人控遥操作交会对接设计与验证*
2016-04-14刘宗玉胡海霞刘增波周远林
刘宗玉,胡海霞,刘增波,王 敏,周远林
(北京控制工程研究所,北京100190)
人控遥操作交会对接设计与验证*
刘宗玉,胡海霞,刘增波,王 敏,周远林
(北京控制工程研究所,北京100190)
人控操作交会对接是指操作人员在远端通过遥操作方式控制追踪航天器进行交会对接,主要用于无人航天器自动交会对接系统故障条件下交会对接控制.简要介绍遥操作交会对接的基本概念,给出实现人控遥操作交会对接三种方案,设计一种易于工程实现的遥操作交会对接系统,分析关键技术并给出了解决方法;根据设计的系统方案,进行遥操作交会对接试验,试验结果表明设计方案合理可行.
人控遥操作交会对接;关键技术;时延;图像压缩
0 引 言
在载人航天器上,航天员可以直接参与航天器的控制,手动交会对接可以作为主要的交会对接方式,也可作为自动交会对接的备份.但是无人航天器,如货运飞船、空间站实验舱等,由于航天器上没有航天员,无法实现载人航天器的手动交会对接.无人航天器一般采用自动交会对接作为主要方式,若自动交会对接系统出现故障,不得不放弃整个交会对接任务,这将造成巨大的经济损失和社会影响,甚至个别情况下还将威胁到空间站的安全,因此由航天员或地面人员进行远程控制交会对接,即人控遥操作交会对接,作为自动交会对接系统的备份具有重要的工程实践价值、经济效益和社会意义.
国际空间站每年都要进行多次交会对接,用于乘员轮换和后勤补给等.其中“进步”号飞船24次交会对接中出现故障4次[2],3次故障通过TORU (teleoperator rezhim upravleniya)遥操作交会对接系统成功实现对接,1次自动系统故障,两天后经过第2次交会对接尝试实现交会对接.这说明当前航天器上的自动交会对接系统并不是十分完善.人控遥操作交会对接不仅可以作为自动交会对接系统的备份,解决无人航天器自动交会对接系统出现故障和安全性问题,而且通过融入人的判断与决策能力等智能因素,提高对接的成功率、减少燃料消耗和功能的拓展.
1 人控遥操作交会对接系统设计
人控遥操作交会对接是指操作人员在远端(或不在控制飞行器环境内)通过遥操作方式操作追踪航天器,实现交会对接.美国主要采用手动方式交会对接,俄罗斯主要采用自动方式.美国曾于上世纪80年代OMV(orbital maneuvering vehicle)项目中开展过相关技术的基础研究,俄罗斯的TORU遥操作交会对接系统已成功应用于和平号(Mir)空间站和国际空间站的交会对接任务,特别是无人货运飞船与空间站的交会对接,已成功解决多次无人航天器自动系统故障下的交会对接问题.
目前航天器实现人控遥操作交会对接主要有三种方式:第一种是目标航天器(空间站)上的航天员对追踪航天器进行交会对接遥操作控制,遥操作摄像机和交会对接灯安装在目标航天器,摄像机的十字靶标安装在追踪器上,这样控制系统时延最小,实时性最好.但是这种方案在阳照区交会对接时遥操作摄像机要求太阳不能直射,在阴影区交会对接时目标航天器端的交会对接灯开启会对追踪航天器端的其它交会对接敏感器产生干扰,限制了交会对接窗口.另外,目标航天器上除安装遥操作摄像机、交会对接灯外,同样须安装摄像机的十字靶标,以满足载人航天器的手控交会对接需要.如果将遥操作摄像机安装在空间站,航天员人控遥操作交会对接方式与载人航天器手控操作方式存在差异,不利于航天员训练和对接操作具体实施.
第二种是目标航天器(空间站)上的航天员对追踪航天器进行交会对接遥操作控制,但是遥操作摄像机和交会对接灯安装在追踪航天器上,与载人航天器手动交会对接方式一样,可以充分继承载人航天器手控交会对接技术,解决交会对接光照条件、长寿命要求、设备配置和航天员操作习惯问题,但会新引入图像压缩、空空链路等环节时延,这个环节时延一般会增加几百毫秒.
第三种是地面操作人员对追踪航天器进行交会对接遥操作控制.遥操作摄像机和交会对接灯一般安装在追踪航天器上,由地面控制中心根据下行的交会对接图像控制追踪航天器逐步逼近目标航天器,此方案可应用于目标航天器无人驻守期间.但是,这种方案需要经过天地大回路,系统时延过大,一般时延达到5~7 s,这会引起控制稳定性和遥操作交会对接的安全性问题.
综合考虑控制回路时延、航天员操作习惯、安全性等因素,人控遥操作交会对接采用第二种方案更具有工程可实现性.这种人控遥操作交会对接系统原理如图1所示,系统由测量部件、操作部件、控制器、执行部件以及遥操作通信机组成,测量部件主要包括:遥操作摄像机、靶标、激光雷达、姿态位置敏感器、显示仪表等;操作部件有仪表控制面板、姿态控制手柄和平移控制手柄;控制器是遥操作控制计算机;执行部件是与自动控制系统共用的推进系统.
第一步,按每条测线导出通过专业软件例如RADAN7进行数据处理与人机交互解释后得到的每个翻浆冒泥病害区域底界离散的边界控制点的集合信息,生成按测线排列的铁路线路翻浆冒泥病害区域底界坐标控制点数据文件即离散的边界控制点的Excel报表。
航天员在目标航天器上,遥操作摄像机安装在追踪航天器上,靶标安装在目标航天器上,通过遥操作空空通信链路将相对运动图像和追踪航天器的相对距离、速度、姿态等数据传输到目标航天器仪表上显示.在人控遥操作模式下,遥操作摄像机以每秒25帧以上频率拍摄图像,并将图像进行压缩处理,与遥操作控制器产生的显示数据进行复接,由空空通信链路传至目标航天器数据处理设备,数据处理设备提取显示数据和解压图像并进行显示.
航天员根据显示屏上的遥操作对接图像和数据,操纵控制手柄,经过遥操作通信机再传至追踪航天器遥操作控制器,遥操作控制器根据收到的遥操作控制指令进行控制率计算,并形成推进指令,控制追踪航天器的姿态或轨道,来完成人控遥操作交会对接、撤离和故障情况下的紧急撤离.

图1 人控遥操作交会对接原理示意图Fig.1 Manual teleoperation rendezvous and docking system principium diagram
2 人控遥操作交会对接关键技术
控制技术是人控遥操作交会对接的核心技术,包括轨道运动控制和姿态运动控制两部分.相对于载人航天器的手控交会对接,人控遥操作交会对接需要解决大时延下的控制算法,图像数据、指令参数传输链路时延的控制以及图像压缩、恢复等关键技术,以确保人控遥操作交会对接的安全.
2.1 遥操作交会对接控制方法研究
人控遥操作交会对接的图像反馈信息和遥操作指令是通过空空通信链路进行传输,会产生通信时延,甚至存在通信链路异常或中断的可能,时延的加大会造成控制系统的不稳定性,通信异常甚至会引起交会对接安全性问题.
针对大时延易引起控制系统不稳定问题,国内外学者提出了多种解决方法[4-9],在遥操作机器人、在轨服务遥操作等领域已经开始应用,克服时延的理论和方法主要方法有以下几类:
(1)“移动-等待”操作策略.这是最早采用的方法,用来克服在操作过程中引起的系统不稳定.“移动-等待”操作策略在每进行一步操作后,停止操作,等待操作指令执行后的状态反馈,根据该反馈再进行下一步的操作.这种方法是一种断续工作模式,实际上是以降低系统的工作带宽为代价的,其结果不仅造成了反馈信息的模糊性,而且给操作者带来了很重的负担,使操作者很快疲劳,适合于低动态、时延问题不突出的应用场合.
(2)双边控制方法.双边控制是指本地操作端和远端执行端处于同一个闭环控制回路,两者之间直接相互作用,通过设计控制算法和合适的参数克服通信时延的影响.双边控制方法目前主要包括:基于电路网络理论的无源控制法,如1989年Anderson和SPong利用二端口网络的散射理论散射理论[7],Niemeyer和 Slotine在 1991年提出波变量理论法[8];基于Lyapunov稳定性判据的方法[9];基于H∞最优控制理论的方法;基于自适应智能控制理论的方法等.双边控制是遥操作交会对接性能提高的重要措施,但是双边控制技术无论是理论上还是工程上还有待突破大时延的限制.
(3)预测控制方法.预测控制方法是通过建立远端系统和环境的数学模型,包括动力学与运动学模型、环境相互作用模型等,对远端的运动状态进行预测,在预测运动状态的基础上进行控制,如应用虚拟现实技术和增强现实方法,对运动状态进行预显示,克服时延对控制的影响.预测控制需要系统准确的模型和较大的计算量来构建交会对接显示图像,对现实运动状态和场景进行预显示和误差校正.
以上遥操作时延解决方法是针对空间机器人、在轨服务遥操作[5]等设计和研究的,这些方法也适用于人控遥操作交会对接任务.在这三类控制方法中预测控制是克服时延能力最强,但是实现技术难度最大;双边控制是基于控制理论来解决遥操作时延问题,对时延适中(一般1 s以下)的系统具有较好的效果,工程可实现性强.因此双边控制方法更适合于人控遥操作交会对接.
人控遥操作交会对接一般作用距离不大于200 m,航天员利用遥操作摄像机观察得到的目标飞行器和靶标的图像来判断和确定两个飞行器之间的相对运动状态和参数,操纵平移和姿态控制手柄控制追踪飞行器的平移和姿态运动,使追踪飞行器满足对接条件.人控遥操作交会对接采用双边控制方法,姿态控制根据姿态测量信息,针对大时延对控制参数进行优化设计;根据靶标上伸出的十字架相对于靶标背景圆盘上的十字刻线之间的偏差,控制追踪飞行器与目标飞行器的相对位置.
2.2 系统时延分析与控制
影响人控遥操作交会对接成功率的关键因素之一是控制系统的时延环节.人控遥操作交会对接时延环节如图2所示,包括前向信息通道时延和返向信息通道时延.前向信息通道时延是指遥操作摄像机从拍摄图像至图像显示过程各环节引入的时延,主要包括遥操作摄像机拍摄一帧图像光学积分时间、图像缓存与压缩处理时间、空空通信数据传输数据的时延、图像解压处理时间和图像更新显示时间.返向信息通道为控制手柄数据采集至控制器完成手柄指令信息处理全过程各环节的时延,主要包括手柄电压采集、控制指令通信传输时延、遥操作控制器计算以及推进执行时延等.

图2 人控遥操作交会对接时延环节Fig.2 Manual teleoperation rendezvous and docking time-delay part
在人控遥操作信息链路中,主闭环回路为航天员操作手柄发出控制指令——控制器根据手柄信息发出推进指令——遥操作摄像机拍摄并传送至目标飞行器显示交会对接图像,该控制回路的性能受时延影响最大,是进行分析和控制的重点.另外,人控遥操作还涉及航天员发送离散控制指令和遥测数据传输、遥测图像下行等信息链路,但这些内容对时延较不敏感.
2.3 图像压缩及恢复技术
人控遥操作传输信息包括交会对接图像数据、相对测量数据以及航天员操作控制指令,双向传输数据量一般高达300 Mbps以上.交会对接视频图像是遥操作空空通信的主要数据源,通过对图像的压缩处理,可以降低遥操作通信设备带宽的需求,减少传输时延,通过纠错算法还可以提高数据传输的可靠性.
国际上视频编码压缩技术主要有国际电信联盟ITU-T的H.26x系列、国际化标准组织ISO/IEC的MPEG标准、Real公司的RM和RMVB、Microsoft公司的VC-1(WMV9)和RMVB以及On2的VP系列等.但技术实现方面,现有的视频压缩编码采用的技术框架基本一致,区别仅在于技术细节实现的方式及模式不同.通用的的视频压缩算法都采用混合压缩的方法,即对视频序列做时域、空域和码字的级联压缩.时域压缩用于去除连续视频帧之间的冗余,空域压缩用于去除视频帧内相邻数据之间的冗余,码字压缩用于去除码字冗余.
人控遥操作交会对接采用标准的压缩算法,经过压缩处理后遥操作通信机传输的数据量小于8 Mbps,并保证高清晰度的图像.
3 人控遥操作交会对接验证
针对设计的遥操作交会对接系统和关键技术,研制相应的遥操作交会对接设备,构成人控遥操作系统,进行试验验证.试验设置交会对接初始的相对位置、相对速度和相对姿态角、相对姿态角速度,进行多次遥操作交会对接试验,验证系统设计和关键技术,其中典型的试验结果如图3、图4所示.试验结果表明,人控遥操作交会对接系统设计合理可行,遥操作增加的时延对操作者的控制结果精度影响在允许范围之内,满足对接条件.

图3 人控遥操作交会对接试验位置曲线Fig.3 Manual teleoperation rendezvous and docking test position graph
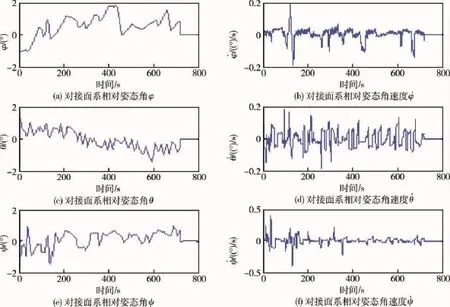
图4 人控遥操作交会对接试验姿态曲线Fig.4 Manual teleoperation rendezvous and docking test attitude graph
4 结 论
根据以上的系统设计和试验分析,可知:
(1)提出的人控遥操作交会对接系统设计方案具有较好工程可实现性,可以作为无人航天器自主交会对接的备份.
(2)分析了遥操作交会对接实现过程中的关键技术,并给出了解决方法.
(3)遥操作交会对接技术可广泛应用于合作目标和非合作目标的空间交会与捕获等空间操作任务中,具有重要的工程应用价值和潜在的军事价值,未来具有广阔的应用前景.
[1]唐国金,罗亚中,张进.空间交会对接任务规划[M].北京:科学出版社,2007,204.
[2]唐国金,周剑勇,张波,等.遥操作交会对接技术综述[J].载人航天,2011,17(2):37-43.TANG G J,ZHOU J Y,ZHANG B,et al.A survey of teleoperator rendezvous and docking technology[J].Manned Spaceflight,2011,17(2):37-43.
[3]周剑勇,张波,蒋自成,等.遥操作交会对接系统研究[J].国防科技大学学报,2012,34(3):24-27.ZHOU J Y,ZHANG B,JIANG Z C,et al.Research on teleoperation rendezvous and docking system[J].Journal of National University of Defense Technology,2012,34(3):24-27.
[4]曾庆军,宋爱国,黄惟一.时延下空间遥操作机器人系统工作模式研究[J].宇航学报,2003,24(2):181-185.ZENG Q J,SONG A G,HUANG W Y.Research on operation mode of space teleportation rabot with time delay[J].Journal of Astronautics,2003,24(2):181-185.
[5]孙富春,吴凤鸽,刘华平.面向在轨服务遥操作技术的研究与展望[J].空间控制技术与应用,2008,34 (1):33-37.SUN F C,WU F G,LIU H P.Research and prospects for tele-operation in on-orbit servicing[J].Aerospace Control and Application,2008,34(1):33-37.
[6]王永,谢圆,周建亮.空间机器人大时延遥操作技术研究综述[J].宇航学报,2010,31(2):299-306.WANG Y,XIE Y,ZHOU J L.A research survey on teleoperation of space robot through time delay[J].Journal of Astronautics,2010,31(2):299-306.
[7]ANDERSON R J,Spong M W.Bilateral control of teleoperators with time delay[J].Automatic Control,IEEE Transnctions on,1989,34(5):78-85.
[8]NIEMEYER G,SLOTINE J J.Stable adaptive teleoperation[J].IEEE Journal of Oceanic Engineering,1991,16 (1):336-345.
[9]陈俊杰,黄惟一.遥操作机器人系统克服时延影响的关键技术[J].华中科技大学学报(自然科学版),2004,32(4):187-192.CHEN J J,HUANG W Y.Key technologies of overcoming time-delay infection for telerobot system[J].Journal Huazhong University of Science&Technology(Nature Science Edition),2004,32(4):187-192.
Design and Verification of Manual Teleoperation Rendezvous and Docking System
LIU Zongyu,HU Haixia,LIU Zengbo,WANG Min,ZHOU Yuanlin
(Beijing Institute of Control Engineering,Beijing 100190)
Manual teleoperation rendezvous and docking(RVD)is referred to as the concept that the chaser spacecraft is controlled remotely through teleoperation approach.It can be used as a backup for autonomous RVD for the unmanned spacecraft.The concept of manual teleoperation RVD was introduced briefly.Three manual teleoperation RVD schemes is presented,and a teleoperation RVD system is designed that is easy to realize in engineering project.The key technologies of teleoperation RVD,such as control,time delay and video compressing,is analyzed and the corresponding resolution is given.The teleoperation RVD experiments are carried out for verifying the design.The results show that the design is feasible.
manual teleoperation rendezvous and docking;key technology;time delay;video compressing
TP242
:A
:1674-1579(2016)01-0037-06
10.3969/j.issn.1674-1579.2016.01.007
刘宗玉(1975—),研究员,研究方向为载人航天器导航、制导与控制技术;胡海霞(1977—),高级工程师,研究方向为航天器控制与仿真技术;刘增波(1982—),男,工程师,研究方向为航天器导航制导与控制系统技术设计与地面测试工作;王 敏(1981—),女,高级工程师,研究方向为航天器控制;周远林(1985—),男,工程师,研究方向为航天器控制技术设计和测试.
*国家青年自然基金资助项目(61503024).
2014-09-27
