一种武术擂台赛机器人的漫游策略分析
2016-04-25司飙
司 飙
(滇西科技师范学院 信息科学与技术系,云南 临沧 677000)
一种武术擂台赛机器人的漫游策略分析
司飙
(滇西科技师范学院 信息科学与技术系,云南 临沧 677000)
摘要:多次测试实践表明,擂台机器人的漫游直接影响到后期的机器人对抗.通过对机器人漫游的测试和分析,提出漫游优化策略,为机器人对抗设计奠定基础.
关键词:擂台机器人;漫游;策略;环境探测;决策;测试反馈
0引言
近年来,机器人技术在国内各大高校大面积地推广和普及,主要体现在各类机器人竞赛上,而机器人武术擂台赛是一个常规比赛项目.各高校研究机器人以自主运动形式在擂台上竞技,体现了高校对机器人的设计能力,涵盖了结构设计、算法设计的能力[1].
1背景和意义
本文提出的擂台机器人漫游策略,是基于在擂台范围内的机器人漫游.擂台是一个有限的空间环境,把漫游的空间界定到有边界的范围内,缩小了机器人的探测环境,研究漫游策略是可行的.
漫游策略分为环境探测和执行机构两个部分.通过穷举擂台内可能出现的环境变量,确定机器人机构的执行动作,完成擂台上的漫游、避障、攻击等行为.本文提出一种漫游的优化,为机器人擂台竞技提供多样的竞技策略.
2问题抽象
本文研究对象为四轮差动式机器人模型,基于此模型的环境探测器件包括了红外光电传感器、红外测距传感器、灰度传感器;执行机构包括四轮舵机;控制器为avr单片机,提供8路的IO信号,8路的AD信号,8路的舵机信号;擂台环境为黑白渐变、高度为30 cm的平面擂台,以白色中心为圆心,扩散到黑色边缘的渐变规则,主要特点是便于灰度传感器的采样[2].
机器人模型中,把各类传感器信号作为数据输入量,把舵机转动作为数据输出量,以此构成完成的机器人漫游动作.红外光电传感器为数字输入量,取值为0和1.红外测距传感器为模拟输入量,根据光线反射强度取值,障碍越近,反射强度越强,取值越大;障碍物越远,反射强度越弱,取值越小.取值越大,说明机器人离障碍物越近,反之,离障碍物越远.灰度传感器为模拟输入量,根据光线对黑色反射量取值,黑色深度越深,反射强度越弱,取值小;黑色深度越浅,即为灰色或白色,反射强度大,取值大.取值小,说明机器人离擂台边缘近,反之,说明机器人靠近擂台中央.
舵机用于设计机器人轮式底座,是擂台漫游的执行机构,分为左侧和右侧两组,每组两个舵机,左右两侧以差动力实现转向.舵机取值决定转速,取值越大,转速越快,取值越小,转速越慢;取值为正,正向转速,取值为负,反向转速.
根据机器人机构设计,左侧舵机和右侧舵机为镜像关系,即若要实现前进动作,左侧舵机和右侧舵机取值是相反的.表1描述了舵机运动和取值的一般规律.
表1中,表述的差动转速轮式机器人舵机运动的一般规律,指的是当左右两侧速度取值相同的情况下,通过改变符号实现4个方向的运动.此外,当左右两侧速度不相同时,要考虑的运动规律就不能单纯地理解为一般规律,需要参考前一个动作轨迹确定当前的运动方案.
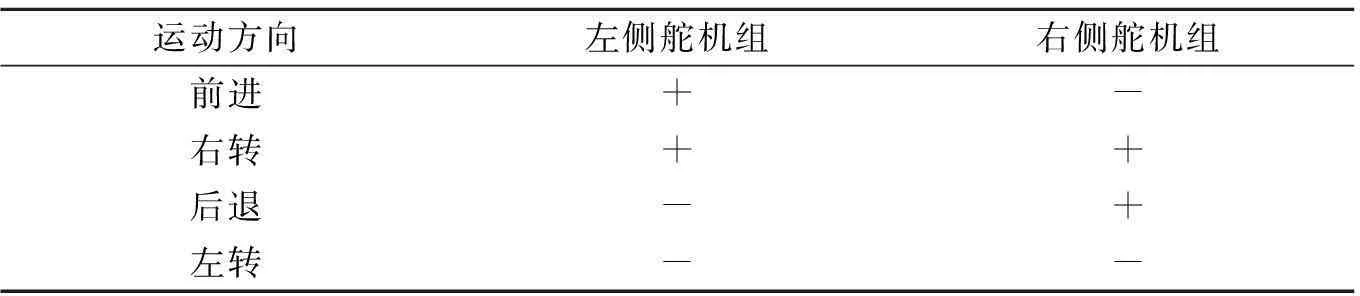
表1 舵机运动一般规律
注:前进运动以左侧舵机组取正值为基准;“+”代表取正值,“-”代表取负值.
3漫游策略
漫游策略的设计需要采集传感器的环境探测,分析当前机器人在擂台上的位置,然后为轮式舵机做出运动决策,保证机器人能够在擂台上漫游,而不会掉下擂台.
3.1环境探测设计
擂台环境探测主要采用各类传感器采集擂台的环境,为机器人漫游决策提供充足、准确的数据参考.环境探测分为边缘探测、障碍物(敌人)探测两类.本漫游策略重点研究的是边缘探测,对于障碍物探测不再赘述.
边缘探测使用红外光电传感器为主要探测器件,根据机器人设计的一般特性,可以在机器人形体结构上安放4个传感器[3],安放位置分别为左前方、右前方、左后方、右后方,如图1(a)所示.
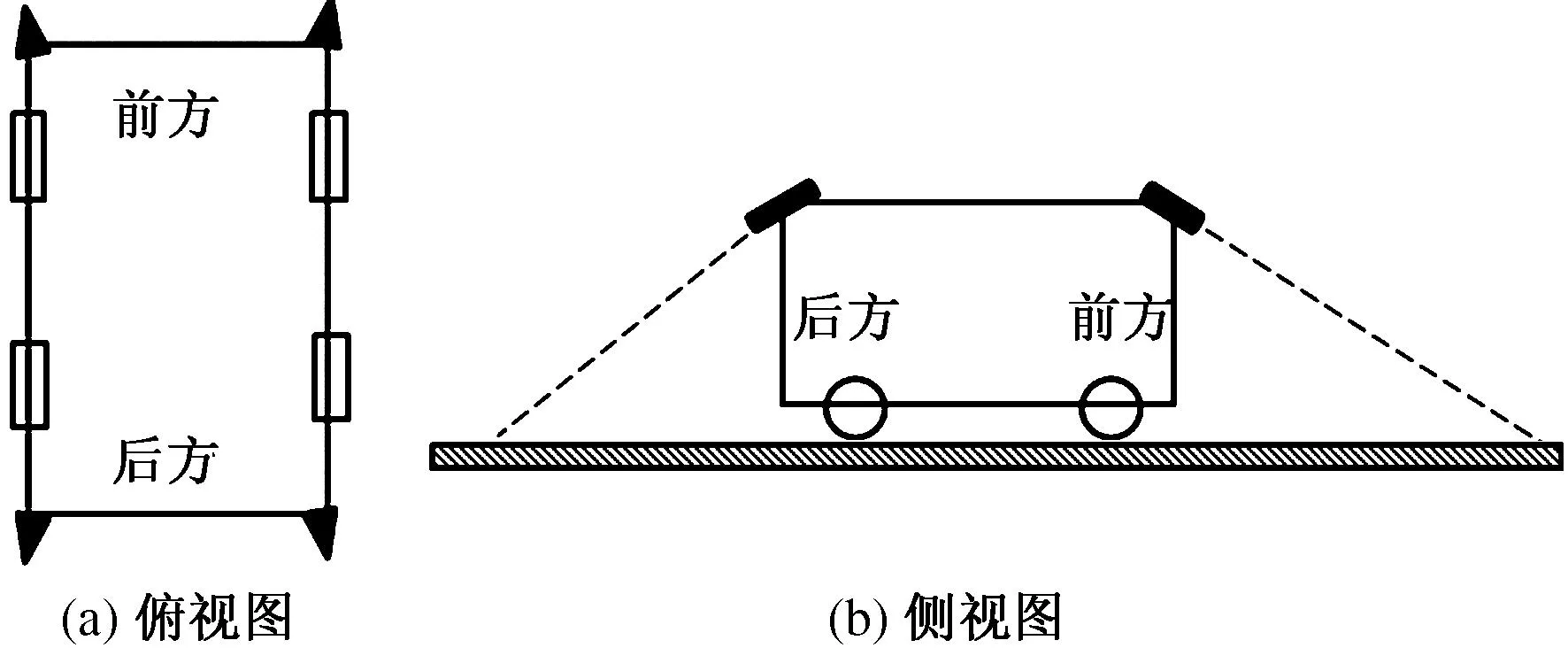
图1 轮式机器人的传感器抽象设计图 Fig.1 Sensor design of wheeled robot
图1(b)侧视图中,用虚线表示红外光电传感器射出的光束,此光束如果能探测到擂台平面,说明机器人处于擂台上;如果光束没有探测到擂台平面,说明机器人可能处于擂台的边缘,则需要采取相应的动作,避免掉下擂台.光束与擂台平面的夹角代表了机器人距离边缘的缓冲区,夹角越大,缓冲区越小,夹角越小,缓冲区越大.
3.2环境探测分析
设计中,在机器人上安放了4个传感器,理论上应该有24种探测到边缘的情况,但是排除一些无效的探测组合,实际上有效的探测边缘有8种情况,前方3种,后方3种,左侧1种,右侧1种.根据机器人漫游规律,在擂台上,机器人应该是以前进作为基本运动,那么探测前方边缘是频率较高的,所以前方探测边缘的3种情况是很重要的.而后方探测边缘可为特殊情况下的检验条件,例如死角情况下,需要联合前方和后方的探测情况进行决策.
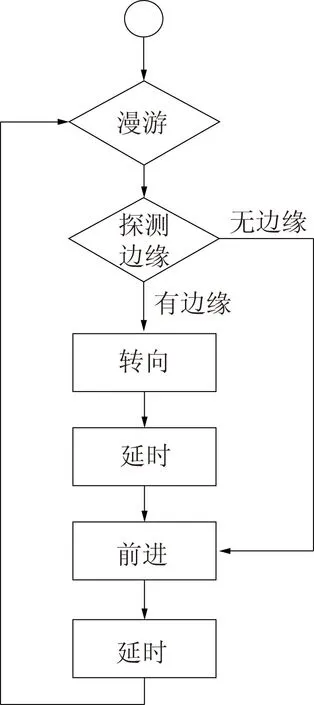
图2 漫游算法流程图 Fig.2 Flow chart of roaming algorithm
3.3决策与执行
决策与执行指的是探测到边缘后,机器人应该改变运动轨迹以保证在擂台上漫游.决策与执行的前提条件是机器人的漫游基本运动为前进,在前进中探测边缘情况,然后做出决策,并控制轮式舵机执行差动转向[4].具体决策与执行如下:
1)左前方探测到边缘:后退→右转→前进;
2)右前方探测到边缘:后退→左转→前进;
3)前方两侧同时探测到边缘:后退→掉头→前进.
3.4算法设计
漫游设计中,机器人总是在擂台上无休止地保持运动状态,所以算法应当设计一个死循环,让机器人保持运动,在死循环里探测边缘,调整运动轨迹,达到漫游的效果.算法流程如图2所示.
图2中,探测边缘模块,主要是调用底层函数,获取单片机上对应通道中的红外光电传感器数据,根据数据判断出探测边缘的情况;转向模块需要根据探测边缘的情况,做出转向决策;转向结束后,进入前进模块,前进模块控制轮式舵机向前滚动,前进模块结束后,进入下一个探测周期,完成漫游.需要说明的是,前进模块的延时短,则机器人的灵敏度高,反之灵敏度低;而转向模块的延时长短则取决于转向的角度,延时长,转向角度大,反之,转向角度小[5].
4测试反馈
根据漫游策略设计,构建轮式擂台机器人的形体结构,并编写机器人的执行程序.把设计好的机器人方案放到擂台上测试,观察机器人的运动轨迹.
经过多次测试分析,不难得出当机器人前进运动的速度和延时固定,转向的速度和延时固定,那么在不受外力干扰的情况下,机器人会在擂台上围绕一个相对稳定的轨迹进行漫游.另外,通过测试发现有些因素会影响到机器人漫游的稳定性,这些因素包括轮式舵机的稳固性和一致性、机器人的重量、转向的延时、电池的续航能力等.
5策略优化
根据测试反馈,有必要对漫游设计进行优化,让机器人漫游表现得更好,以便为后期的擂台对抗奠定基础.对漫游策略的优化分为硬件结构优化、运动逻辑优化和性能优化.
硬件结构优化,一是对轮式舵机的支架进行稳固和检查,保证轮式舵机安装稳固,并且要确保轮子安装在同一个水平线上,这样才能消除轮子之间的阻力;二是对前后轮的轴距进行测量,若轴距过短,则平衡性稍差,若轴距过长,则转向灵活性稍差,选择适当的轴距,需要做多次测试,反演推导来确定.
运动逻辑优化,是对机器人在擂台上漫游轨迹进行优化,若不受外力干扰,漫游的轨迹基本是稳定的,但也是由于这样的稳定,显得运动轨迹有些单一,为后期的擂台对抗留下隐患.通过多次测试可知,当左侧传感器检测边缘6次后,机器人右转向,基本能够围绕擂台走完一圈.优化时,可以设定一个计数器,计数左侧传感器检测到边缘的次数,当计数器达到6时,证明机器人已经走了一圈,此时再给出一个不一样的转向,从而改变了机器人的运动轨迹,使得漫游轨迹更多样化.
性能优化,一是考虑机器人的体重:体重轻,运动灵活,体重过重,显得笨重,但是为了后期的擂台对抗,过轻的体重也不利于对抗,各项综合,一般控制在3.5 kg~4.0 kg范围内;二是考虑电池的续航能力:电力弱时,常常表现为转向不足、运动缓慢,只有保持充足的电力,才能反映出准确的参数取值,所以,应该准备两块电池,随时替换.
6总结
漫游是擂台机器人设计的第一步,但是在设计时往往不受到重视,导致后期的对抗设计无法顺利完成,返工的案例比比皆是.本文通过多次测试实践,总结了影响漫游的因素,提出了漫游优化策略,为擂台机器人对抗设计奠定基础,提高设计的效率和稳定性.
参考文献
[1]李卫国.进攻型武术擂台机器人的研究与实践[J].机器人技术与应用,2009(4):41-43.
[2]张慧玲.擂台机器人的系统设计要点及分析[J].机电产品开发与创新,2012(5):34-36.
[3]孙旭日.武术擂台机器人的研究与实践[J].中国水运,2012(10):95-96.
[4]陈今天.关于擂台机器人的设计[J].科技论坛,2014(26):166.
[5]赵宝森.对抗机器人擂台定位设计[J].电子技术, 2015(4):95-97.
Analysis on Roaming Strategy in Contest Robot
SI Biao
(DepartmentofInformationScienceandTechnology,DianxiScienceandTechnologyNormalUniversity,Lincang677000,China)
Abstract:According to many tests, the roaming of robot directly affects the robot combat in last period. Through the test and analysis on robot roaming, the optimization of roaming strategy is put forward, which lays the foundation for the design of robot.
Key words:contest robot; roaming; strategy; environment detecting; strategic decision; test feedback
中图分类号:TP319
文献标志码:A
文章编号:1007-0834(2016)01-0013-03
doi:10.3969/j.issn.1007-0834.2016.01.004
作者简介:司飙(1982—),男,云南弥渡人,滇西科技师范学院信息科学与技术系讲师.
基金项目:云南省教育厅科学研究基金一般项目(2013y098)
收稿日期:2015-12-08