基于端部漏磁分析的异步电机偏心故障检测
2016-04-12孙跃
孙 跃
(安徽皖南电机股份有限公司,安徽 泾县 242500)
基于端部漏磁分析的异步电机偏心故障检测
孙 跃
(安徽皖南电机股份有限公司,安徽 泾县 242500)
在异步电机中,偏心是一种常见的故障类型,轻则电机性能下降,重则定转子扫膛,电机停机。因此,以异步电机偏心故障为研究内容,提出了基于端部漏磁分析的检测方法。首先利用磁 势-磁导方法求出气隙磁场;然后间接获得端部漏磁分布特性,确定用于诊断偏心的特征谐波;最后通过有限元仿真验证理论分析结果的准确性。提出的方法为偏心检测提供了一个新的选择,具有一定的实用价值。
异步电机; 偏心; 端部漏磁; 特征谐波
0 引 言
偏心故障是指电机定转子间气隙大小不均匀的一种现象。由于加工精度与装配工艺的影响,即使刚出厂的电机也或多或少的存在偏心现象。当偏心程度不超过10%时,该电机能够满足实际生产要求[1]。但是此时电机转子受到不平衡磁拉力、重力、离心力等的作用,随着电机工作时间的增长,这些力的长时间影响,导致轴承磨损、转子发生弯曲。不平衡磁拉力进一步增大,又反作用于转子,它们以上述方式相互作用,最终达到平衡状态,此时的电机偏心程度已经能够影响生产过程。轻则电机性能下降,如铁耗增加、转矩脉动加剧,重则定转子扫膛、电机停机、生产中断。在异步电机所有故障中,机械故障占了50%~60%,而80%的机械故障都与偏心有关[2]。导致故障的原因有很多,文献[3]已经进行了详细的介绍。基于上述可知: 由于偏心无法避免且会给生产带来巨大损失,因此及时地检测出异步电机偏心故障至关重要。
为了研究的方便与实际观察,通常将电机偏心分为两类,如图1所示。静态偏心: 旋转几何轴线与转子几何轴线重合、与定子几何轴线不重合;动态偏心: 旋转几何轴线与定子几何轴线重合、与转子几何轴线不重合。其他偏心类型是这两种基本类型的组合。
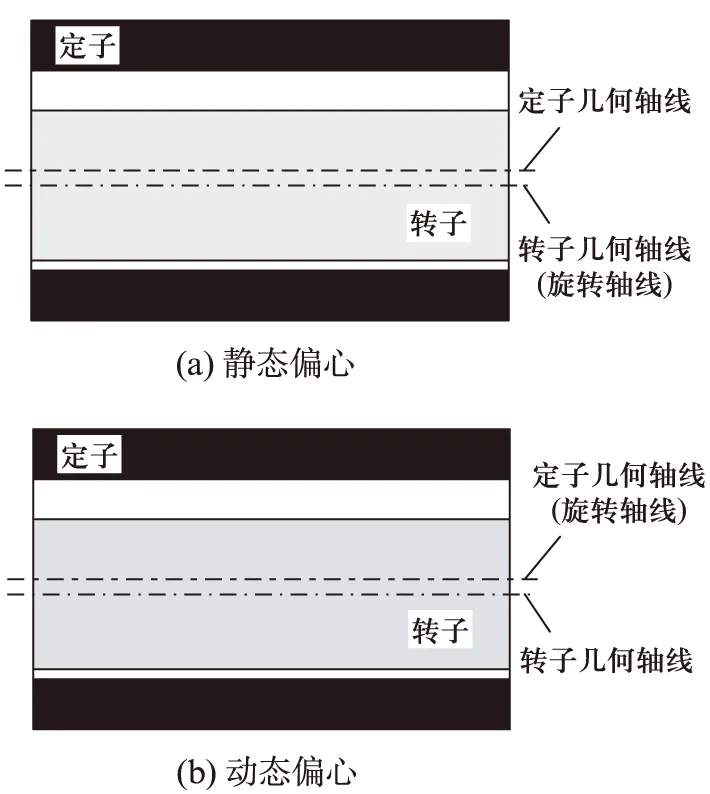
图1 几种常见类型的偏心形式
关于偏心故障,目前很多学者已经做了大量的工作且取得了较好的成果。通常将这些方法分为两类: 侵入式与非侵入式检测。Jaward Faiz总结了12种非侵入式检测方法,如转矩、定子电流高低频成分等[4]。因为定子电流信号易于获取,所以目前最常用的偏心检测方法是基于定子电流特征频率诊断技术[3-5]。但是研究显示,该方法并不适用于所有异步电机,适用范围受到绕组极对数与转子导条数配合的限制[6]。作为非侵入式检测方式,机壳振动信号也被应用于诊断偏心故障中[3-6]。但是振动信号易受干扰且对测量设备精度要求高,故检测结果误差大。电机的各种故障都会导致其磁场的变化,有关学者对此进行了研究,结果表明在电机磁场中包含更多故障诊断信息[7-9]。D.H.Hwang提出利用电机内部磁场测量定子匝间短路故障[10]。也有学者利用磁场诊断偏心故障,Andrian Ceban提出将检测线圈放置到气隙最大与最小对应的定子槽处以测量气隙磁场[11]。但在实际操作中,并不能提前确定最大与最小气隙位置。轴向磁通被用作诊断动态偏心,但缺乏仿真与试验的支持[12]。武玉才利用端部漏磁特征频率诊断汽轮发电机转子匝间短路故障取得了较好结果[13]。
针对上述各方法的缺陷,本文提出利用端部漏磁场诊断电机偏心故障技术。首先分析异步电机不同偏心类型下的磁场特性,确定相应的漏磁场特征谐波;然后利用有限元法验证该方法的准确性。
1 理论分析
1.1 气隙磁场分析
假设供电电源完全正弦,则由定子电流产生的磁动势为
Fs(ω,φ)=Acos(kpφ±ωt)
(1)
式中:ω——基波角频率;φ——在定子参考系中的角度位置;
A——磁动势幅值;
k——系数,k=1,-5,7,-11,13...;
p——定子绕组极对数。
同时包含静态与动态偏心成分的磁导表达式近似为
P≈l0+l1cosφ+l2cos(φ-ωrt)+
l3cosZ1φ+l4cosZ2(φ-ωrt)
(2)
ωr=ω(1-s)/p
(3)
式中:l0、l1、l2、l3、l4——气隙平均长度、静态成分幅值、动态成分幅值、定转子开槽成分幅值;
ωr——转子角频率,其大小可通过式(3)计算获得;
Z1、Z2——定转子槽数。
式(1)与式(2)中静态磁导成分相乘可得气隙磁场:
AP1{cos[(kp-1)φ±ωt]+
cos[(kp+1)φ±ωt]}/2
(4)
式(4)表示的气隙磁场会在导条产生感应电流。这些感应电流又产生转子磁动势。这部分转子磁动势与式(2)中动态磁导成分相乘可得气隙磁场:
A1l1l2cos[kpφ-(ωr∓ω)t-φ1]/4+
A1l1l2cos[(kp-2)φ-(ωr∓ω)t-φ1]/4+
A2l1l2cos[(kp+2)φ+(ωr±ω)t-φ2]/4+
A2l1l2cos[kpφ+(ωr±ω)t-φ2]/4
(5)
由式(5)可知,由于混合偏心,气隙磁场中出现了如式(6)所示的谐波频率。已知当气隙磁场极对数与定子磁动势极对数相同时,才会在定子绕组中产生感应电流,所以式(5)的第一与第四项将在绕组中产生感应电流,也会产生如式(6)所示的谐波频率。
flow=|f±fr|
(6)
无论如何,从上述分析可知,定子电流谐波仅是磁场一部分谐波在绕组中的体现,磁场中含有更丰富的谐波,且不受定子导条数与绕组极对数的限制。
根据上述计算过程可以得出: 相比于正常电机,不同偏心成分引起了气隙磁场特征谐波。与定子电流特征频率对比,可总结如表1所示。
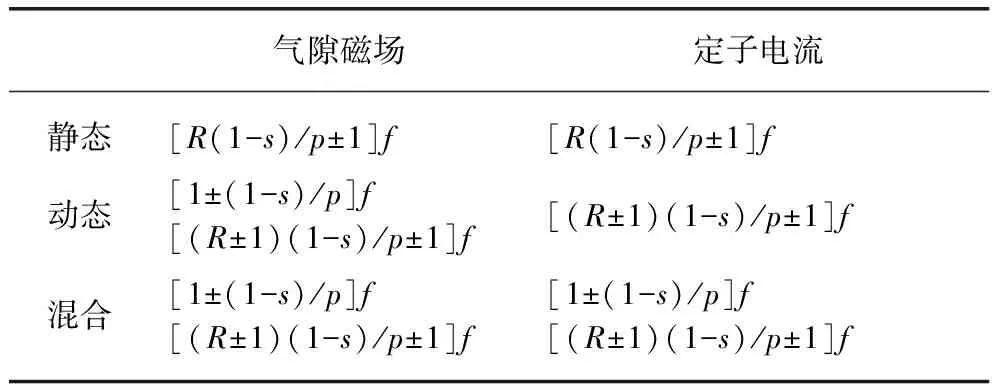
表1 偏心引起的特征谐波
1.2 电机端部漏磁
图2显示了异步电机端部漏磁场分布情况: 一部分是由定子端部绕组电流产生的漏磁场;另一部分由定子端部到转子端部形成闭合回路的漏磁场。根据磁通连续原理,可知这些漏磁场中的谐波与气隙磁场相同。因此,在电机端部漏磁场中,也存在用于诊断偏心的特征频率谐波,与1.1节所述相同。

图2 异步电机端部漏磁分布示意图
2 仿真验证
本文以4对极,3kW,Y连接的笼型异步电机为研究对象,利用有限元方法分析其在不同偏心类型下端部漏磁特性。首先需要建立三维偏心模型,如图3所示。如果全模型进行计算,运行周期很长,浪费资源。为了缩短计算时间,本文利用Ansoft有限元软件仅建立电机端部部分模型,通过移动定转子实现不同类型的偏心故障类型。在瞬态场下进行运算,通过后续操作即可获得相应的端部漏磁场。

图3 Ansoft有限元模型
2.1 静态偏心
图4与图5分别显示了异步电机在正常与静态偏心状态下定子电流、端部漏磁场频谱。通过对比发现在定子电流频谱中,用于检测静态偏心的特征谐波(472Hz,572Hz)尖峰不明显,并不易被观察。在端部漏磁频谱中,该特征谐波尖峰很突出,非常容易观察,但在正常电机中也存在同样的现象。综上所述,无论是基于定子电流,还是端部漏磁特征谐波信号,都无法诊断静态偏心。

图4 正常状态下信号频谱图

图5 静态偏心状态下信号频谱图
2.2 动态偏心
图6显示了异步电机转子导条数R为44时,动态偏心状态下定子电流与端部漏磁频谱。根据前人分析可知: 当该结构的样机发生动态偏心时,定子电流中将会产生特征谐波,与图6所显示的结果吻合。比较定子电流与端部漏磁频谱图可知,在电机端部漏磁频谱中,用于检测动态偏心的特征谐波成分更丰富,与其他谐波相比,也更易区分,更易观察。
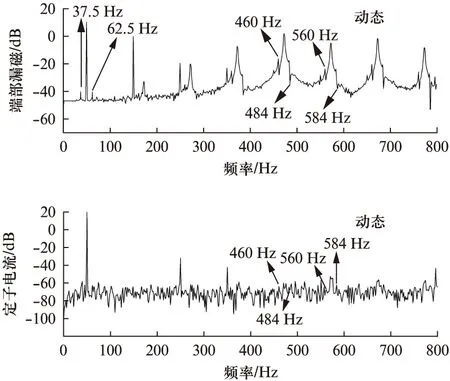
图6 R=44时动态偏心状态下信号频谱图
图7显示了异步电机转子导条数R为43时,动态偏心状态下定子电流与端部漏磁频谱。在端部漏磁频谱中,相应的用于诊断动态偏心的特征谐波同样存在,且易观察。但在定子电流频谱中,这些谐波并不存在。此时,基于定子电流特征谐波的检测方法并不能用于诊断该结构样机,方法失效。

图7 R=43时动态偏心状态下信号频谱图
综上分析可知,基于端部漏磁特征谐波的检测方法不仅可以用于诊断动态偏心,而且不受电机结构即定子绕组极对数与转子导条数配合的限制,与电流信号相比,其适用范围广。
2.3 混合偏心
图8显示了偏心状态下定子电流与端部漏磁频谱。在两个频谱图中,特征谐波信号(37.5Hz,62.5Hz,460Hz,560Hz)相同,但在端部漏磁频谱中,这些信号相对比较容易观察。同时,频率为484Hz,584Hz的谐波在定子电流频谱中很难被区分出来。因此,基于端部漏磁特征谐波的检测方法可以用于诊断混合偏心。比较图6与图8,电机处于动态与混合偏心故障时,特征谐波相同,因此利用该方法不能区分这两种偏心类型。无论如何,只要该方法能诊断电机发生偏心故障即可,同时也达到了本文的研究目的。

图8 混合偏心状态下信号频谱图
3 结 语
本文推导了异步电机在不同偏心状态下气隙磁场分布特性,进而得出偏心故障在端部漏磁场中产生的新的谐波。通过有限元仿真验证,得出结论如下:
(1) 基于端部漏磁信号偏心检测方法不能用于诊断静态偏心;
(2) 基于端部漏磁信号偏心检测方法可以诊断动态与混合偏心,但不能将它们区分;
(3) 基于端部漏磁信号偏心检测方法的适用范围广,不受异步电机结构限制。
[1] NANDI S, TOLIYAT H A. Condition monitoring and fault diagnosis of electrical machines-a review[C]∥ Thirty-Fourth IAS Annual Meeting Conference Record, 1999: 197-204.
[2] FAIZ J, EBRAHIMI B M, TOLIYAT A H. Effect of magnetic saturation on static and mixed eccentricity fault diagnosis in induction motor[J].IEEE Transactions on Magnetics,2009,45(8): 3137-3144.
[3] NANDI S, TOLIYAT H A, LI X D. Condition monitoring and fault diagnosis of electrical motors-a review[J]. IEEE Trans Energy Convers, 2005,20(4): 719-729.
[4] FAIZ J, OJAGHI M. Differences indexs for eccentricity faults diagnosis in three-phase squirrel-cage induction motors: a review[J]. Mechatronics,2009,19(1): 2-13.
[5] NINO J R, PASCACIO A. Detecting inter-turn short circuits in rotor wingdings[J]. IEEE Computer Applications in Power,2001,14(4): 39-42.
[6] 鲍晓华,吕强.感应电机气隙偏心故障研究综述及展望[J].中国电机工程学报,2013,33(6): 93-100.
[7] KARMAKER H C. Broken damper bar detection studies using flux probe measurement and time stepping finite elememt analysis for salient-pole synchronous machines[C]∥4thIEEE Intermational Symposium on Diagnostics for Electric Machines, Power Electronics & Drives,2003: 193-197.
[8] CABANAS F, PEDRAYES M E, MELERO M G, et.al. Unambiguous detection of broken bars in asynchronous motors by means of a flux measurement-based procedure[J]. IEEE Transactions on Instrumentation and Measurement,2011,60(3): 891-899.
[9] SAAD K, MIRZAEVA G. Fault diagnostics of induction motors based on internal flux measurement[C]∥ 2014 IEEE International Conference on Industrial Technology,2014: 201-206.
[10] HWANG D H, HAN S B, WOO B C, et al. Detection of air-gap eccentricity and broken-rotor bar conditions in a squirrel-cage induction motor using the radial flux sensor[J]. Journal of Applied Physics,2008,103(7): 131-133.
[11] CEBAN A, PUSCA R, ROMARY R. Study of rotor faults in induction motors using external magnetic field analysis[J]. IEEE Transactions on Industrial Electronics,2012,59(5): 2082-2093.
[12] VITEK O, JANDA M, HAJEK V, et al. Detection of eccentricity and bearings fault using stray flux monitoring[C]∥ International Conference on Diagnostics for Electric Machines, Power Electronics & Drives, Bologna,2011: 456-461.
[13] 武玉才,李永刚.基于端部漏磁特征频率的汽轮发电机转子匝间短路故障诊断实验研究[J].电工技术学报,2014,29(11),107-115.
Eccentricity Fault Detection of Asynchronous Motors Based on End-Leakage-Flux Analysis
SUNYue
(Anhui Wannan Electric Machine Co., Ltd., Jingxian 242500, China)
Eccentricity was a common fault type in the asynchronous motor. It would deteriorate the performance of the motor. It even made the stator-rotor rub and the motor break down. Therefore, the research content was about the asynchronous motor’s eccentric fault and the detection method was proposed based on the end-leakage-flux analysis. Firstly, the air-gap magnetic field was calculated by the MMF and permeance wave approach. Then the end-leakage-flux was obtained and the corresponding characteristic harmonics for detecting eccentricity were defined. Finally, the accuracy of the theoretical analysis was verified by finite element simulation. The method provided a new choice for the eccentricity detection, which had a certain practical value.
asynchronous motor; eccentricity; end-leakage-flux; characteristic harmonics
孙 跃(1973—),男,本科,高级工程师,研究方向为电机本体设计及其控制技术。
TM 307+.3
A
1673-6540(2016)07-0081-05
2016-04-21
