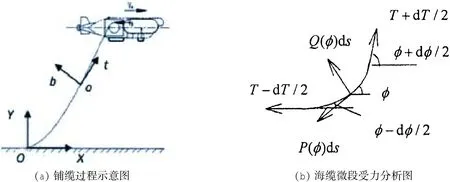
图1 铺缆示意图与受力分析图Fig.1 Schematic of cable-laying and stress analysis
图中T为微段中间点处所受张力,P和Q为重力、浮力和流体作用力在切线和法线方向上的合力,φ为t轴与X轴夹角,对微段在局部坐标系下列平衡方程得:

由于dφ为微量,所以

整理方程得:

其中:P=ft+wsin( φ),Q=fn-wcos( φ),ft,fn分别为单位长度切向和法向流体阻力,本文采取适合圆形截面缆的Pode模型[7]:

其中:vt=vp-vcscosφ,vn=vcssinφ分别为拖缆相对海流的切向和法向速度,vp为放缆速度,vcs为海缆相对海流速度,Cf和Cn分别为海缆的切向和法向阻力系数,本文中分别取定值为0.025和1.2[8]。
同时由惯性系OXY坐标的几何关系可得:dx=dscosφ,dy=dssinφ,与(4)中两式共同组成一阶常微分方程组:

1.3 模型建立及仿真方法确定
对于上述一阶常微分方程组的求解,四阶龙格库塔法有很好的精度和稳定性,已被广泛采用。求解(6)式中的方程形式时,需对缆长进行空间离散,但在铺缆过程中,缆长是不断变化的,微段数也将不断变化,将带来很多不便。由于航行器是定高进行铺缆的,所以海缆释放点与海底接触点之间的垂直高度是固定不变的,将(6)式的微分变形为对变量y的微分,并将海缆按垂直高度等距离离散为N段,如图2所示,与海底接触点为第1个结点,与艇接触点为第N+1个结点,离散方程如下式:
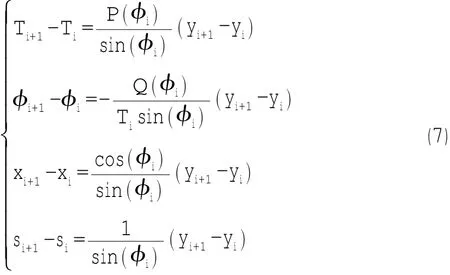
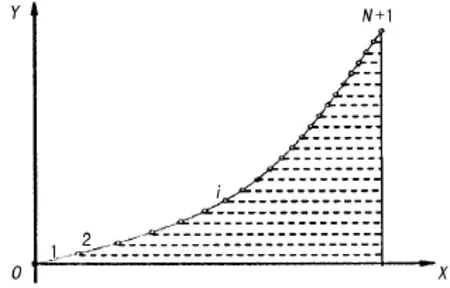
图2 模型离散示意图Fig.2 Model of discrete
1.4 边界条件

2 仿真分析影响因素及海试方案设计
2.1 程序验证
为了验证本程序算法的正确性,计算与参考文献[6]相同的工况,并与其仿真结果进行对比,如图3所示。

图3 与参考文献输出结果对比图Fig.3 Compared with the results of reference
从图形趋势和数量级可以验证本程序的正确性,同时结果也有所偏差,缆形最大相对偏差为2.5%,张力最大相对偏差为0.32%,主要原因是Yang等人对切向阻力的处理采取了一些简化的估算,其首先通过忽略切向阻力得到各点预估倾角值,再通过将相邻两点倾角的平均值作为其新的倾角值,以达到考虑切向阻力影响的效果,本文所用方法没有进行类似简化,而是直接将切向阻力考虑在平衡方程中进行求解。
2.2 影响因素分析
影响敷缆过程的主要因素包括放缆速度、水下航行器相对海流速度和水下航行器运行高度,在进行海试之前,了解各因素对运动的影响,可以有效帮助铺缆任务的设计,海试时也可供驾驶人员参考以操控水下航行器。
2.2.1 放缆速度对运动的影响
放缆速度受到绞车转速的制约,选择余量铺缆方式时,也受到运行速度的制约。如果放缆速度过大,会造成海缆在海底堆积;速度过小,已经铺设到海底的海缆内部会产生残余拉力,容易导致海缆被破坏。所以对放缆速度的影响分析是非常必要的,下面给出放缆速度在0.8-2.0 m/s之间五种情况的海缆张力图和位形图。
四、尤其是对裁负有文化特征或符号的母材(如瓷、铜质等等),改良和否定后产生的能源力更具有品值和品德。从而也引领了对雕塑本体的习惯势力,而进入它的当下状态及症侯。
从图中可以看出,放缆速度对缆形的影响不大,因为放缆速度的变化主要影响海缆相对海流切向的速度,所以该趋势是合理的;随着放缆速度的增大,在缆长方向上张力也有增大的趋势,同样是因为海缆相对海流切向速度的增大,导致切向阻力增大,张力自然随之增大。
图4 不同放缆速度下的平衡位形图和张力分布图Fig.4 The equilibrium configuration and tension distribution under different laying speeds
2.2.2 水下航行器相对海流速度对运动的影响
水下航行器相对海流速度的变化包括两种情况,水下航行器航速的变化和海流速度的变化,但体现在海缆上受力的变化,统一归结为水下航行器相对海流速度的变化。清楚了航行器相对海流速度,有助于驾驶员在海流速度变化时对水下航行器的速度进行相应的调节,下面给出了相对速度分别在0.12 m/s,0.15 m/s,0.18 m/s,0.21 m/s和0.24 m/s时的一组海缆平衡位形图及张力分布图,如图5所示。
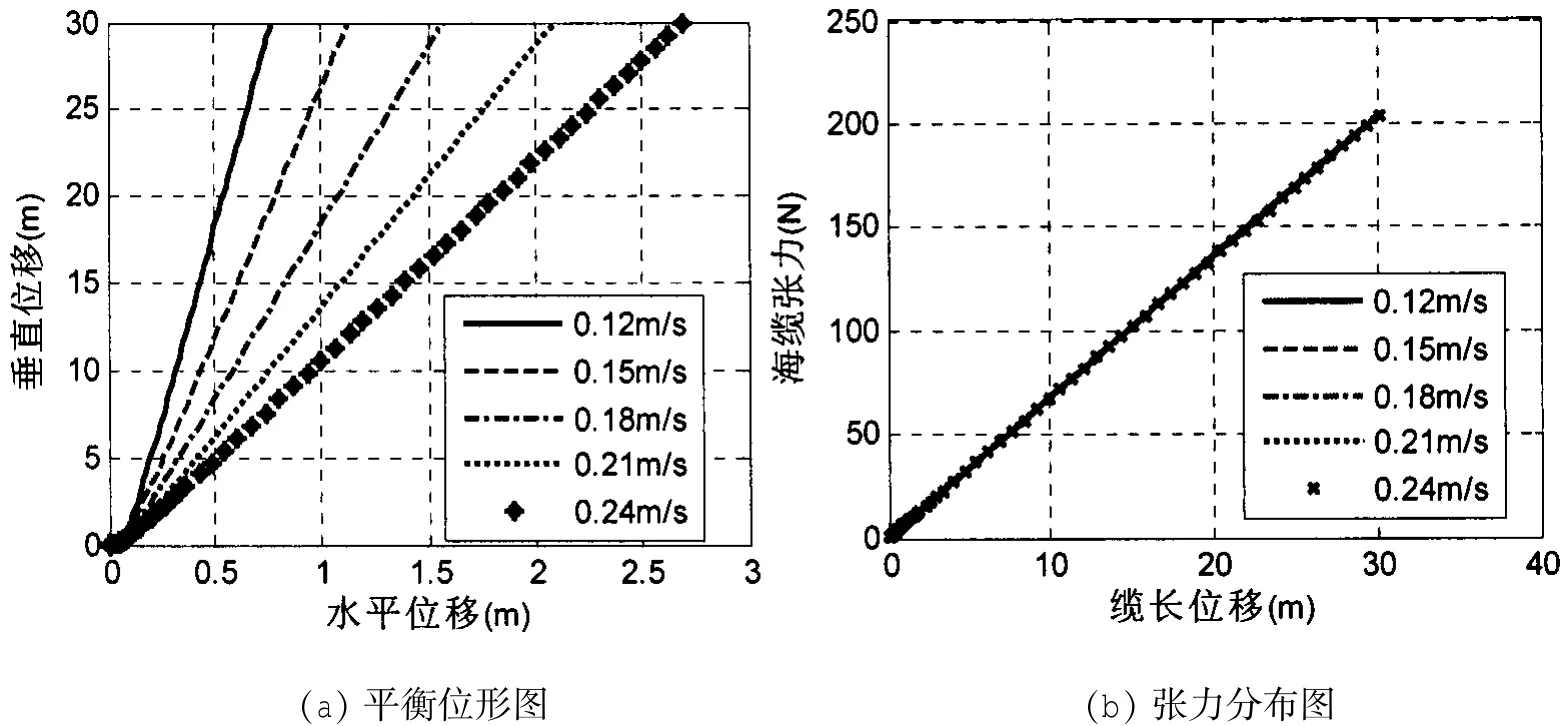
图5 不同相对速度下平衡位形图和张力分布图Fig.5 The equilibrium configuration and tension distribution under different relative speeds
从图5(a)可以看出,相对速度的变化对缆形有比较明显的影响,随着相对速度的增大,缆形趋于平缓,由于法向速度会随之增加,所以所得变化趋势是合理的;从图5(b)可以看出,相对速度的变化对张力分布的影响非常微弱。
2.2.3 航行高度对运动的影响
为了考察运行高度对铺缆运动的影响,分别让航行器定高航行在3 m、3.5 m、4 m和4.5 m的情况进行仿真,得到结果如图6所示。
由图中结果可以看出,在所考察的高度范围内,随着高度的增加,缆形和张力曲率没有变化,只是在原来高度基础上进行了延伸,在张力对航行器的作用力处于纵倾调节范围内时,可以根据需要调节航行器定高来完成铺缆任务。
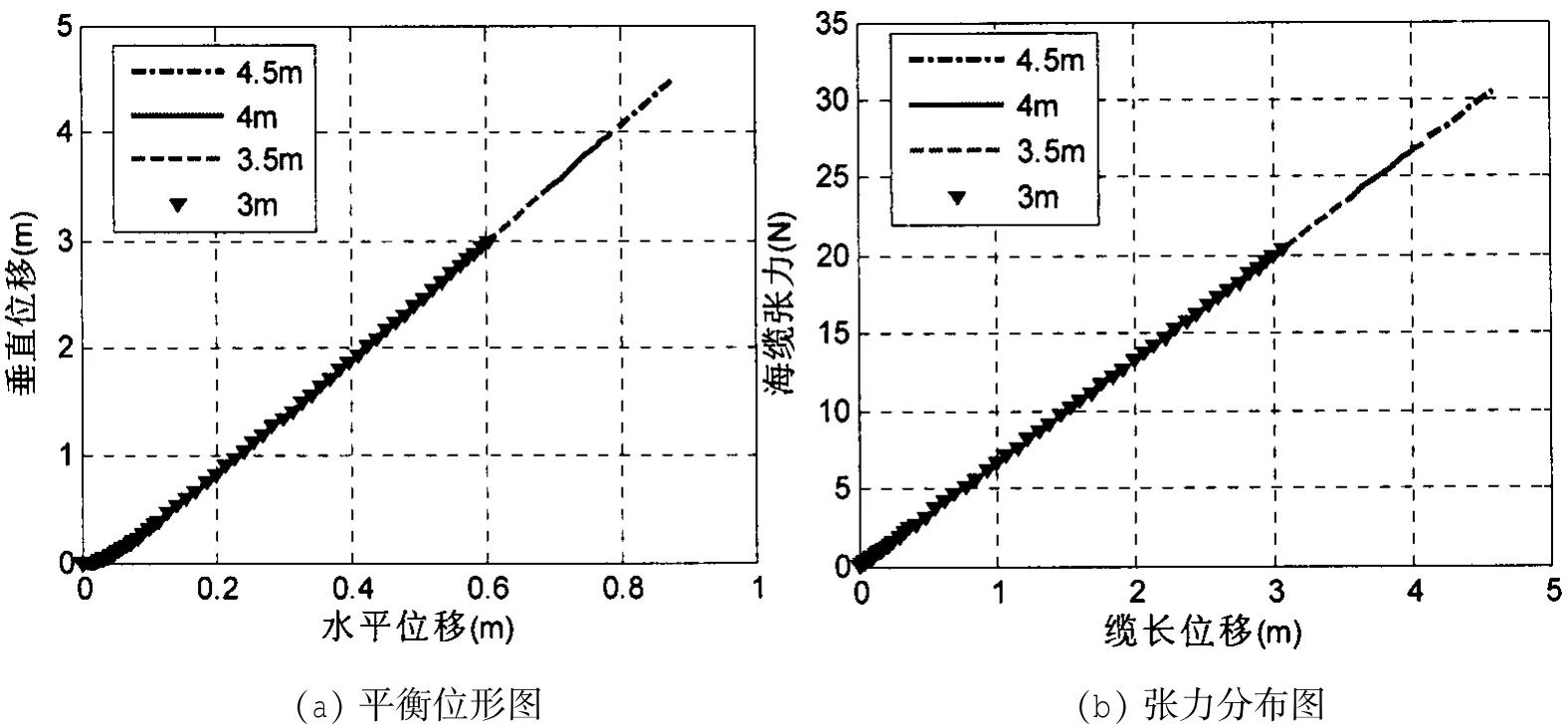
图6 不同定高航行时的平衡位形图和张力分布图Fig.6 The equilibrium configuration and tension distribution under different heighs
2.3 海试方案设计与结果
2.3.1 海试方案确定及仿真
经过上述的分析以及海试地点海流情况的考察,最终确定了铺缆海试任务的详细设计方案,具体参数值列在表1中。在海试前,本程序给出了仿真结果,如图7所示,由于选取余量敷缆方法进行试验,海缆自由落入海底,所以可以认为落地点处的倾角为0,张力为0,但为了避免运算出现奇异,输入时取张力为0.1 N,倾角为0.1°。
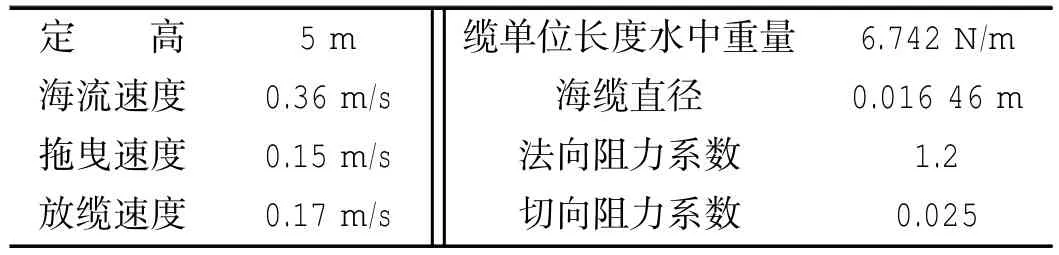
表1 海试各参数Tab.1 Parameters of sea trials
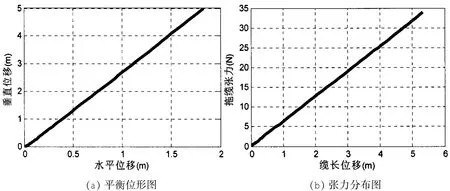
图7 海试方案仿真结果Fig.7 The simulation result of sea trial
由图可以看出,整段缆中海缆与航行器连接处的张力最大,为23.6 N左右,在已知航行器重浮力大小和重心、浮心位置,绞车安装位置的情况下,可以得到海缆对航行器作用力所引起的纵倾,经计算,约为0.13°,在水下航行器所具有的纵倾调节范围内。
2.3.2 海试概况
该水下航行器采取上述试验方案进行了海试,虽然方案给出的各参数为固定值,但实际试验过程中会有波动,操作人员根据试验艇反馈的航行速度调节放缆速度,使放缆速度大于航行速度,保证余量铺缆。航行器记录的深度、航速和放缆速度数据如图8(a)和8(b)所示,图8(c)为铺设成功后机械手提起海缆进行插拔测试的照片。
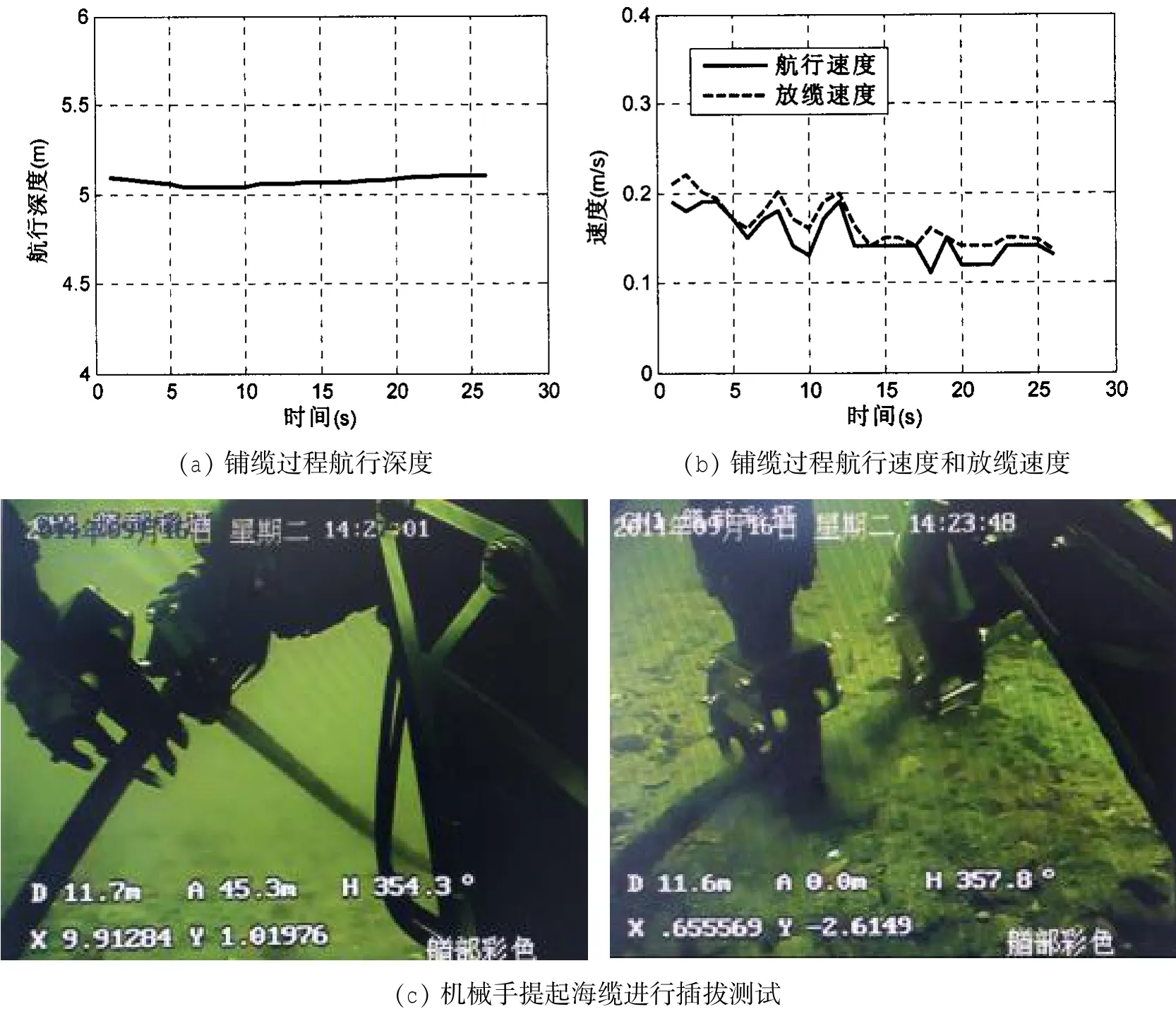
图8 海试结果Fig.8 The result of sea trial
3 结 论
本文通过理论分析和程序仿真,对海缆铺设稳态过程的缆形和张力分布进行了研究,与参考文献的结果对比验证了本程序的正确性,并进一步讨论了放缆速度、水下航行器相对海流速度和距海底运行高度对铺缆过程的影响,得到如下结论:
(1)在余量铺缆的基础上,放缆速度对海缆平衡位形影响微弱,张力分布会随着放缆速度的增大而相应地增大;
(2)相对速度的变化对缆形有比较明显的影响,随着相对速度的增大,缆形趋于平缓,更容易满足海缆的最小弯曲半径要求,其对张力分布的影响微弱;
(3)运行高度的变化不会影响平衡位形和张力分布的变化趋势,只是随着高度的增加,缆形和张力在原来的高度基础上有一定的延伸。
应用仿真分析所得结果,探讨了该水下航行器铺缆任务的详细方案,最终成功完成了海试任务。
[1]张太佶,胡晓为.海底电缆在敷设中的受力分析[J].船舶,2009,20(3):15-20. Zhang Taiji,Hu Xiaowei.Tension analysis in submarine cable laying[J].Ship&Boat,2009,20(3):15-20.(in Chinese)
[2]Zajac E.Dynamics and kinematics of the laying and recovery of submarine cable[J].Bell Syst.Tech.,1957,36(5):1129-1207.
[3]Yoshizawa N,Yabuta T.Study on submarine cable tension during laying[J].IEEE Oceanic Eng.,1983,8(4):293-299.
[4]Patel M,Vaz M.The transient behaviour of marine cables being laid-the two dimensional problem[J].Appl.Ocean Res., 1995,17(4):245-258.
[5]Vaz M,Witz J,Patel M.Three dimensional transient analysis of the installation of marine cables[J].Acta Mech,1997,124 (4):1-26.
[6]Yang N,Jeng D S,Zhou X L.Tension analysis of submarine cables during laying operations[J].The Open Civil Engineering Journal,2013:282-291.
[7]连 琏,王道炎,王玉娟.深海观测系统脐带缆形态分析及计算[J].海洋工程,2001,19(1):65-69. Lian Lian,Wang Daoyan,Wang yüjuan.Simulation of cable behavior of underwater towing system[J].Ocean Engineering, 2001,19(1):65-69.(in Chinese)
[8]连 琏,高志希,沈国鉴.水下圆形截面缆索的流体动力性能的理论计算及试验研究[J].海洋工程,1987,5(2):27-35. Lian Lian,Gao Zhixi,Shen Guojian.Theoretical calculation and experimental study of hydrodynamic performance of underwater cables with circular cross section[J].Ocean Engineering,1987,5(2):27-35.(in Chinese)
Simulation research on cable laying of underwater vehicle sailing near seafloor
FU Wei1,YIN Han-jun2,XÜ Ke1,MA Ling1,JIAO Hui-feng1,YÜ Yong-qing3
(1.China Ship Scientific Research Center,Wuxi 214082,China;2.Offshore Oil Engineering Co.,LTD,Tianjin 300451, China;3.Test Control Office,Departement of the Army Armament,Beijing 100012,China)
Underwater vehicle has superiority than surface vessel in cable laying.For completing laying task effectively and rapidly,this paper simulates cable laying when underwater vehicle sails near seafloor.The influences of cable pay-out rate,relative velocity between underwater vehicle and currents,sailing height of underwater vehicle on cable configuration and tension distribution are analysed.According to the analysis result,experiment scheme of one research boat is confirmed.The experiment is successful eventually.
underwater vehicle;cable laying;simulation
U661.7
:A
10.3969/j.issn.1007-7294.2016.10.004
1007-7294(2016)10-1244-08
2016-06-23
国家科技重大专项大型油气田及煤层气开发子课题“深水水下应急维修装备与技术”(2011ZX05027-005)
付 薇(1991-),女,工程师,E-mail:ambitious.91@163.com;尹汉军(1973-),男,高级工程师。
