基于MEMS姿态传感器的声矢量传感器设计
2016-04-19笪良龙孙芹东王文龙
笪良龙,孙芹东,王文龙,王 超
(海军潜艇学院,青岛 266199)
基于MEMS姿态传感器的声矢量传感器设计
笪良龙,孙芹东,王文龙,王 超
(海军潜艇学院,青岛 266199)
针对声矢量传感器姿态变化难以准确测量导致目标测向精度低的现状,设计一种微型 MEMS姿态传感器,并将其封装在声矢量传感器内部,实现基于MEMS姿态传感器的声矢量传感器设计。首先根据声矢量传感器姿态测量与校正原理,采用四元数姿态解算方法及扩展卡尔曼滤波器设计MEMS姿态传感器,并对其进行姿态精度测试;然后基于MEMS姿态传感器进行声矢量传感器样机设计、制作、参数测试;最后对样机进行了海上实验,结果表明,通过姿态校正后声矢量传感器目标方位估计精度与GPS推算方位精度一致,验证了利用MEMS姿态传感器设计声矢量传感器的可行性。
声矢量传感器;MEMS姿态传感器;姿态校正;扩展卡尔曼滤波器
1 MEMS姿态传感器设计
1.1 姿态测量与校正原理
声矢量传感器姿态变化指的是其自身所在坐标系相对于参考坐标系的旋转角度变化。将声矢量传感器所在坐标系定义为载体坐标系,记为v系,坐标系原点位于声矢量传感器几何中心,三个坐标轴xv、yv、zv分别指向声矢量传感器的右、前、上方向;将声矢量传感器目标定向的最终结果所对应的坐标系定义为参考坐标系,记为n系,三个坐标轴xn、yn、zn分别指向声矢量传感器所在地的东、北、天方向。
声矢量传感器所在载体坐标系相对于参考坐标系的角度可以用α、β、γ表示,分别称为航向角、俯仰角、横滚角,三个姿态角可以通过将参考坐标系绕不同坐标轴的3次连续旋转得到。如图1所示,绕zn轴旋转oxnyn面可以得到航向角α,绕x1轴旋转oy1z1可以得到俯仰角β,绕y2轴将平面ox2z2旋转可以得到横滚角γ。
若(xv,yv,zv)为未姿态校正前声矢量传感器在载体坐标系下的坐标值,(xn,yn,zn)为姿态校正后声矢量传感器在地里坐标系下的坐标值,由以上两坐标系的角度关系,若已知姿态角度为(α,β,γ),则可以由姿态转换矩阵得到两坐标值的映射关系为

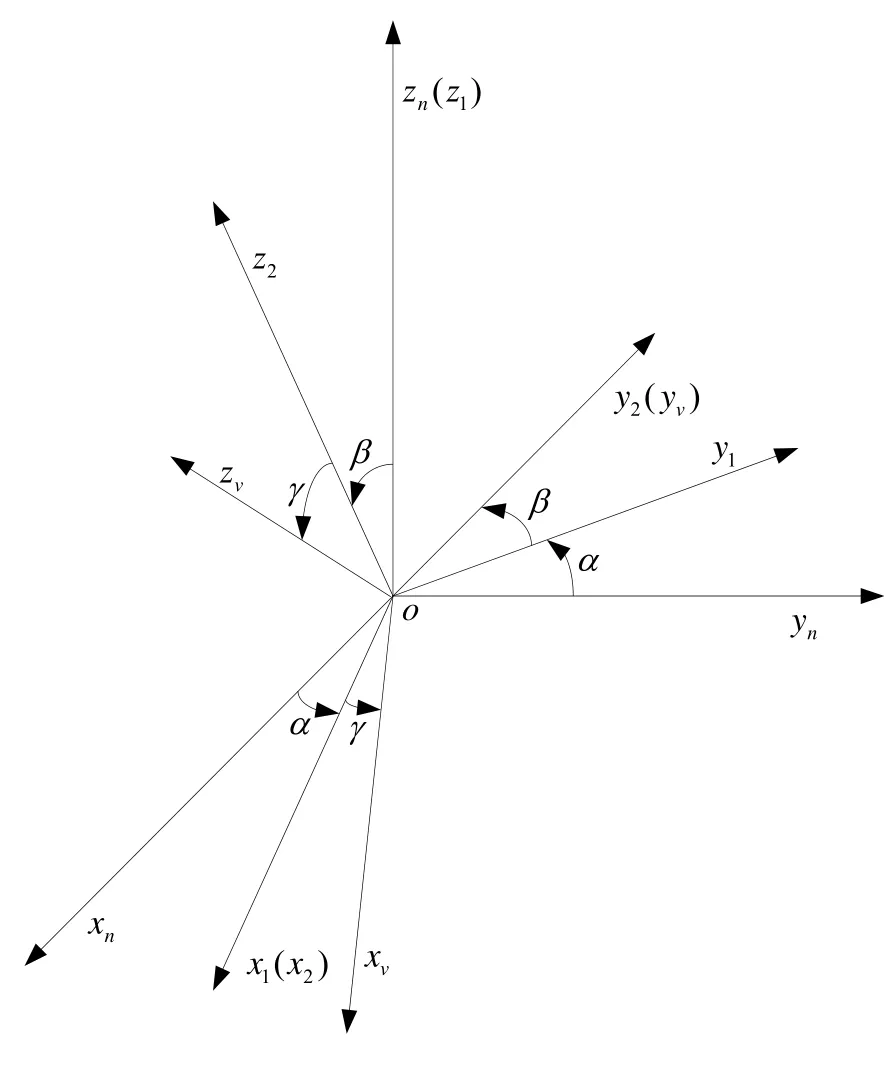
图1 坐标系旋转关系Fig.1 Relationship of coordinate rotation

1.2 四元数姿态解算方法
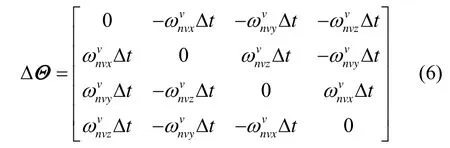
声矢量传感器工作时用柔性元件悬挂于大质量框架内,受复杂海洋环境的影响,在水中声波作用下,其运动可以看作随质心的线运动和随质心转动的合成。其中,随质心的转动会产生载体坐标系相对参考坐标系的姿态变化,姿态更新方程可表示为[9-10]




1.3 扩展卡尔曼滤波器
考虑到姿态传感器所采用的 MEMS陀螺仪精度较低,随时间积累姿态测量误差会迅速放大,因此引入加速度计(检测重力加速度方向)和磁力计(检测地球磁场方向)来对解算出来的姿态进行实时校正。当矢量水听器的运动加速度较小,相对于重力加速度可以忽略时,可认为重力加速度方向垂直于水平面向下。重力方向和磁北方向正交,从而可以唯一确定一个三维姿态。将其作为校准源,用扩展卡尔曼滤波器(EFK)对陀螺仪测得的角速度积分出来的姿态不断地进行最优估计,防止其出现积分漂移。
扩展卡尔曼滤波器的工作流程分为两大步[10]:预测更新和校正更新。预测更新分为两步:首先应用陀螺仪测量角速度,根据当前角速度计算状态矩阵,以此来估计状态变量;然后应用过程激励噪声协方差矩阵来估计当前协方差矩阵,从而完成预测更新。校正更新分为三步:首先是根据上文更新的协方差矩阵和当前观测矩阵、测量噪声协方差来计算当前卡尔曼增益;然后由加速度计、磁力计测量观测变量,并应用观测变量与卡尔曼增益来校正预测更新中的估计状态变量;最后是更新误差协方差矩阵,以供下次预测更新使用。
1.4 系统实现及参数测试
设计的 MEMS姿态测量系统采用了数字式三轴MEMS陀螺仪、三轴MEMS加速度计以及三轴MEMS磁力计作为传感器(传感器参数见表1),分别用来测量声矢量传感器的角速度、加速度以及环境磁场强度,以 ARM-Cortex内核高性能单片机作为处理运算平台,用于完成控制、数据采集及姿态解算等功作。测试表明,系统能够以最高 540 Hz的速度进行姿态解算,并可通过RS232串口总线以20 Hz或更高的速率输出姿态欧拉角至上位机软件。制作完成的 MEMS姿态传感器如图2所示[10]。
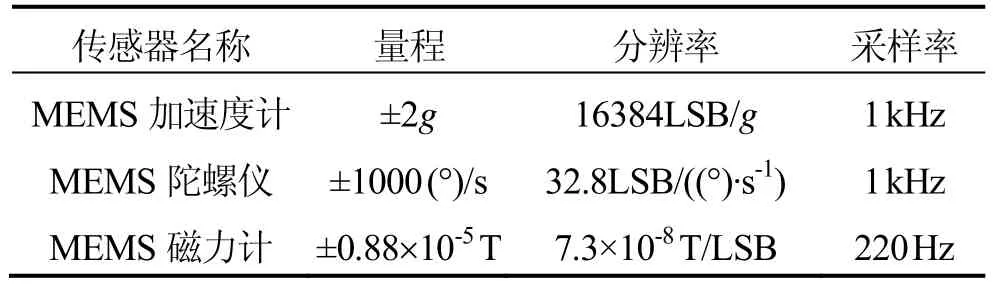
表1 传感器参数Tab.1 Experiments of sensor

图2 MEMS姿态传感器Fig.2 MEMS attitude sensor
MEMS姿态传感的性能参数测试工作在国防科技工业第一计量测试研究中心完成,测试项目包括航向角俯仰角及横滚角静态和动态精度测试,这里只给出俯仰角静态和动态测试结果[10],如表2、表3所示。

表2 俯仰角静态精度测试结果Tab.2 Test results of pitch’s static accuracy

表3 俯仰角动态精度测试结果Tab.3 Test results of pitch’s dynamic accuracy
由测试结果可知:MEMS姿态传感器俯仰角静态误差最大值为0.1°;在激励源振幅20°以内以及频率2 Hz以内,俯仰角最大动态误差小于0.4°,相对误差为振幅的2.9%以内,满足声矢量传感器姿态测量应用要求。
2 声矢量传感器研制与测试
2.1 声矢量传感器设计原理
将能够自由运动刚硬柱体放置于水下声场中,当满足刚硬柱体为中性浮力以及最大线性尺寸远小于声波波长条件时,刚硬柱体的运动状态会与未放入声场中时其等效声中心所在处水质点做等幅、同相振动[11]。如果在刚硬柱体内放置能拾取振动信息的传感器,就可以获取其振动信息,从而得到水下声场中质点振速信息。用公式表达为,若

则满足:

本文所设计的基于 MEMS姿态传感器的声矢量传感器内部拾取振动信息的传感器为三轴向压电加速度传感器,三轴向压电加速度传感器确定的坐标系为声矢量传感器载体坐标系,MEMS姿态传感器确定的坐标系为参考坐标系。在设计时将三轴向压电加速度加速度传感器和姿态传感器作为一个整体进行考虑,载体坐标系三个坐标轴xv、yv、zv和参考坐标系三个坐标轴xn、yn、zn按顺序重合,且该整体几何中心和声矢量传感器几何中心重合。
2.2 声矢量传感器制作
在声矢量传感器制作中,矢量通道采用订制三轴向压电加速度传感器,工作频带为10~1000 Hz,灵敏度为2850 mV/g,按定义的坐标系将三轴向压电加速度传感器和MEMS姿态传感器粘接在一起,置于声矢量传感器几何中心处,声压通道采用∅44 mm×50.8 mm×8 mm的PZT-5型径向极化压电陶瓷圆管。
在制作时要将姿态传感器三个坐标轴和三轴加速度传感器三个坐标轴按顺序重合并用刚性框架进行固定。为了将声通道和矢量通道在结构上复合为一体,在封装过程中分模块化分别完成三轴向加速度传感器和MEMS姿态传感器的封装、声压通道封装、半球帽封装,内部填充玻璃微珠和环氧树脂低密度复合材料,以便降低声矢量传感器整体密度。制作完成后声矢量传感器体积为∅60 mm×78 mm,平均密度
2.3 声矢量传感器测试
声矢量传感器测试性能参数包括各通道接收灵敏度、指向性。在保证入射到两只传感器上的声波是平面波的前提下,声矢量传感器直接和标准声压水听器作比较法来测量各通道接收灵敏度。由于实验室环境无法有效得到低频自由场,而驻波管可以通过在一端开口且充满校准媒质的厚壁不锈钢管底部安装发射换能器的方式在圆形垂直管中产生平面驻波场,因此,声矢量传感器低频灵敏度测量通常在驻波管中进行,其测量公式为[12]
式中:Mp、ep、hp分别为待声矢量测传感器自由场声压灵敏度、开路电压、驻波管中入水深度,M0、e0、h0分别为标准水听器自由场声压灵敏度、开路电压、驻波管中入水深度,j代表声压和振速间存在 90°相位差,ω为测量角频率,g为重力加速度。
在固定频率、发射器发射功率恒定的情况下,通过回转装置控制仪控制回转装置使被测矢量水听器旋转一周,同时记录在不同角度时开路输出电压值,并对输出电压值做归一化处理用对数形式表示。
声矢量传感器测试结果如图3所示。灵敏度在测量时以声压量为参考,参考基准为 1 μPa。如图 3(a)所示,矢量通道声压灵敏度按每倍频程6 dB的方式增加,灵敏度级为-185.4 dB(500 Hz,0 dB=1 V/μPa),声压灵敏度基本为平坦曲线,灵敏度级为-193.5 dB(0 dB=1 V/μPa);如图3(b)所示,在630 Hz频点处矢量通道具有余弦指向性,指向性分辨力均达到30 dB以上,主轴方向最大灵敏度和垂直主轴方向横向灵敏度偏差都小于2 dB,声压通道具有全指向性。

图3 声矢量传感器测试结果Fig.3 Experimental results of acoustic vector sensor
3 海上试验
2014年在青岛某海域进行了封装有MEMS姿态传感器的声矢量传感器目标方位估计实验,当地海深55 m。海试时,声矢量传感器用弹性元件悬挂在刚性支架上,刚性支架吊放在接收舰舷侧10 m水深处,声源吊放在发射舰舷侧10 m水深处,两舰相距8.2 km,发射舰相对接收舰的GPS推算方位角为285°,声源信号为600~900线性调频信号。
图4为应用声矢量传感器对目标方位进行估计的直方图统计结果,包括应用GPS信息推算舰位、姿态校正前的目标方位,姿态校正后的目标方位。可以看出,声矢量传感器未进行姿态校正前目标方位值与GPS信息推算值极不相符,这是因为声矢量传感器所在载体坐标系受海流等复杂海洋环境影响,其姿态在不断变化,所测目标方位为载体坐标系下目标方位;姿态校正后,在 LFM调频信号发射的时间段内,所测目标方位值收敛到推算值附近,不随声矢量传感器姿态变化而变化。
4 结 论
为解决声矢量传感器姿态测量不准确导致目标测向精度低的难题,设计、制作了基于MEMS姿态传感器的声矢量传感器样机。MEMS姿态传感器静态、动态测试结果表明,其精度能满足声矢量传感器测量需要,声矢量传感器各通道指向性、灵敏度性能参数符合设计要求。海上实验结果表明,姿态校正后,声矢量传感器样机目标方位估计值和 GPS信息推算值吻合较好。采用MEMS姿态传感器设计的声矢量传感器可有效提高目标测向精度,在水下晃动声纳平台具有较广阔的应用前景。

图4 LFM信号方位角估计直方图统计结果Fig.4 Histogram statistics result of DOA estimation of the LFM signal
(References):
[1] 周宏坤, 洪连进. 基于MEMS电容加速度计的声矢量传感器设计[J]. 中国惯性技术学报, 2015, 23(2): 270-274. Zhou Hong-kun, Hong Lian-jin. Miniaturization design of an acoustic vector sensor based on MEMS capacitive accelerometer[J]. Journal of Chinese Inertial Technology, 2015, 23(2): 270-274.
[2] Sun Qin-dong, Sun Xiang-jie. Design and manufacture of combined co-vibrating vector hydrophones[C]// Proceeding of the 2014 Symposium on Piezoelectricity, Acoustic Waves and Device Applications. Beijing, China, 2014: 186-189.
[3] Barnard A R, Hambric S A. Design and implementation of a shielded underwater vector sensor for laboratory environments[J]. Journal of the Acoustical Society of America, 2011, 130(6): 387-391.
[4] 洪连进, 杨德森, 时胜国, 等. 中频三轴向矢量水听器的研究[J]. 振动与冲击, 2011, 30(3): 79-84. Hong Lian-jin, Yang De-sen, Shi Sheng-guo, et al. Study on a medium three dimensional co-oscillating vector hydrophone[J]. Journal of Vibration and Shock, 2011, 30(3): 79-84.
[5] Thode A, Skinner J, Scott P, et al. Tracking sperm whales with a towed acoustic vector sensor[J]. Journal of the Acoustical Society of America, 2010, 128(5): 2681-2694.
[6] Sigray P, Andersson M H. Particle motion measured at an operational wind turbine in relation to hearing sensitivity in fish[J]. Journal of the Acoustical Society of America, 2011, 130(1): 200-207.
[7] Bree H D, Wind J W. The acoustic vector sensor: A versatile battlefiled acoustics sensor[C]//Proceeding of SPIE 8047: Ground/Air Multisensor Interoperability, Integration, and Net-working for Persistent ISRⅡ. Orlando, Florida, USA, 2011: 1-8.
[8] 牛嗣亮, 张振宇, 胡永明, 等. 单矢量水听器的姿态修正测向问题探讨[J]. 国防科技大学学报, 2011, 33(6): 105-110. Niu Si-liang, Zhang Zhen-yu, Hu Yong-ming, et al. Direction of arrival estimation from a single vector hydrophone with attitude correction[J]. Journal of National University of Defense Technology, 2011, 33(6): 105-110.
[9] 陈宇中. 开环光纤陀螺性能改进及其在光纤矢量水听器姿态测量上的应用研究[D]. 国防科学技术大学博士学位论文, 2011. Chen Yu-zhong. Research on Performance Improvement of open-loop fiber-optic gyroscope and its application in attitude measurement of fiber-optic vector hydrophone [D]. Changsha: National University of Defense Technology, 2011.
[10] 王文龙. 单矢量水听器目标方位估计研究[D]. 青岛:海军潜艇学院, 2015. Wang Wen-long. Attitude measurement and DOA estimation of vector hydrophone[D]. Qingdao: Navy Submarine Academy, 2015.
[11] McConnell J A. Analysis of a compliantly suspended acoustic velocity sensor[J]. Journal of the Acoustical Society of America, 2003, 113(3): 1395-1405.
[12] 范继祥. 矢量水听器校准装置研究[D]. 哈尔滨: 哈尔滨工程大学, 2007. Fan Ji-xiang. Research of vector hydrophone calibration device[D]. Harbin: Harbin Engineering University, 2007.
Design of acoustic vector sensor based on MEMS attitude sensor
DA Liang-long, SUN Qin-dong, WANG Wen-long, WANG Chao
(Navy Submarine Academy, Qingdao 266199, China)
In view that the attitude change of acoustic vector sensor is difficult to accurately measure, resulting in low accuracy of target direction finding, a miniature MEMS attitude sensor is designed and encapsulated inside the acoustic vector sensors to achieve the acoustic vector sensor design based on MEMS attitude sensor. At first, based on the principle of acoustic vector sensor attitude measurement and correction, an MEMS attitude sensor is designed by using quaternion attitude algorithm & extended Kalman filter, and then its attitude accuracy test is made. After that, the acoustic vector sensor prototype is designed and produced based on the MEMS attitude sensor, and its parameter testing is made. Finally, the prototype is tested at sea. Test results show that, after the attitude correcting, the DOA estimation accuracy of the acoustic vector sensor is in agreement with the GPS accuracy of the estimated heading, verifying the feasibility of the attitude acoustic vector sensor designed by the MEMS sensor.
acoustic vector sensor; MEMS attitude sensor; attitude correction; extended Kalman filter
TB565+.1
:A
1005-6734(2016)04-0531-06
10.13695/j.cnki.12-1222/o3.2016.04.019系统不能准确测量每个阵元的姿态,且各阵元姿态不完全一致。声矢量传感器姿态测量难题在一定程度上限制了其工程应用,能否准确获取声矢量传感器实时姿态,是其走向工程应用的关键。因此,本文从声矢量传感器实际工程应用出发,设计一种微型 MEMS姿态传感器,并将其应用于声矢量传感器设计,通过海上实验验证该方法的可行性。
2016-04-03;
:2016-07-28
国家自然科学基金项目(61203271)
笪良龙(1967—),男,教授,博士生导师,从事海军作战环境、水声环境效应研究。E-mail: wilon7521@qq.com
复合同振式声矢量传感器可以空间共点、时间同步测量水下声场中的质点振速(或加速度、位移、声压梯度)矢量信息和声压标量信息[1],有较高的准确性和可靠性,具有小体积、高指向性、高灵敏度、抗各向同性噪声干扰等优点[2-4],单个声矢量传感器即可实现水中目标测向,能有效解决传统声压单线阵左右舷模糊问题,在海洋资源勘探、生物调查、岸港防御、水声警戒网络构建等领域有着重要应用[5-7]。
然而声矢量传感器应用在声纳浮标、警戒潜标、航空吊放声纳等水下晃动声纳平台上时,由于受复杂海洋环境中内波、潮汐、大洋环流等影响[8-9],声矢量传感器及其声纳平台存在姿态变化,声纳平台上声矢量传感器探测的目标方位是相对于自身载体坐标系的方位信息,为得到目标的准确方位信息还需测量声矢量传感器相对于地理坐标系的实时姿态信息。工程上为获取声矢量传感器实时姿态信息,通常在声纳平台上按几何规则捷联安装电子罗盘或其他姿态测量系统,这种方式存在以下弊端:一是声矢量传感器为柔性悬挂,姿态测量系统无法准确测量声矢量传感器姿态变化;二是由于存在安装误差,姿态测量系统和声矢量传感器坐标系不能绝对重合,且安装误差角不能准确测量;三是声矢量传感器在阵列应用时姿态测量
