中空环形行波超声波电机试验研究与改进设计*
2016-04-12蒋春容张津杨董晓霄陆旦宏
蒋春容, 张津杨, 董晓霄, 陆旦宏
(1. 南京工程学院 电力工程学院,江苏 南京 211167; 2. 东南大学 电气工程学院,江苏 南京 210096)
中空环形行波超声波电机试验研究与改进设计*
蒋春容1, 张津杨1, 董晓霄2, 陆旦宏1
(1. 南京工程学院 电力工程学院,江苏 南京 211167; 2. 东南大学 电气工程学院,江苏 南京 210096)
设计了中空环形行波超声波电机的结构,并对定子进行了结构动力学分析,得到定子工作模态对应的共振频率及谐响应分析结果。根据所设计的电机结构尺寸制作了电机样机,并对样机进行了试验测试,得到定子阻抗-频率特性、定子在外加电压作用下的振动响应和电机的输出性能。针对所设计的中空超声波电机输出性能不理想的问题,对定转子的结构和支撑方式进行了改进设计以改善电机性能。试验测试结果表明,改进后的电机克服了原有样机存在的问题,输出性能得到明显改善。
行波超声波电机; 中空环形; 试验研究; 性能优化
0 引 言
超声波电机利用压电陶瓷的逆压电效应激发定子的超声振动,并通过定转子间的摩擦耦合输出转矩,具有动态响应快、断电自锁、电磁兼容性好等优点[1-2],在工业控制、精密仪器、办公自动化等领域有着广阔的应用前景[3-4]。环形行波超声波电机是研究最为成熟的超声波电机。传统的环形行波超声波电机的定子通过定子环内侧较薄的支撑板固定在底座上,定转子间的接触在外圈,转子与中间的转轴相连以输出转矩[5-6],整个电机的外形接近于扁形的实心圆筒。实际上,环形行波超声波电机产生驱动力的位置在圆环上,因此,可把超声波电机做成中空结构,使之适用于需要中空结构的驱动平台上[7],如日本佳能公司将一款中空环形行波超声波电机应用于照相机自动变焦镜头的驱动[8],但该中空超声波电机输出的驱动力矩有限[9-10]。
本文设计了中空环形行波超声波电机的结构,分析了定子的结构动力学特性,根据所设计的电机结构尺寸制作了样机,并对样机进行了阻抗-频率特性测试、定子受迫振动响应测试和电机的输出性能测试。针对试验测试中发现的样机存在的问题,对电机的结构提出了改进措施,克服了原有样机存在的问题,使电机的输出性能得到明显改善。
1 电机结构
所设计的中空环形行波超声波电机的结构如图1所示。电机主要包括底座、外壳、转子、定子和压电陶瓷片等,底座、外壳、转子和定子均为中空环形结构。定子底部粘接压电陶瓷片后放置在底座套筒的外侧,定子沿周向均匀地设置63个齿,转子通过预压力压在定子齿面上。轴承选用角接触球轴承,其内圈与转子接触,外圈与外壳接触。底座的上端设置有止动螺栓,以阻止定子的周向运动。外壳通过紧固螺钉连接底座,通过调节紧固螺钉的松紧可以调整定子和转子之间的法向预压力。在压电陶瓷片的底部设置第一弹性垫片,起到保护压电陶瓷片的作用。轴承与转子之间设置第二弹性垫片,第一弹性垫片和第二弹性垫片同时起到隔振和协助预压力调整的作用。定子材料采用磷青铜,转子采用硬铝合金,压电陶瓷采用PZT-8。

图1 中空超声波电机结构图
2 定子结构动力学分析
所设计的电机定子工作模态选择为弯曲振动模态B(0,7),即节径数为7,无节圆。采用ANSYS对定子进行结构动力学分析,由于要考虑压电陶瓷的逆压电效应,因此选择耦合场单元SOLID5对定子进行网格划分。定子划分网格后如图2所示,其中单元数为4788个,节点数为8669 个。首先对定子进行模态分析,以确定定子工作模态的共振频率,结果如图3(a)所示,工作模态的共振频率为28.7kHz。进一步对定子进行谐响应分析,分析时选择频率范围为25~35kHz,步长为100Hz,施加正弦电压幅值为35V,并设置0.5%的结构阻尼。计算得到如图3(b)所示的定子振幅对应频率变化的曲线,从图3(b)中可以看出,在工作模态的谐振点28.7kHz附近,振幅达到最大值1.44μm。
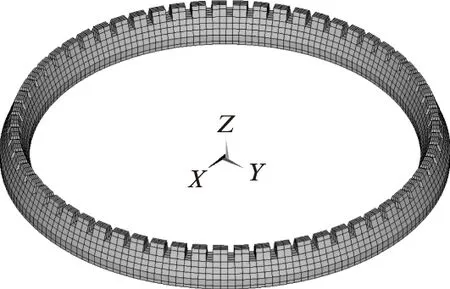
图2 定子网格划分

图3 定子结构动力学分析结果
3 样机试验测试
加工制作的中空环形行波超声波电机各零部件及装配好的样机如图4所示。压电陶瓷一面需要粘接在定子的底部,另一面需要粘接柔性电路板,以便给电机通电。粘接前,先用酒精彻底清洁需要粘接的表面,然后将胶均匀地涂在待粘接的表面上,将定子、压电陶瓷、柔性电路板依次粘接在一起后,放置在加压工装中加压,以便施加一定的压力使各部分紧密接触。最后将整个工装放入温箱中高温固化,在120℃下保持3h,而后自然冷却。粘接完成后,将电机各零部件进行装配,组装好的电机整体为中空结构。

图4 中空环形超声波电机样机
3.1 定子的阻抗-频率特性测试
首先采用基于虚拟仪器技术的阻抗测量方法,测试定子A、B两相的阻抗-频率特性。采用NI公司的LabVIEW作为虚拟仪器开发平台,测试系统如图5所示,采用了LRC测量仪HIOKI3522,PC机和LRC测量仪之间采用GPIB卡进行通信。该测试系统测量时可选择激励为恒压0~5V或者恒流0~50mA,测量频率范围为0~100kHz。

图5 阻抗-频率测试系统
采用以上介绍的阻抗-频率测试系统,对制作的中空超声波电机的定子进行测量。测量时单独取出定子,即定子为完全自由状态(边界条件自由),且没有施加预压力。采用恒压激励方式,仪器所提供的激励电压为5V,测量频率范围为20~50kHz,测量点数为200个,得到的A、B两相的阻抗-频率特性曲线如图6所示。由图6可知,两相的阻抗-频率特性曲线具备良好的一致性。B(0,7)模态振动频率的计算值和测量值列于表1中。在测量值中,工作模态对应两个振动频率,原因在于加工误差和材料不均匀等因素,使得原本为同一个振动频率的两个正交的模态[sin(7θ)和cos(7θ)模态]出现了频率偏差。计算值与测量值中较高的频率基本吻合。

图6 自由状态下定子阻抗-频率特性曲线

振动模态计算值/kHz测量值/kHzB(0,7)28.727.9/29.2
将电机各零部件装配成整机后,再对定子进行阻抗-频率特性测试。测试结果显示,此时A相工作模态的共振频率变为28.1/29.4kHz,B相工作模态的共振频率变为28.3/29.5kHz,在预压力的影响下,定子共振频率略有升高,两相阻抗-频率特性曲线仍基本保持一致。
3.2 定子的振动响应测试
采用德国Polytec公司的激光测振仪(PSV-400-M2)对定子在不同频率和电压幅值激励下的振幅进行测试。测试时,定子为自由状态,即单独取出定子进行测试,如图7所示。测量时采用正弦激励信号,测量频率范围为29.1~29.5kHz,步长取0.1kHz,电压幅值范围为20~40V,步长取5V,将测量得到的数据点连接起来得到不同频率和电压下定子振幅如图8所示。由图8可知,相同的电压幅值下,定子的振幅在共振频率点29.2kHz附近达到最大,越远离共振点振幅越小。在相同的频率下,电压越大振幅也越大。在共振频率点,施加35V的电压幅值时,定子振幅为1.49μm,而定子谐响应分析结果显示,在定子共振频率点施加35V的电压幅值时,定子振幅为1.44μm,理论计算结果与试验测试结果基本吻合。

图7 定子振幅测试试验

图8 不同频率和电压幅值下定子的振幅
3.3 电机的输出性能测试
为了解所设计的中空超声波电机的整体输出性能,将电机的各零部件装配成整机后,给电机通电测试,由信号发生器(美国Tektronix公司AFG320)产生两路相位相差90°的交流信号,分别经过两个功率放大器(日本NF公司HSA4052)放大后,输出给超声波电机的A相和B相,同时将两路放大后的信号送至示波器显示。测试系统实物如图9所示。由定子的阻抗-频率特性测试可知,装配好后电机工作模态的共振频率约为29.4kHz,因此选择测试频率为29.4kHz,测试电机在不同电压幅值下的空载转速,结果如图10所示,其中实心圆点为实测的数据点。施加激励电压的幅值为50V时,电机的空载转速约为28r/min;随着电压幅值逐渐递增,空载转速也近似线性递增,当电压幅值增为100V时,空载转速达到约50r/min。
4 电机结构改进设计
根据对所设计样机的试验研究显示,电机样机存在以下问题: (1) 定子两个正交的工作模态出现了频率偏差,从而导致合成行波畸变,进而影响了电机的性能;(2) 由于压电陶瓷也承受定转子间的预压力,因此所施加的预压力很有限(仅为15N),以防止将压电陶瓷压碎,而在有限的预压力下,电机的输出转矩很小,电机性能并不理想。针对这些问题,对定转子的结构和支撑方式进行了改进,以改善电机输出性能。改进后电机定转子的截面如图11所示,定子通过一个很薄的支撑板固定在底座上,压电陶瓷处于悬空状态,不承受定转子的预压力,定子和转子仍为中空结构。
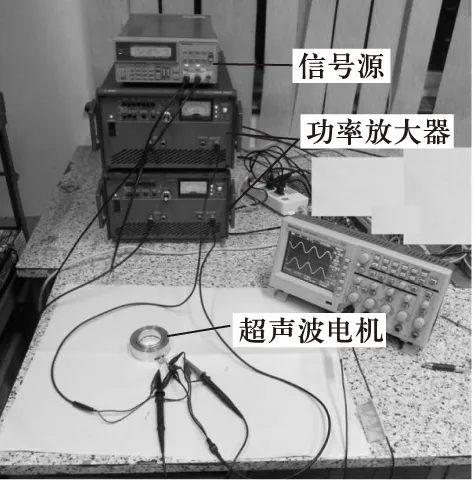
图9 电机输出性能测试系统

图10 不同电压幅值下电机的空载转速

图11 改进后电机定转子截面图
与改进前电机工作在B(0,7)模态不同,改进后的电机工作在B(0,9)模态。对改进后的样机定子进行阻抗-频率特性测试,结果如图12所示,A、B两相工作模态的共振频率分别为34.8kHz和34.9kHz,两相频率基本一致。从图12中也可看出,定子两个正交的工作模态频率完全重合,克服了原来设计的定子两个正交的工作模态出现频率偏差的问题。
改进后电机样机如图13所示。改进后电机整机外径由原来的74mm增加到了84mm,电机内中空部分的直径从原来的42mm减小到30mm。试验测试结果显示,改进前的电机空载转速为50r/min,堵转转矩仅为0.15N·m,而改进后的电机,定转子间可施加300N的预压力,空载转速达到80r/min,堵转力矩达到2N·m。可见,改进后的样机虽然体积略有增大,但输出性能得到了明显改善。
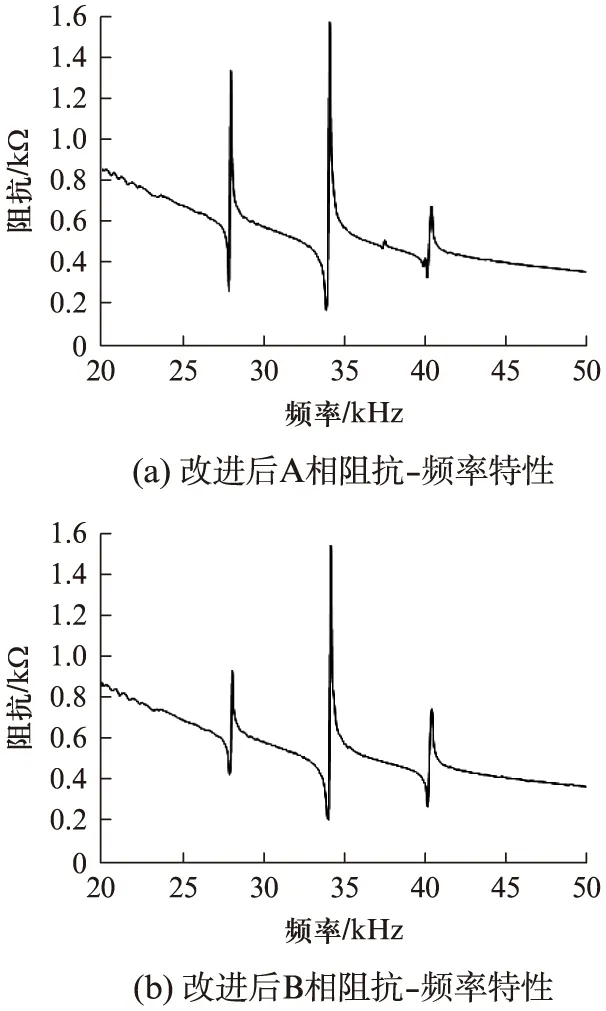
图12 改进后的定子阻抗-频率特性曲线

图13 改进后的电机样机
5 结 语
本文设计了中空环形行波超声波电机的结构,对定子进行了结构动力学分析,根据所设计的电机结构尺寸制作了中空超声波电机样机,并对样机进行了阻抗-频率特性测试、定子振动响应测试和电机的输出性能测试。测试结果表明,定子两相的阻抗-频率特性曲线具备良好的一致性,预压力会使定子的共振频率点略有升高;在相同的电压幅值下,定子的振幅在共振频率点附近达到最大,越远离共振点振幅越小;而在相同的频率下,电压越大振幅也越大,电机的空载转速随着电压的增大而近似线性增加。
针对所设计的中空超声波电机存在定子正交的工作模态出现频率偏差以及所能施加的预压力很有限的问题,对定转子的结构和支撑方式进行了改进。试验测试结果表明,改进后的电机克服了原有样机存在的问题,输出性能得到了明显改善。
[1] 王光庆,岳玉秋,展永政.纵-弯复合旋转式超声波电动机的优化设计与性能分析[J].电工技术学报,2015,30(22): 33-41.
[2] SHI J Z, YOU D M. Characteristic model of travelling wave ultrasonic motor[J]. Ultrasonics, 2014,54(2): 725-730.
[3] 陈欢,史敬灼.基于遗传神经网络的超声波电机转速控制系统[J].电机与控制应用,2010,37(6): 38-41.
[4] RO J S, JUNG S Y, LEE C G, et al. Survey of a contact model and characteristic analysis method for a travelling wave ultrasonic motor[J]. International Journal of Applied Electromagnetics and Mechanics, 2014,46(3): 437-453.
[5] 胡敏强,金龙,顾菊萍.超声波电机原理与设计[M].北京: 科学出版社,2005.
[6] 纪跃波,王涛.双定子单转子旋转型行波超声波电动机转子的优化设计[J].微特电机,2015,43(6): 33-36.
[7] 田秀,王彦利,郞跃东,等.一种中空环形行波型超声波电机的研制[J].振动、测试与诊断,2013,33(S2): 190-193.
[8] 蒋宁.佳能EF28-105mm f/3.5—4.5 USM变焦镜头使用体会[J].照相机,1996(5): 19-20.
[9] MAENO T, TSUKIMOTO T, MIYAKE A. Finite-element analysis of the rotor/stator contact in a ring-type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 1992,39(6): 668-674.
[10] MAENO T, BOGY D B. FE analysis and LDA measurement of the dynamic rotor/stator contact in a ring-type ultrasonic motor[J]. Journal of Tribology, 1993,115(4): 625-631.
Experimental Study and Optimal Design of Hollow Ring Type Traveling Wave Ultrasonic Motor*
JIANGChunrong1,ZHANGJinyang1,DONGXiaoxiao2,LUDanhong1
(1. College of Electric Power Engineering, Nanjing Institute of Technology, Nanjing 211167, China; 2. College of Electrical Engineering, Southeast University, Nanjing 210096, China)
The structure of a hollow ring type traveling wave ultrasonic motor was designed. The structural dynamics of the stator was analyzed and the resonance frequency of the stator working mode as well as the harmonic response of the stator was observed. A prototype machine was manufacutured according to the designed motor dimension. Experimental study on the motor was then conducted. The impedance-frequency characteristics, the forced response of the stator under applied voltage, and the output performance of the motor were obtained. Aiming at the problems existing in the designed hollow ultrasonic motor, the stuructures and the supportig way of the stator and the rotor were improved in order to optimize the motor performance. The experimental results indicated that the problems existing in the original prototype were overcome and the performance of the motor was improved significantly.
traveling wave ultrasonic motor; hollow ring type; experimental study; performance optimization
国家自然科学基金项目(51507076);江苏省自然科学基金项目(BK20140766);江苏省配电网智能技术与装备协同创新中心开放基金项目(XTCX201610)
蒋春容(1983—),女,博士,讲师,研究方向为超声波电机及驱动控制技术。
TM 35
A
1673-6540(2016)07-0040-05
2016-01-22
