无拖曳卫星推力器动态模型研究*
2016-04-14胡启阳范旭丰
胡启阳,陈 君,龙 军,范旭丰
(北京控制工程研究所,北京100190)
无拖曳卫星推力器动态模型研究*
胡启阳,陈 君,龙 军,范旭丰
(北京控制工程研究所,北京100190)
无拖曳技术能够有效地抵消卫星的非保守力,适用于未来的空间探测任务.这种技术的实现对推力器提出很高的要求.在广泛调研的基础上,归纳无拖曳卫星中微推力器的工作原理及特点,并介绍其应用情况.根据中国无拖曳技术的发展要求,针对无拖曳冷气微推力器中比例阀的流量控制过程,建立其动态模型进行仿真,并在此基础上设计模糊自适应PID控制器,改善了系统的动态性能.
无拖曳卫星;微推力器;比例电磁阀;模糊PID控制器
0 引 言
无拖曳卫星[1]通过跟随内部放置的检测质量进行运动,能够抵消大气阻力,太阳光压以及其他扰动,从而使自身只受纯重力作用,因此广泛用于空间引力波探测,地球重力场绘制等空间任务.这一过程需要推力器产生连续可变的微小推力,来满足无拖曳控制要求.本文首先介绍了无拖曳卫星中的微推力器及其应用情况,其次对无拖曳冷气推力器模块中流量的比例阀控制过程进行了建模和仿真,最后针对该模型设计了模糊自整定PID控制器.
1 无拖曳卫星推力器简介
无拖曳卫星的推力器需满足高比冲,高精度,快响应以及微小推力(微牛级)的要求[2].目前满足条件的推力器有场致发射电推力器,射频离子推力器,胶体微推力器以及冷气微推力器四种.场致发射电推力器通过对液态金属进行场致电离产生推力,而根据结构不同又分为狭缝式和针尖式;射频离子推力器运用栅极光学系统加速离子体产生推力;胶体微推力器通过加速纳米级小液滴产生推力.4种推力器各有特点[3]:场致发射电推力器比冲高、体积小;射频离子推力器结构简单,易于小型化;胶体推力器精度较高;冷气推力器技术成熟.
目前的无拖曳卫星主要有2004发射的GP-b卫星(16台冷气微推力器),2009年发射的GOCE卫星[4](2台离子推力器,8台冷气微推力器)以及计划于2015年发射的LISA Pathfinder卫星[5](12台场致发射电推力器,8台胶体推力器)等.从传统的冷气推进技术发展到场致发射电推进技术,推力器种类呈现新型化的趋势.与此同时,其工作模式也由单一种类推力器向多种推力器协同工作进行转变.
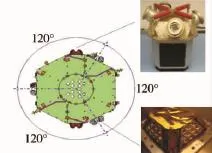
图1 Lisa Pathfinder的推力器布局Fig.1 Thruster layout for Lisa Pathfinder
2 冷气微推力器动态模型研究
随着中国无拖曳卫星计划的提出,其推力器的研究也被摆上日程.结合现阶段微推力器应用现状,选择冷气微推力器进行研究.其工作原理是通过改变阀芯开度,进而改变喷嘴喉部面积,从而改变冷气流量,最终达到调节推力的目的[6].而整个过程中的关键部分就是通过改变电流控制比例电磁阀阀芯的运动.
2.1 模型建立
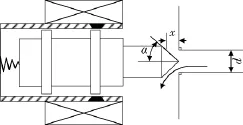
图2 阀芯运动模型Fig.2 Model of spool
当电磁阀的结构确定后,电磁吸力与阀芯开度,以及线圈电流大小有关.理想的比例电磁阀具有水平位移—力特性.当工作在线性区时,电磁吸力为

式中,Kf表示电磁比例放大系数,i表示线圈电流.
(1)阀芯运动方程
电流驱动比例电磁铁阀芯运动时满足如下方程:
式中,Ff表示库伦摩擦力,x表示阀芯开度,m表示阀芯,衔铁和弹簧的综合质量,B表示黏性阻尼系数,k表示机械弹簧刚度,Cd表示流量系数,Cv表示速度系数,Δp表示阀口两端压差.
(2)流量方程
拟采用外流式锥阀,其流量方程为

式中,d表示上游直径,α表示锥阀半顶角,ρ为流体密度.
按照初步设计取值m=2 g,d=0.26 mm,α= 15°,k=7 N/mm.根据文献[7],流体通过阀口的速度系数Cv=0.98.由文献[8]中查得锥阀的流量系数在紊流情况下为恒定值Cd=0.68.根据文献[9]中通过观察滞环大小估算的方法可得库伦摩擦力为Ff=1.5 N.与其他力相比,黏性摩擦力较小可以忽略.两端压差采用实验条件Δp=0.2 MPa,氙气密度按ρ=5.89 kg/m3.
通过SIMULINK软件搭建该模型进行仿真,得到比例阀控制模型的阶跃响应曲线如图3.

图3 阶跃响应曲线Fig.3 Step response curves
根据仿真结果,系统达到稳定的时间超过0.5 s.曲线上升缓慢并且不规则.其主要原因可能是阀芯运动过程中,库伦摩擦力的存在带来的强非线性.
2.2 设计参数研究
研究电磁阀的阀芯质量,弹簧刚度,阀芯半顶角的不同设计对系统响应性能的影响.在前文给出的数学模型和已知参数的基础上,改变设计参数,增加3组实验:1)阀芯质量为3 g和5 g;2)弹簧刚度为6 N/mm和5 N/mm;3)阀芯半顶角为30°和45°.
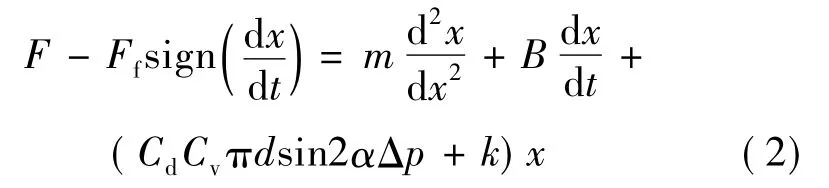
图4 改变参数后的阶跃响应曲线变化Fig.4 Variation of step response curves with changed parameters
图4中(a)、(b)和(c)分别表示阀芯质量、弹簧压力以及锥阀半顶角对系统动态响应的影响.观察曲线易于得出如下结论:
1)改变阀芯质量只影响控制过程达到稳定的时间,不影响稳定后的流量大小.随着阀芯质量的增加,达到稳定的时间变长.
2)改变弹簧刚度对稳定时间与控制的流量都有影响.随着弹簧刚度的减小,控制流量值变大,稳定时间变长.
3)改变阀芯的半顶角只改变控制流量的大小,而基本不影响稳定时间.随着半顶角的增加,控制流量增加.
3 控制器设计
针对电磁阀运动过程中的非线性和时变性.,本文设计了模糊自适应PID控制器[10],在PID控制的基础上利用模糊控制规则实时对PID参数进行修改,如图5所示.
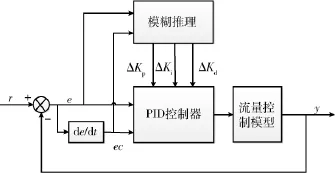
图5 模糊自适应PID控制框图Fig.5 Diagram of fuzzy PID control
计算公式如下:

其中x取p,i,d.
为了设计方便,将流量的变化e,变化率Δe以及ΔKp,ΔKi,ΔKd的论域都定义为[-3 3],语言变量的模糊集为{NB,NM,NS,Z,PS,PM,PB},分别代表负大,负中,负小,零,正小,正中,正大.解模糊策略选择重心平均法.输入输出的隶属度函数均取三角形隶属函数,如图6所示.

图6 隶属度曲线Fig.6 Subjection degree curve
考虑系统的超调量,稳定性,稳态精度,响应时间等因素,制定了模糊控制规则表(表1~3).

表1 ΔKp模糊控制规则Tab.1 Fuzzy control rules of ΔKp
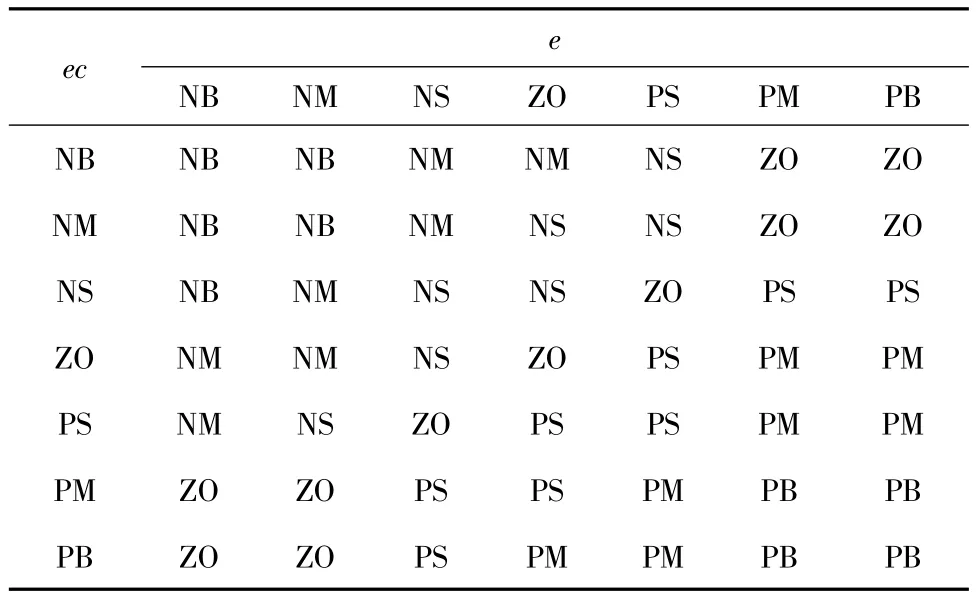
表2 ΔKi模糊控制规则Tab.2 Fuzzy control rules of ΔKi

表3 ΔKd模糊控制规则Tab.3 Fuzzy control rules of ΔKd
参数选择上,e和Δe的量化因子分别取为0.1和0.002,ΔKp,ΔKi,ΔKd的比例因子分别为30,20,0.001.本文采用Matlab语言中的模糊控制箱对模糊PID控制系统进行仿真,分析其时间响应特性,并且比较常规PID控制器与本文设计的模糊自适应PID控制器的性能.令Kp,Ki,Kd的初始值分别为5,200和0.1.流量基准信号的基准值为7,仿真时间0.4 s.结果如图7所示.
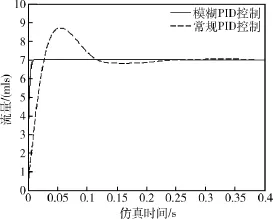
图7 模糊自适应PID控制曲线Fig.11 curves of the fuzzy adaptive PID controller
由图可知,常规PID系统的超调量接近20%,稳定时间超过0.3 s.与常规PID控制下的流量曲线相比,模糊PID控制曲线的响应时间明显缩短,并且几乎没有超调.毫无疑问,所设计的模糊自适应PID控制器在常规PID控制的基础上,动态性能得以明显提高.
4 结束语
1)总结了无拖曳卫星中各种推力器及其应用情况.
2)研究了目前正在研制的无拖曳冷气推力器模型,建立了比例电磁阀流量控制的模型,确定了相关参数,用MATLAB语言中的Simulink工具进行了仿真,并研究了改变设计参数对模型动态响应的影响.
3)针对上述模型存在强非线性,设计了一个模糊自适应PID控制器,并用MATLAB模糊控制箱对该系统进行了仿真.仿真结果表明,与常规PID控制相比,采用模糊自适应PID时流量控制过程具有更好的动态性能.这为后续研究提供了有效的工具.
[1]LANGE B.The control and use of drag-free satellite[D].Stanford:Stanford University,1964.
[2]DEBRA D B.Propulsion requirement for drag-free satellite[J].Journal of Spacecraft and Rockets,1971,8 (4):412-414.
[3]罗子人,白姗,边星,等.空间激光干涉引力波探测[J].力学进展,2013,43(4):434-441.LUO Z R,BAI S,BIAN X,et al.Space laser interferometry gravitational wave detection[J]Advances in Mechanics,2013,43(4):434-441.
[4]STEIGER C,ROMANAZZO M,EMANUELLI P P,et al.Flying at the edge-extremely low altitude operations for ESA’s drag-free gravity mission GOCE[C]//AIAA Guidance,Navigation,and Control Conference.Washington D.C.:AIAA,2013:19-22.
[5]ZIEMER J K,MERKOWITZ S M.Microthrust propulsion for the LISA mission[C]//The 40thAIAA/ASME/ SAE/ASEE Joint Propulsion Conference and Exhibit.Washington D.C.:AIAA,2004.
[6]汪旭东,范旭丰,陈君,等.微小冷气比例推力器模块的数据驱动PID控制策略[J].信息与控制,2014,43 (3):381-384.WANG X D,FAN X F,CHEN J,et al.Data-driven PID control of cold gas micro-Proportion thruster module[J].Information and Control,2014,43(3):381-384.
[7]黄勇.新型电液比例阀的设计及其控制方法的研究[D].长沙:湖南大学,2007.
[8]吴根茂,邱敏秀,王庆丰,等.新编实用电液比例技术[M].杭州:浙江大学出版社,2006:23-24.
[9]方锦辉,孔晓武,魏建华.伺服比例阀的非线性建模与实验验证[J].浙江大学学报,2014,48(5):784-790.FANG J H,KONG X W,WEI J H.Nonlinear modeling and validation of a servo-solenoid valve[J].Journal of Zhejiang University,2014,48(5):784-790.
[10]张国良,曾静,柯熙政,等.模糊控制及其MATLAB应用[M].西安:西安交通大学出版社,2002:85-96.
The Dynamic Model of Thruster for Drag-Free Satellite
HU Qiyang,CHEN Jun,LONG Jun,Fan Xufeng
(Beijing Institute of Control Engineering,Beijing 100190,China)
Drag-Free technology is a key technology for future space exploration,which put forward higher requirements for thrusters.The development and application of micro thrusters for drag-free satellites are introduced based on the investigation of drag-free technology space application.According to the development requirement for Chinese drag-free propulsion,the dynamic model of the mass flow control of proportional valve for drag-free cold gas micro thruster is built.A fuzzy adaptive PID controller is then proposed to improve the dynamic characteristics.
drag-free satellite;micro thruster;proportional valve;fuzzy PID controller
V43
:A
:1674-1579(2016)01-0052-05
10.3969/j.issn.1674-1579.2016.01.010
胡启阳(1991—),男,硕士研究生,研究方向为航天器推进技术;陈 君(1978—),男,高级工程师,研究方向为航天器推进技术;龙 军(1985—),男,工程师,研究方向为传感器技术;范旭丰(1983—),男,工程师,研究方向为电动阀门技术.
*十二五民用航天资助项目(E020415).
2015-02-03
