蚁群算法在风电机组变桨控制中的应用
2016-05-03邓宁峰周腊吾
邓宁峰, 周腊吾, 陈 浩, 韩 兵,田 猛
(1. 湖南大学电气与信息工程学院, 湖南 长沙 410082; 2. 湖南世优电气股份有限公司, 湖南 湘潭 411100)
蚁群算法在风电机组变桨控制中的应用
邓宁峰1, 周腊吾1, 陈 浩2, 韩 兵1,田 猛1
(1. 湖南大学电气与信息工程学院, 湖南 长沙 410082; 2. 湖南世优电气股份有限公司, 湖南 湘潭 411100)
运行在额定风速以上区间时,变速变桨风力发电机组采用恒功率变桨控制方式,由于额定风速至切出风速之间的风速变化范围大且迅速,使得功率波动较大且频繁,传统PID变桨控制器难以达到很好的控制效果。本文提出的蚁群PID变桨控制器,利用蚁群算法的寻优特性来优化PID参数,使得恒功率变桨控制系统更具自适应性和鲁棒性。分析了风机的恒功率变桨控制,然后给出了蚁群算法优化PID参数的策略以及具体实现步骤。仿真与实验结果验证了蚁群PID变桨控制器的良好动态性能,其有效地减缓了额定风速以上风机的功率波动。
风力发电机组; 变桨控制; 蚁群算法; 恒功率控制
1 引言
近年来风力发电机朝着大型化的方向发展,功率等级不断增大[1],其功率的控制成为国内外的研究热点[2]。变速变桨风力发电机在低风速时能够保持最佳叶尖速比用以获得最大风能[3],在高风速时可以使功率输出更为平滑,现已成为大型风机的首选。此类风机在额定风速以下采用最大功率跟踪控制,桨距角保持0°以便获得最大气动功率;在额定风速以上采用恒功率变桨控制,通过调节叶片攻角来限制风能输入兼以调节发电机转速,从而使输出功率稳定为额定功率[4]。
由于风速的湍流特性以及风机较强的非线性耦合、转动惯量[5],传统PID变桨控制器对恒功率控制的效果一般,对此,国内外进行了许多控制方式的研究。文献[6]采用了风速前馈的方式,利用卡尔曼滤波和牛顿-拉夫逊算法来预估有效风值,给出合适的桨距角前馈值,以克服PID控制器滞后的特点,但是由于预估的误差可能较大,其效果可能不佳。文献[7]将径向基函数(RBF)神经网络引入风机的变桨控制中,用以解决风机较强的非线性耦合性,使其更具自适应性、稳定性。文献[8]使用模糊控制对变桨执行的变桨速度进行调整,这种新的思路相对于匀速变桨有更好的动态性能。类似于文献[6,7]这类智能控制方式虽然能达到很好的效果,但是其结构复杂,实际情况下难以实现。
传统PID控制器结构简单、稳定性强、控制精确且静态性能好,在工业生产中运用广泛,现代智能控制算法具备自适应性、自学能力,对于非线性时变系统控制效果好,将它们结合构成智能型与复合型的PID控制策略,能够同时具备两者的优点,且结构相对简单。
本文提出的蚁群PID变桨控制器,利用蚁群算法的寻优特性来优化PID参数,使得恒功率变桨控制系统更具自适应性和鲁棒性。文中分析了风机的恒功率变桨控制,然后给出了蚁群算法优化PID参数的策略以及具体实现步骤,随后的仿真与实验结果验证了蚁群PID变桨控制器的良好动态性能,其有效地减缓了额定风速以上风机的功率波动。
2 风力发电机组变桨控制机理
风力发电机的输出功率可由式(1)表示:
(1)
式中,ρa为空气密度;A为风轮面积(A=πR2,其中R为风轮半径);v为风速;λ为叶尖速比(λ=ωR/v,其中ω为风轮角速度);β为桨距角;Cp为风能利用系数。
风能利用系数Cp由风机叶片的空气动力学特性确定,可以通过叶尖速比λ与桨距角β的多项式近似拟合[9],如图1所示。
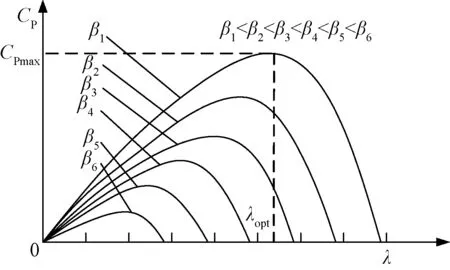
图1 不同桨距角下风力机Cp-λ特性曲线Fig.1 Wind turbine generator’s Cp-λ curves at different pitch angles
由图1可知,Cp-λ特性曲线的Cp极大值随着β的增大逐渐减小;当β1=0°时,存在一个最佳叶尖速比λopt使得风能利用系数达到最大值Cpmax,此最佳叶尖速比λopt所对应的最佳风轮角速度ωopt为:
(2)
最佳叶尖速比λopt与风轮的自身参数有关,在不同的风速v下,总存在一个ω使得风能利用系数达到最大,从而获得最佳输出功率。图2为风力发电机的P-ω特性曲线。
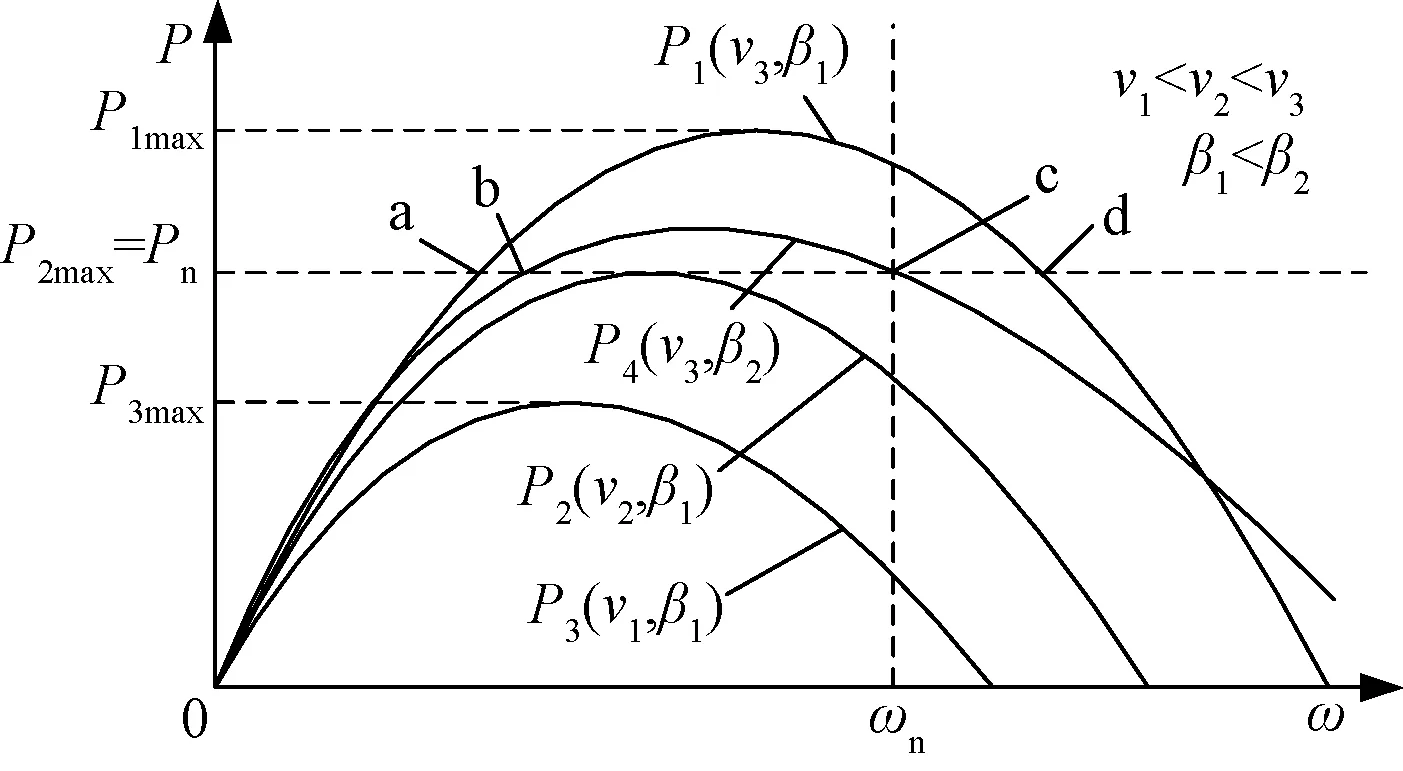
图2 风力发电机P-ω特性曲线Fig.2 Wind turbine generator’s P-ω curves
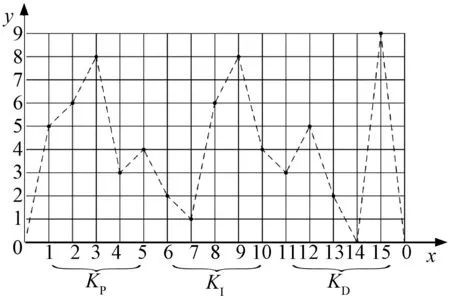
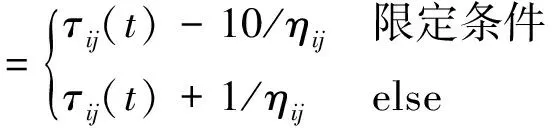
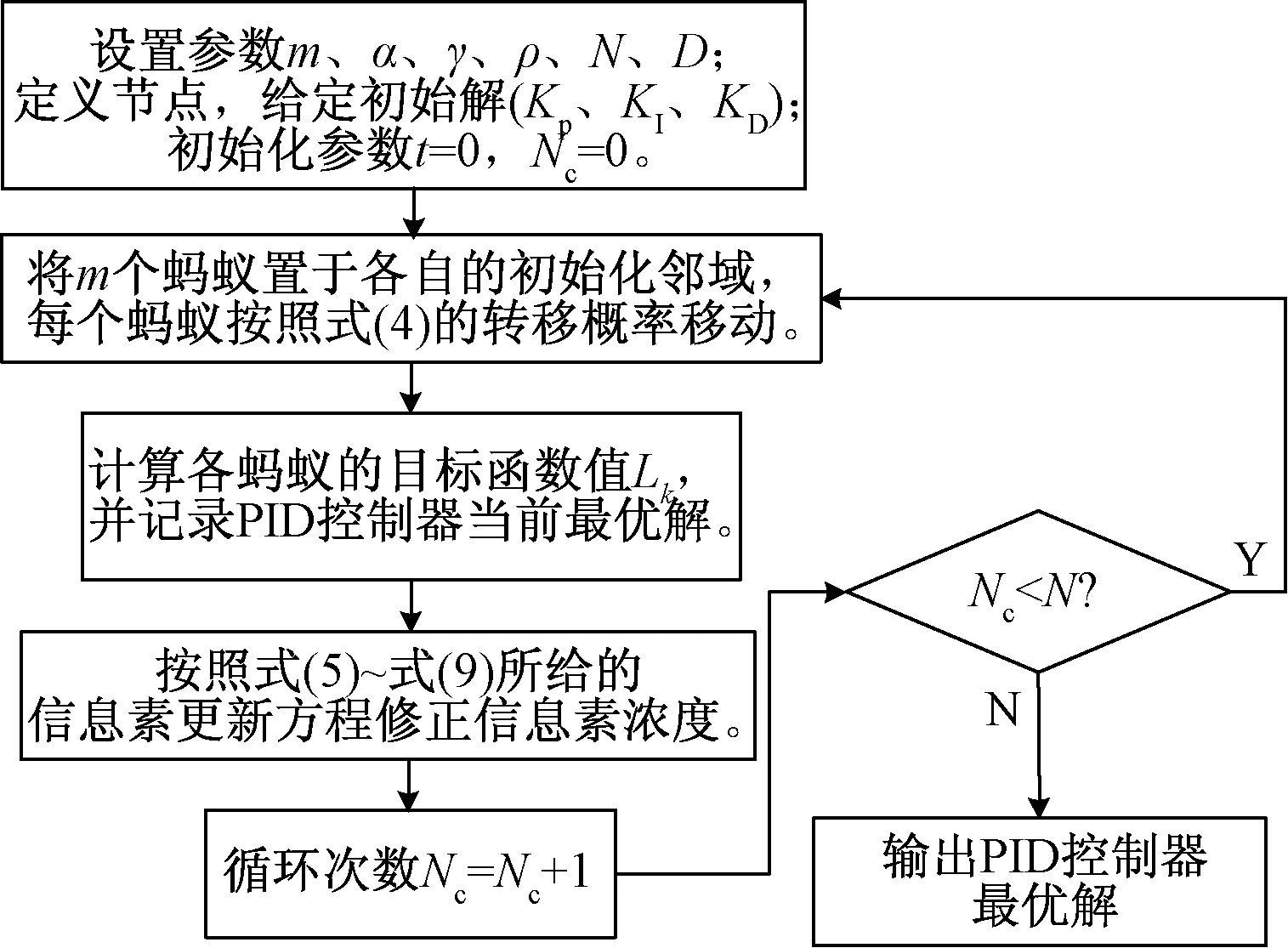
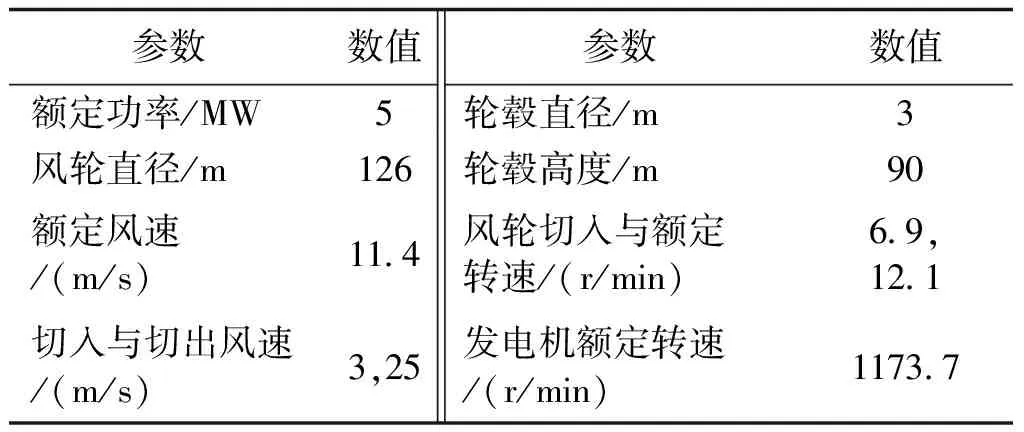
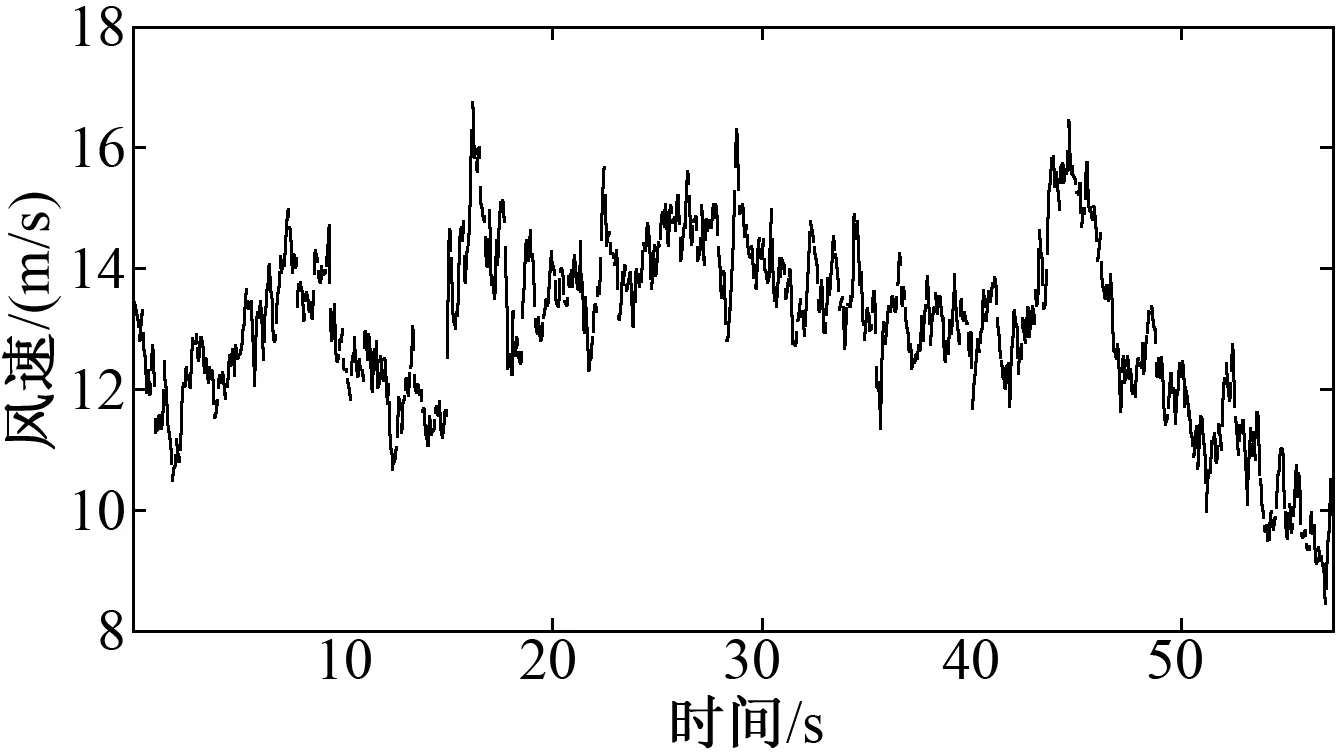
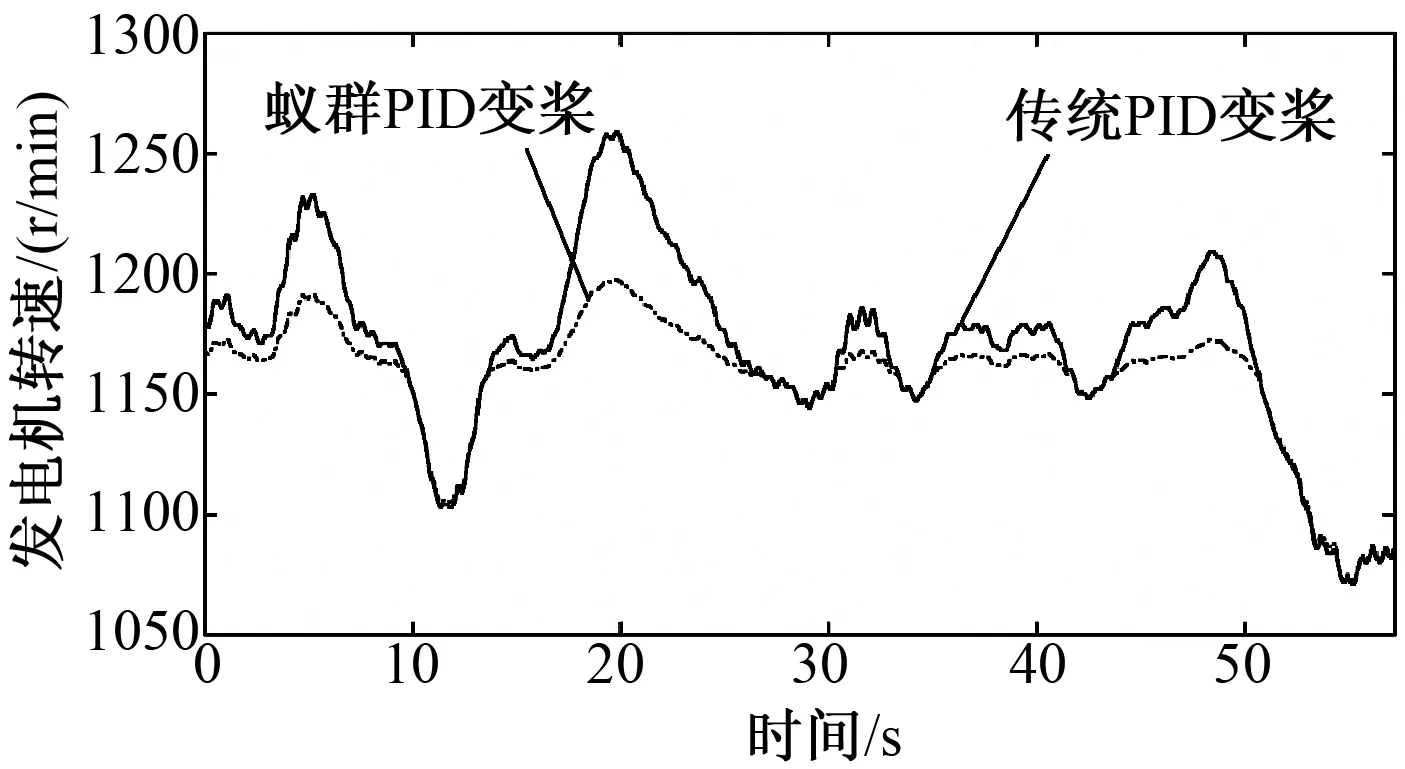
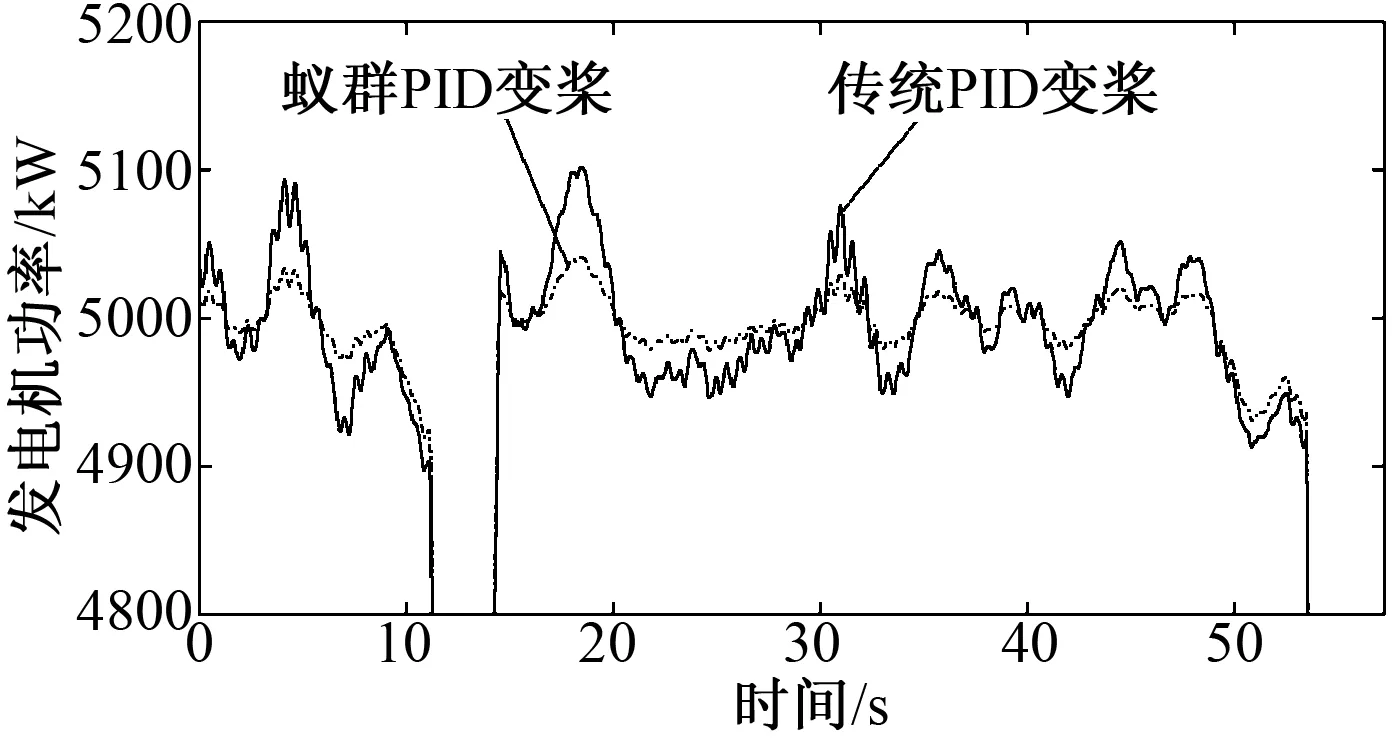
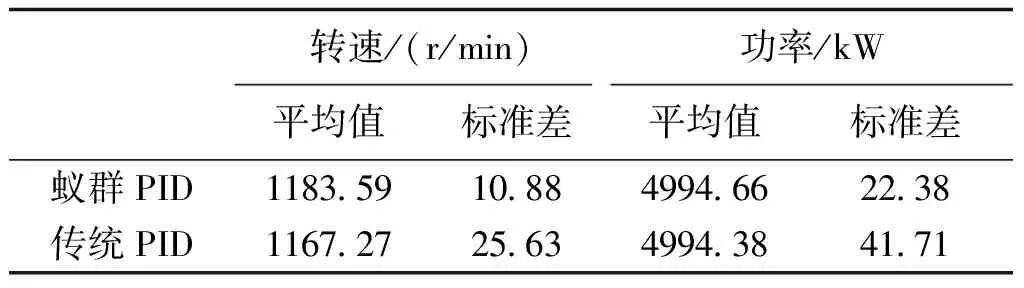
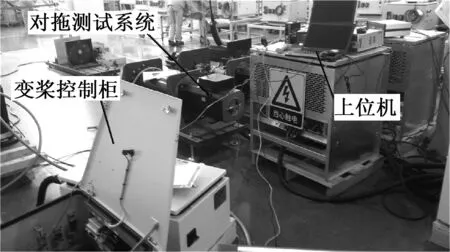
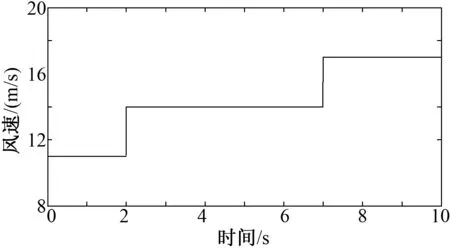
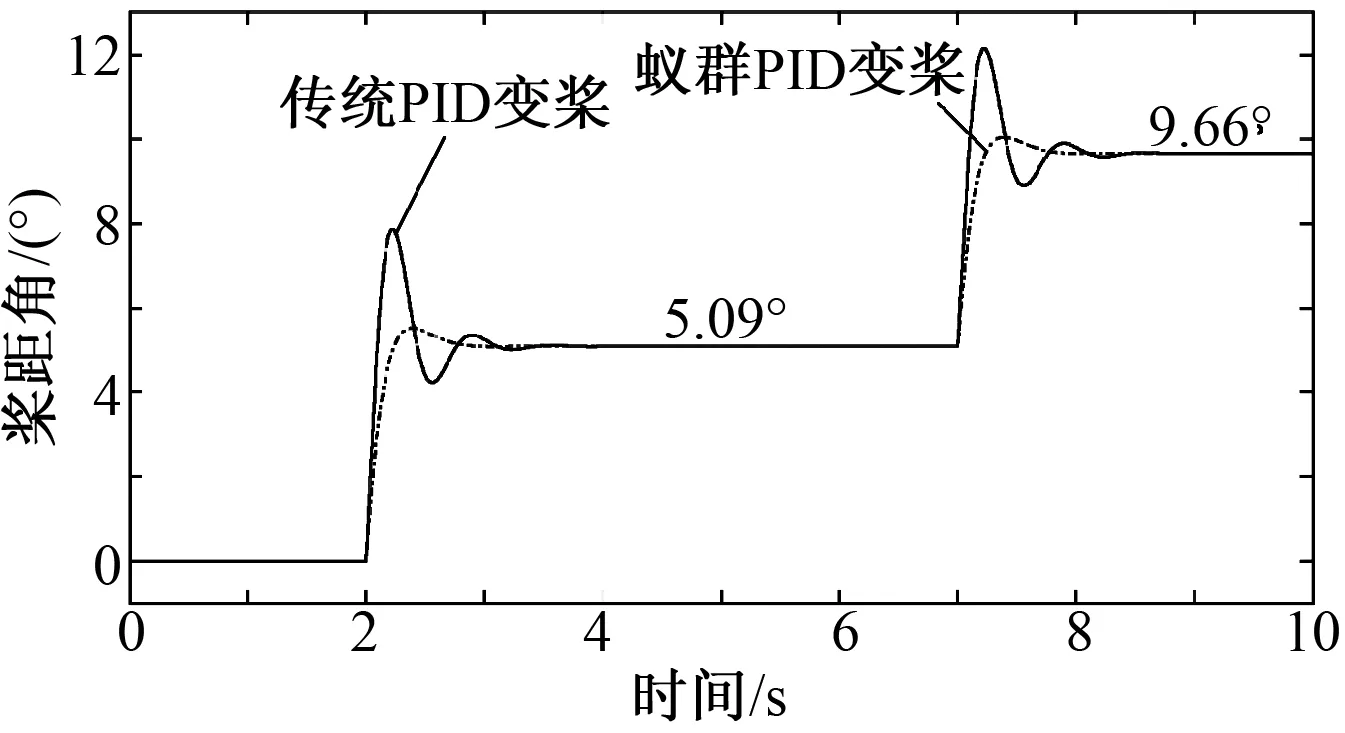
图2中,曲线P1、P2、P3为桨距角β1时风速不同情况下的功率-转速曲线,且v1 图3为改进的变桨控制框图。风速前馈控制器的作用是改善系统的响应速度[10]。风力发电机运行在额定风速以下时,桨距角保持0°不变以便获取最大风能,风速前馈控制器不参与变桨控制;运行在额定风速以上时,当发电机转速偏离额定转速时(风速此时也发生变化),通过蚁群PID控制器与风速前馈控制器叠加产生的桨距角给定βs来调节叶片攻角,同时控制转矩,限制转速变化从而稳定功率。 图3 改进的变桨控制系统框图Fig.3 Structure of new pitch control strategy 风电机组变桨控制需要在随机风速的扰动下快速稳定地调节桨距角,对于风力发电机这种大惯性、非线性时变系统来说,传统PID控制器的动态性能并不能令人满意。蚁群算法(Ant Colony Algorithm,ACA)是一类仿生优化算法,利用群体智能进行大规模并行寻优,通过分布式协作与正反馈来精确、快速地寻找最优路径[11]。本文使用蚁群算法的寻优能力来整定优化PID控制器参数,改善其动态性能[12]。蚁群PID控制器基本结构如图4所示。其中,r(t)为输入量(对应转速误差为ωref-ω);e(k)为偏差量;u(k)为控制量;y(t)为输出量(对应变桨控制信号βω);控制对象为转速ω。 图4 蚁群PID控制器结构图Fig.4 Structure of ACA-PID controller 蚁群算法需要一个性能指标来评价系统的性能,在旅行商问题(Traveling Salesman Problem,TSP)中,蚁群算法考虑了旅行周长作为目标函数,旅行周长越短路径越优[13]。本文考虑了误差、调整时间和超调量等约束条件,采用如式(3)所示的目标函数(性能指标): (3) 式中,ts为调整时间;h1、h2、h3、h4为权值且h3≥h1;N为仿真计算的总点数。 在控制对象模型与取样周期T已知的情形下,PID控制器只有三个参数Kp、KI和KD需要确定。寻优开始之前需为PID控制器的三个参数在二维坐标系下初始化节点。如图5所示,这只蚂蚁所经过的节点连接起来的路径代表其所寻的PID参数,其中(0,0)为起点或终点,横坐标1~5代表Kp,6~10代表KI,11~15代表KD,纵坐标值代表Kp、KI和KD的某一位,从小到大依次为个位和小数点后的4位。图5中Kp=5.6834,KI=2.1684,KD=3.5209。 图5 每只蚂蚁的寻优过程Fig.5 Parameter optimization process of each ant 定义蚂蚁k从节点i到节点j的转移概率为: (4) 式中,n为节点数量;s为某一节点;α表示轨迹的相对重要性,γ表示能见度的相对重要性,它们设定的值影响算法的收敛速度与解的准确性[14];τij(t)为支路(i,j)上的信息素浓度;ηij为支路(i,j)的可访问度,如下: (5) 式中,yk-1为节点j上次循环所产生的最优路径对应的PID参数在图5中的纵坐标值。算法每迭代n次(即蚂蚁完成一次周游),每条支路上的信息素浓度将根据式(6)和式(7)进行整体更新: (6) (7) (8) 式中,D为蚂蚁释放的信息素浓度;Lk表示蚂蚁k周游所确定的目标函数的值。 蚁群算法在迭代的过程中容易出现停滞和陷入局部最优等问题[15],本文采用一种局部信息素浓度更新策略,如式(9)所示。 (9) 式中,限定条件为:若本次迭代中有m/3只蚂蚁选择同一支路(i,j)或有m/5只蚂蚁选择该路径后终止本次迭代的周游。限定条件以外,信息量增幅过大容易使得更多的蚂蚁集中到一条路径上来,所以选取1/ηij为增量;限定条件内(即选择该路径的蚂蚁达到一定数量,或者多数蚂蚁选择该支路后,当前目标函数值大于上一次的目标函数值),选择10/ηij为削弱量,大幅削减其信息素浓度,使其值趋于各条支路的平均值,从而使得蚂蚁选择其他支路的概率增加,在加速收敛的同时避免早熟。蚁群算法PID参数优化的步骤如图6所示。 图6 蚁群算法PID参数寻优基本流程Fig.6 Parameter optimization process of ACA-PID controller 本文使用MATLAB联合FAST软件对蚁群PID变桨控制系统进行仿真,模拟随机风情况下蚁群PID变桨控制器与传统PID变桨控制器对抑制功率波动的效果。蚁群PID算法参数设置为:m=20,α=1,γ=1,ρ=0.7,N=100,D=100。仿真采用海上5MW风力发电机组模型,其具体参数如表1所示。 表1 风力发电机组参数 水平风速如图7所示,采用的随机风速信号在9~17m/s之间。桨距角变化曲线如图8所示。 图7 水平风速Fig.7 Horizontal wind velocity 图8 桨距角变化曲线Fig.8 Pitch angle position curve 不同方法下发电机的转速变化、功率变化的对比分别如图9和图10所示。可以看出,蚁群PID变桨控制方式对于额定以上区间的转速波动、功率波动抑制非常明显。具体指标的对比如表2所示,其中转速取1150r/min以上区间,功率取4900kW以上区间,计算其平均值与标准差。 图9 发电机转速变化曲线Fig.9 Generator speed curves 图10 发电机功率变化曲线Fig.10 Generator power curves 转速/(r/min)功率/kW平均值标准差平均值标准差蚁群PID11835910884994662238传统PID11672725634994384171 由表2可知,两种方法在额定附近的转速平均值、功率平均值变化不大,都在额定值附近;标准差的变化比较明显,蚁群PID变桨下转速标准差下降了约57.55%,功率标准差下降了约46.34%。由此可见,蚁群PID变桨控制方式对于改善恒功率控制系统的动态性能有着很好的效果,能够稳定发电机转速,进而减缓额定风速以上的功率波动,使得功率输出更加平稳。 为了测试蚁群PID变桨控制方式的效果,本文在如图11所示的变桨测试平台上进行了实验研究,该平台由上位机、对拖测试系统和变桨控制柜等组成。 图11 变桨测试平台Fig.11 Pitch control test platform 图12为给定的水平风速。风速范围在额定风速以上,2s时从11m/s上升至14m/s,7s时从14m/s上升至17m/s。 图12 风速给定Fig.12 Wind velocity set point 图13为两种控制方式的桨距角响应对比。可以看出蚁群PID变桨控制的桨距角响应超调量、调整时间均大幅下降,前者从44.5%降至8.5%,后者从1.79s降至0.90s;与此同时,振荡现象明显减弱。这表明蚁群PID变桨控制器能够更为快速、平稳地跟踪桨距角给定,进而更快地限制输入风能,控制转速稳定,减小功率偏差。 图13 传统PID与蚁群PID的桨距角响应Fig.13 Pitch angle response of T-PID and ACA-PID 变速变桨风力发电机组在额定风速以上采用恒功率变桨控制方式。额定风速至切出风速区间范围大,风速变化快且随机性强,另外风机转动惯量大,这些原因使传统PID变桨控制器控制效果欠佳,从而造成功率波动较大且频繁。针对此现象,本文提出蚁群PID变桨控制器,利用蚁群算法的寻优特性来优化PID参数,使其同时具有传统PID控制的静态稳定性和蚁群算法的自适应性。仿真与实验结果验证了蚁群PID变桨控制器的良好动态性能,其有效地减缓了额定风速以上风力发电机的功率波动。 [1] 施跃文, 高辉, 陈钟(Shi Yuewen, Gao Hui, Chen Zhong). 国外特大型风力发电机组技术综述(A summary on technical features of overseas multi-MW wind turbines)[J]. 电网技术(Power System Technology), 2008, 32(18): 87-91. [2] 周志超, 王成山, 郭力, 等(Zhou Zhichao, Wang Chengshan, Guo Li, et al.). 变速变桨距风电机组的全风速限功率优化控制(Output power curtailment control of variable-speed variable-pitch wind turbine generator at all wind speed regions)[J]. 中国电机工程学报(Proceedings of the CSEE), 2015, 35(8): 1837-1844. [3] 南晓强, 李群湛, 吴浩(Nan Xiaoqiang, Li Qunzhan, Wu Hao). 改进的最大功率跟踪算法在变速风力发电系统中的应用(Improved maximum power point tracking algorithms used in variable-speed wind-power generation system)[J]. 电工电能新技术(Advanced Technology of Electrical Engineering and Energy), 2013, 32(2): 102-106. [4] Cirrincione M, Pucci M, Vitale G. Neural MPPT of variable-pitch wind generators with induction machines in a wide wind speed range [J]. IEEE Transactions on Industry Applications, 2013, 49(2): 942-953. [5] 张鲁华, 蔡旭, 郭家虎(Zhang Luhua, Cai Xu, Guo Jiahu). 变速恒频双馈风力发电机组的非线性因素分析(Analysis on nonlinear factors of variable speed constant frequency doubly fed wind turbine generator system)[J]. 电网技术(Power System Technology), 2009, 33(19): 164-168. [6] 何玉林, 黄帅, 杜静, 等(He Yulin, Huang Shuai, Du Jing, et al.). 基于前馈的风力发电机组变桨距控制(Variable pitch control of wind turbine based on feed forward)[J]. 电力系统保护与控制(Power System Protection and Control), 2012, 40(3): 15-20. [7] Jafarnejadsani H, Pieper J, Ehlers J. Adaptive control of a variable-speed variable-pitch wind turbine using RBF neural network [A]. 2012 IEEE Electrical Power and Energy Conference (EPEC) [C]. 2012. 216-222. [8] 韦徵, 陈冉, 陈家伟, 等(Wei Zheng, Chen Ran, Chen Jiawei, et al.). 基于功率变化和模糊控制的风力发电机组变速变桨距控制 (Wind turbine-generator unit variable-speed pitch control based on judgment of power changes and fuzzy control) [J]. 中国电机工程学报(Proceedings of the CSEE), 2011, 31(17): 121-126. [9] 王金铭, 卢奭瑄, 何新, 等(Wang Jinming, Lu Shixuan, He Xin, et al.). 大型风力发电机风能利用系数参数拟合的研究(Study on parameters matching of rotor power coefficient for large scale wind turbine)[J]. 太阳能学报(Acta Energiae Solaris Sinica), 2012, 33(2): 221-225. [10] 郭鹏(Guo Peng). 模糊前馈与模糊PID结合的风力发电机组变桨控制(Variable pitch control of wind turbine generator combined with fuzzy feed forward and fuzzy PID controller)[J]. 中国电机工程学报(Proceedings of the CSEE), 2010, 30(8): 123-128. [11] 杨剑峰(Yang Jianfeng). 蚁群算法及其应用研究(Ant colony algorithm and its application)[D]. 杭州: 浙江大学(Hangzhou: Zhejiang University), 2007. [12] Navidi N, Bavafa M, Hesami S. A new approach for designing of pid controller for a linear brushless DC motor with using ant colony search algorithm [A]. Asia-Pacific Power and Energy Engineering Conference[C]. 2009. 1-5. [13] 杜鹏桢, 唐振民, 孙研,(Du Pengzhen, Tang Zhenmin, Sun Yan). 一种面向对象的多角色蚁群算法及其TSP问题求解(An object-oriented multi-role ant colony optimization algorithm for solving TSP problem)[J]. 控制与决策(Control and Decision), 2014, 29(10): 1729-1736. [14] 周方, 张小凤, 张光斌, 等(Zhou Fang, Zhang Xiaofeng, Zhang Guangbin, et al.). 蚁群算法中参数设置对超声回波估计性能的影响(The effects of parameters settings of ant colony algorithm on the performance of ultrasonic echo estimation)[J]. 中国科学: 信息科学(Scientia Sinica Informationis), 2013, 42(2): 243-253. [15] 邬琦, 潘广贞, 杨江涛(Wu Qi, Pan Guangzhen, Yang Jiangtao). 基于Voronoi图和动态自适应蚁群算法的UAV航迹规划(Route planning of UAV based on Voronoi diagram and dynamic and adaptive ant colony algorithm)[J].计算机测量与控制(Computer Measurement & Control), 2014, 22(9): 3037-3040. Ant colony algorithm strategy in pitch control for wind turbine DENG Ning-feng1, ZHOU La-wu1, CHEN Hao2, HAN Bing1, TIAN Meng1 (1. College of Electrical and Information Engineering, Hunan University, Changsha 410082, China; 2. Hunan Shiyou Electric Co. Ltd., Xiangtan 411100, China) The pitch control strategy has been widely used in the wind power constant control for variable-speed variable-pitch wind turbine above the rated wind speed. The range between rated wind speed to cut-out wind speed is too large and wind speed change rapidly, so that the power fluctuate frequently and traditional PID pitch controller is difficult to achieve a good result. In the paper, giving the pitch control strategy based on PID controller which parameters can be optimized by ant colony algorithm, this PID controller enables the wind power constant control of wind turbines has a better adaptability and robustness. The wind power constant control is analyzed at first, then PID parameter optimization methods by ant colony algorithm and it’s specific implementation steps are given, and a simulation and platform study is conducted. The final results proved the ACA-PID of wind turbine pitch control strategy has better dynamic performance, can effectively reduce the power fluctuations. wind turbine generator; pitch control; ant colony algorithm; wind power constant control 2015-09-10 国家国际科技合作专项(2011DFA62890) 邓宁峰(1992-), 男, 湖南籍, 硕士研究生, 研究方向为新能源发电技术; 周腊吾(1965-), 男, 湖南籍, 教授, 博士, 从事新型电机电器设计及控制、 新能源发电技术等研究。 TM614 A 1003-3076(2016)07-0069-06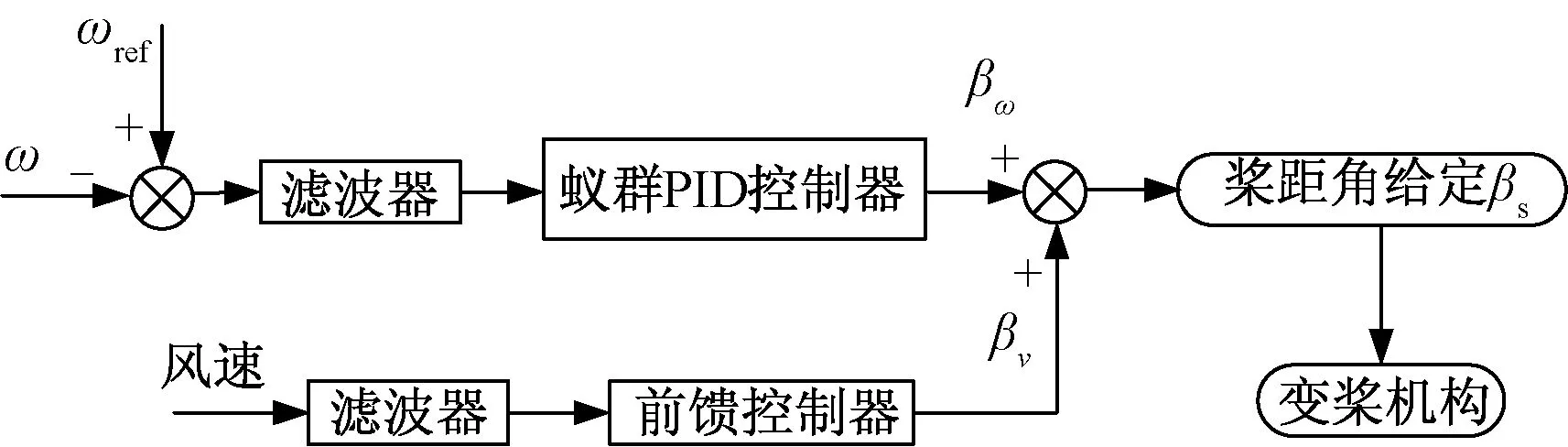
3 改进蚁群算法的PID变桨控制器



4 仿真研究

5 实验分析
6 结论