基于力矩观测器的导引头陀螺转子方位效应补偿方法
2016-04-10马天义杨海容
雷 昊,马天义,杨海容,朱 牧
(上海航天控制技术研究所,上海,201100)
基于力矩观测器的导引头陀螺转子方位效应补偿方法
雷 昊,马天义,杨海容,朱 牧
(上海航天控制技术研究所,上海,201100)
在红外导引头制导系统设计中,陀螺的方位效应将引起大偏角下控制力矩的衰减,对导引头的跟踪精度和工作范围有重要影响。为实现对陀螺进动控制力矩的补偿,建立陀螺动力学模型和大偏角情况下位标器的力矩器模型。参照干扰观测器DOB的设计方法,将陀螺的俯仰信号引入陀螺和力矩器的标称逆模型,设计实用的陀螺力矩观测器对进动力矩进行补偿。对鲁棒稳定性的小增益条件、补偿效果和补偿器引入相移大小的综合权衡,确定了陀螺力矩观测器的滤波器形式和时间常数。数学仿真结果表明,系统进动力矩在引入力矩观测器后得到了有效补偿,跟踪精度和响应速度得到显著的提高。
动力随动陀螺导引头;力矩观测器;小增益条件;偏角效应
0 引 言
红外导引头位标器的功能是利用动力随动陀螺的进动性和定轴性来实现对红外目标的跟踪[1]。动力随动陀螺由同轴安装的、固联有光学系统的陀螺转子和线圈组成,依靠线圈对陀螺施加旋转力矩和控制力矩,控制陀螺的进动,不断跟踪目标[2,3]。由于同轴安装位标器陀螺的一个固有缺点,大偏角下的进动控制力矩的衰减影响着陀螺的跟踪精度和相应速度,并且制约着陀螺的工作角度范围。文献[4]对方位效应产生的原因和影响作了定性的分析,验证了大偏角存在下控制力矩的衰减和力矩之间的耦合。文献[5]提出了针对偏角效应的力矩补偿方法和电压补偿方法。文献[6]、文献[7]提出了通过干扰力矩观测器对干扰力矩进行补偿来提高系统精度,并分析了干扰观测器的鲁棒性能。
本文针对动力随动陀螺的特点,从陀螺的简化模型出发,建立了陀螺进动控制闭环回路控制系统模型和进动线圈力矩器模型。参照干扰观测器(Disturbance Observer,DOB)的设计方法设计了陀螺的力矩观测器,通过综合权衡鲁棒稳定性的小增益条件、补偿效果和系统相角位移来确定Q滤波器的模型和时间常数。通过仿真验证,所构造的考虑偏角的力矩器仿真模型和实际导引头位标器力矩器模型相符,所构造的力矩观测器补偿方法能够抑制大偏角情况下进动力矩的衰减,提高系统的跟踪精度和响应速度。
1 位标器随动陀螺进动控制系统模型
1.1 坐标系定义
图1为位标器坐标系示意。设坐标系的原点O始终固联在万向支架的旋转重心上,OXYZ为弹体位标器固联坐标系,因为包线和弹体固联,OXYZ也可视为线圈固联坐标系,其中,Z轴为导弹的纵轴,X轴位于右侧舵面,Y轴按照右手定则确定。Oabs为陀螺转子固联坐标系,s轴为转子光学系统轴,a轴为外框架轴,b轴按照右手定则确定。α,β为坐标轴之间的旋转关系角。Oabs坐标系为OXYZ坐标系先绕着OX旋转α角,再绕着Ob轴旋转β角,故cosφ=cosαcosβ其中,φ为弹体轴与陀螺转子轴在空间内的夹角。
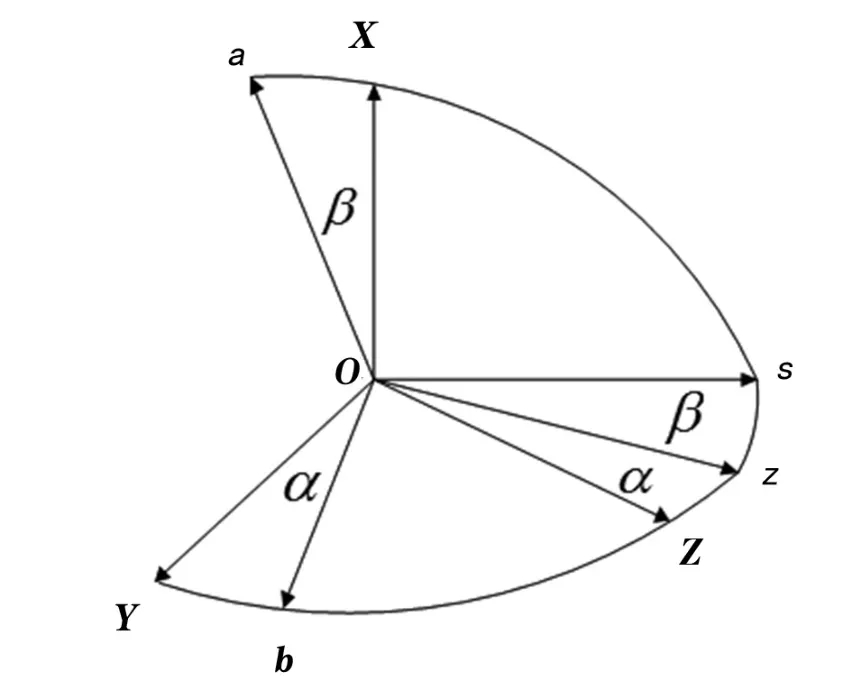
图1 位标器坐标系
两坐标系之间的转换关系为
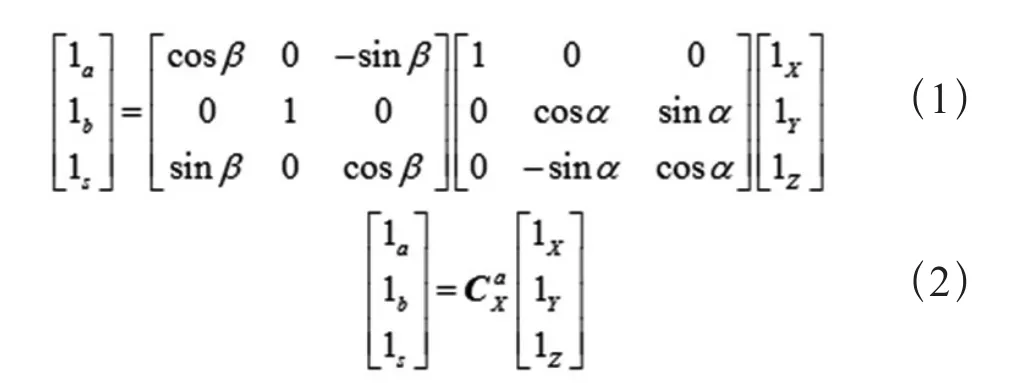
1.2 位标器力矩器模型
对于陀螺动力学模型的建立有多种方法,文献[8]采用考虑陀螺粘性系数的陀螺技术方程来描述动力随动陀螺的运动模型:

式中 α,β为方位动力随动陀螺绕内外环转动的角度;H为陀螺转子动量矩;Ma,Mb,Mfa和Mfb分别为进动线圈对陀螺施加的控制力矩和陀螺本身受到的干扰力矩;J为陀螺的转动惯量;μ为粘性系数.
导引头位标器动力随动陀螺系统由角误差形成环节、调制器光电变换环节、力矩变换器和陀螺系统等环节组成,根据文献[9]位标器陀螺进动控制系统建模见图2。
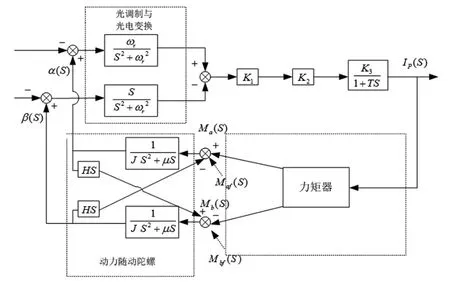
图2 陀螺控制系统模型
1.3 大偏角线圈力矩模型
动力陀螺随动系统的力矩器主要包括高速旋转的磁性陀螺转子和定子线包上圆柱形的螺线管进动线圈,见图3。进动线圈轴线与定子线包轴线重合。大磁钢陀螺转子和进动线圈构成一个交流力矩器。
图3 陀螺力矩器模型
安装在陀螺转子上的光学系统感受到目标辐射后,在进动线圈中产生包含目标方位信息的进动电流ip=i0sin(Ωt-θ),幅值和失调角呈正比关系i0=k0Δq,初始相位角θ即目标方位角。载有交流电流ip的进动线圈将产生交变磁场,此磁场与陀螺转子磁钢的磁场相互作用使得陀螺向着目标方向进动。忽略磁场不连续所产生的端部效应,得到进动电流产生的磁场强度为
将进动线圈所产生的磁场通过坐标变换转换到转子Oabs坐标系,并与陀螺转子的磁场进行差乘求得进动力矩的矢量积为

式(6)中,sin2Ωt与cos2Ωt在一个积分周期内数值为0,故进动力矩产生的作用在一个周期内可以抵消为0,对式(6)进行化简,得到线圈力矩的模型:
式中 第1项和第2项是进动力矩延Oa轴和Ob轴向的分量,可以合成为力矩M:

力矩M使得陀螺转子向着红外目标方向发生进动。由力矩的表达式可以看出,φ角的存在使得进动力矩变小。
2 力矩观测器设计
对位标器陀螺进动控制回路进行简化,忽略惯性耦合力,在纵向平面以俯仰通道为例得到陀螺进动控制系统模型,见图4。
图4 陀螺进动控制系统简化模型
由式(8)可知,简化后的力矩器模型为
而陀螺环节通过求解式(3)可以得到:

针对简化后的动力随动陀螺俯仰通道控制系统,为了补偿由于偏角效应造成的控制力矩随着角的增大而衰减设计的力矩观测器如图5所示。
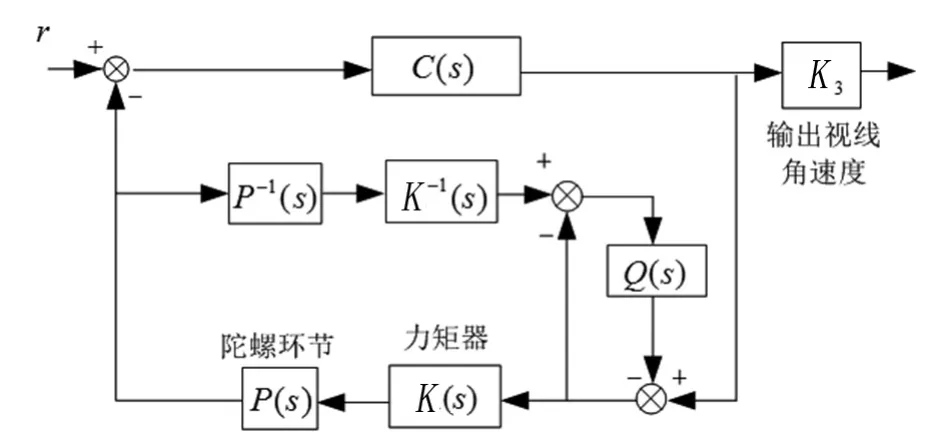
图5 基于简化模型的力矩观测器补偿
简化俯仰通道上,系统控制器

被控对象陀螺环节和力矩器视为一个被控对象,传递函数为

理想的力矩器为易于建模和分析的线性放大环节,故力矩器的标称模型为Kn(s)=K3;同时为了简化力矩观测器的分析和设计过程,将陀螺看作是纯积分环节,则陀螺的标称模型为Pn(s)=1/(Hs),故构造力矩观测器的力矩器和陀螺的逆函数分别为Pn-1(s)=Hs和Kn-1(s)=1/K3。
力矩观测器控制系统的乘性摄动为

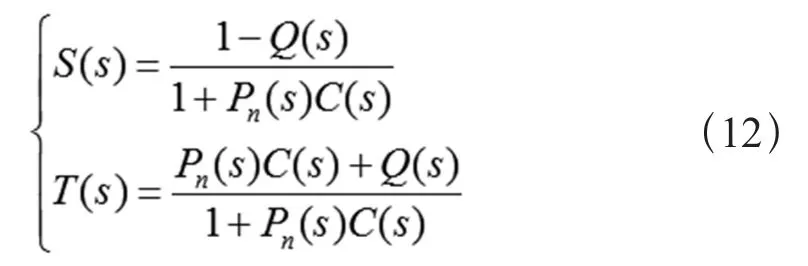
φ角引起的陀螺控制力矩衰减,可以看成是φ角将具有一定规律的干扰力矩引入到了系统中,力矩观测器控制系统的灵敏度函数可以参照干扰观测器系统的灵敏度函数的计算方法,故力矩观测器系统的灵敏度函数S(s)和补灵敏度函数T(s)为
在动力随动陀螺干扰观测器的设计中考虑到一阶滤波器易于实现并且其引入的信号相位移动较小,故设计中采用一阶惯性滤波器:

力矩观测器时间常数的值影响着系统的性能。
根据文献[10]、文献[11]提出的滤波器对系统稳定性影响的小增益定理,整个闭环系统对于动力随动陀螺模型的误差的鲁棒稳定性充分条件满足下式:

通过求解不等式方程组,便可以得到力矩观测器的惯性滤波器时间常数。但是由于小增益定理的保守性,所求的时间常数范围仅供设计阶段参考,同时,由于实际的陀螺进动控制系统为交流信号控制系统,时间常数过大会引入较大的相角位移,故所得到的时间常数还需要通过实验方法优化。
3 仿真分析
忽略惯性耦合,只考虑俯仰通道进动控制系统,对力矩器模型进行仿真,当偏航角保持为0°的时候,俯仰角可以认为是偏角φ。由图6可以看出,俯仰通道的进动控制力矩与俯仰角度的关系并不是线性的,在俯仰角大于0.8 rad时控制力矩发生比较大的衰减,
造成了跟踪精度变差的现象。0.8 rad对应的为46°,位标器的物理仿真结果表明,在40°左右控制力矩出现衰减,陀螺系统的跟踪精度变差,位标器力矩器模型与实物模型相符。
从图7可见,系统俯仰角输入是峰值为1.4 rad、周期为0.2 s的锯齿波信号,表示目标运动最大角度为1.4 rad,角速度为7 rad/s。未补偿的控制系统输出俯仰角最大值为1.16 rad,跟踪速度在目标角度小于0.8 rad时可以达到15.5 rad/s,但是在0.8 rad后,跟踪速度变小,系统无法跟踪俯仰通道的锯齿波输入;引入力矩观测器对控制力矩进行补偿后,陀螺随动系统的跟踪最大值变为1.26 rad,跟踪速度全程可以达到15.5 rad/s,方位角效应引起的力矩衰减和跟踪精度变差现象消失,陀螺在大偏角下的跟踪精度和跟踪速度有所提高。
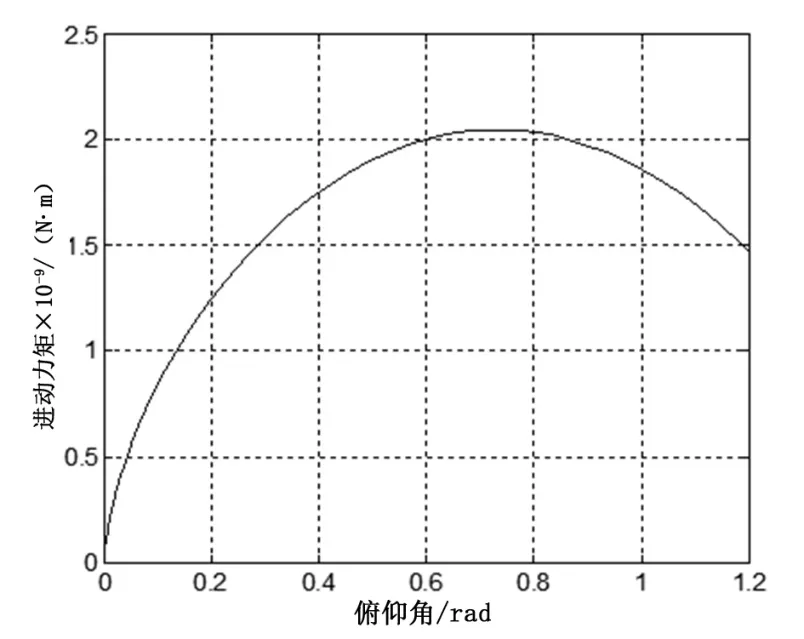
图6 进动力矩与偏角关系
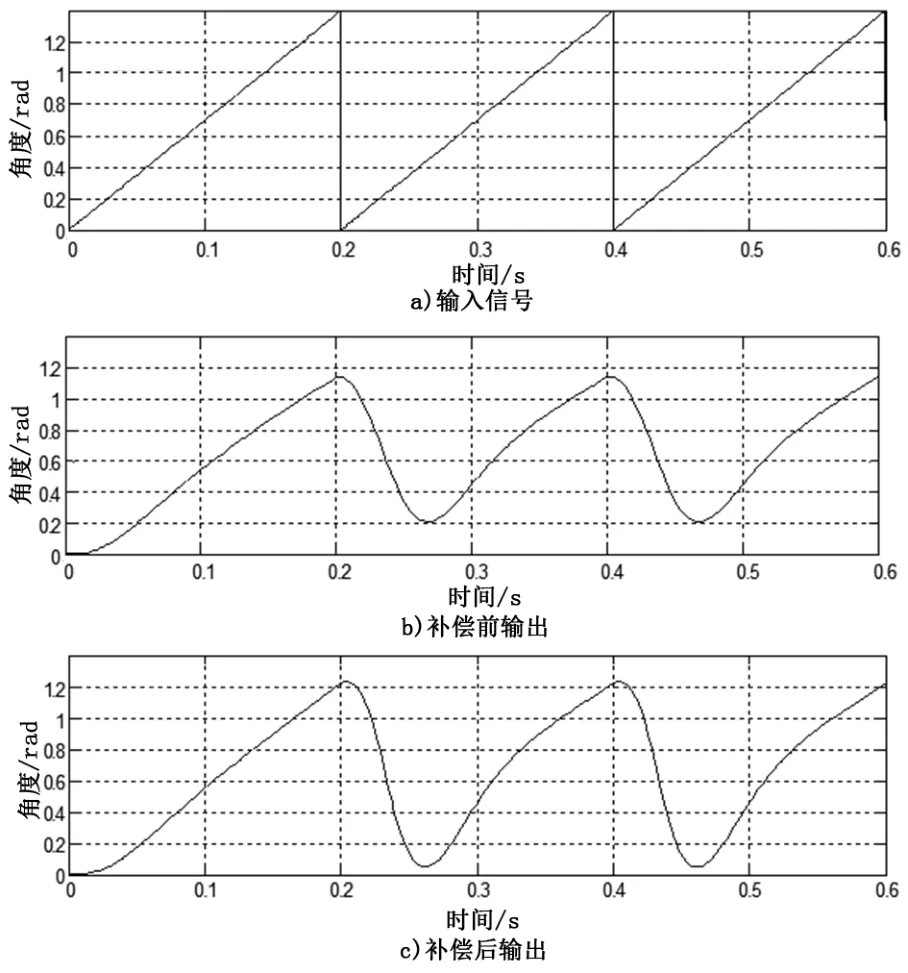
图7 补偿前后系统输出信号对比
在构造的力矩观测器补偿控制系统中,分别选定滤波器时间常数为0.01 s,0.05 s和0.2 s,输出曲线如图8所示。当滤波时间小于0.01 s时,系统出现了震荡不稳定现象;当滤波时间常数为0.2 s时,系统输出峰值为1.18 rad,补偿效果变差。故对于时间常数的选取需要综合权衡小增益条件和补偿效果。
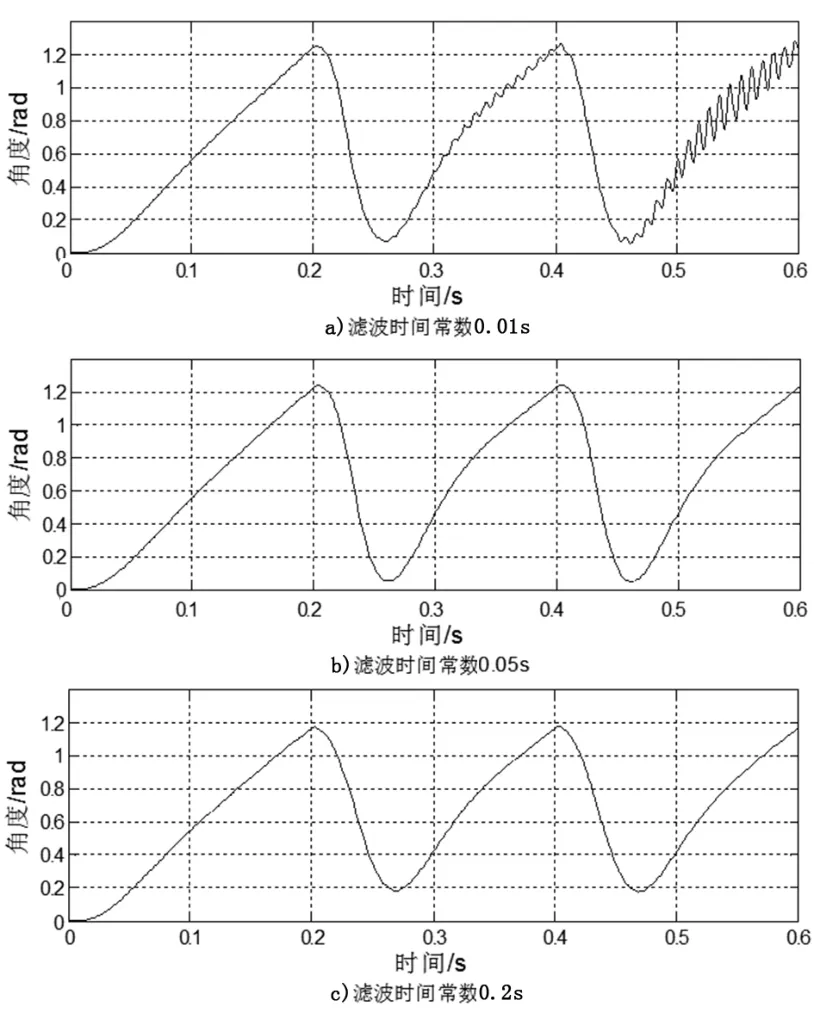
图8 不同时间常数下的补偿效果
当时间常数为0.05 s时,控制力矩如图9所示。
由图9可以看出,当时间小于0.07 s的时候,补偿前后控制力矩曲线基本重合,此时俯仰角小于25 °,方位效应对控制力矩的影响还没有体现出来;当俯仰角大于25°以后,无补偿的陀螺控制系统的控制力矩明显低于有补偿的控制系统的力矩,力矩观测器的补偿作用表现出来;当时间大于0.2 s后,输入信号角度急剧变化为0 °,从图9中可以看出,有力矩补偿器的系统控制力矩相对于无补偿系统的控制力矩变化更迅速,使陀螺的俯仰角更迅速的跟踪目标视线角。综上可以看出,系统精度在引入力矩观测器补偿后有了很大的提高。
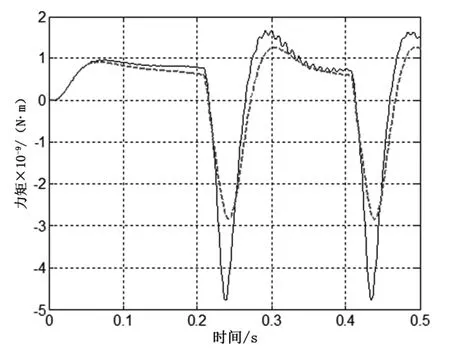
图9 补偿前后控制力矩对比(时间常数为0.05 s)
4 结 论
动力随动陀螺方位角的存在,使得控制系统的进动力矩变小,跟踪精度变差。通过将陀螺的输出俯仰角引入陀螺和力矩器的标称逆模型的方法来构造方位角效应补偿信号,对进动力矩的衰减进行补偿。由小增益定理可以知道,滤波器的时间常数越大,系统的鲁棒稳定性越好。但是位标器动力陀螺的真实控制系统多为交流控制系统,滤波常数过大会引起较大信号的相移,加重陀螺X方向进动和Y方向进动的耦合,故滤波时间常数的选取需要综合权衡系统稳定的小增益条件、补偿效果和引入的相移大小。以上的理论和仿真结果表明,基于力矩补偿器的方位角效应力矩衰减补偿方法对于系统的跟踪精度有很大提高,对实际工程设计有参考意义。
[1] 姚秀娟, 彭晓乐. 几种精确制导技术简述[J]. 激光与红外, 2006, 36(5): 337-340.
[2] 章静. 线圈部件在红外位标器中的作用于机理分析[J]. 自动驾驶仪与红外技术, 2007(2): 18-27.
[3] 魏文俭. 某导引头陀螺进动控制理论研究[J]. 电光与控制, 2008, 15(8): 36-39.
[4] 赵善彪, 张天孝, 李晓钟. 红外导引头位标器陀螺的方位效应研究[J].弹箭与制导学报, 2007, 27(3): 33-35.
[5] 李保平. 红外成像导引头总体设计技术研究(一)[J]. 红外技术, 1995(5): 1-6.
[6] Ohishi K. A New sero method in mechatronics[J]. Trans Jpn Soc Elect Eng, 1987(1): 83-86.
[7] Ohishi K, Murakami T. Advanced motion control in robotics[C]. Philadelphia: In Proceedings of the 15th Annual Conference of IEEE Industrial Electronics Society, USA IEEE, 1989.
[8] 刘希珠. 陀螺力学基础[M]. 北京: 清华大学出版社, 1987.
[9] 陈佳实. 导弹制导与控制系统的分析与设计[M]. 北京: 宇航出版社, 1984.
[10] 尹正男, 苏剑波, 刘艳涛. 基于范数优化的干扰观测器的鲁棒设计[J].自动化学报, 2011, 37(3): 331-340.
[11] Thum C K, Du C, Lcwis F L. disturbance observer design for high precision track following in hard disk drives[J]. IET Control Theory and Application, 2009, 12, (3): 1591-1589.
Precession Magnetic Torque Compensation of Gyro-rotor Azimuth Effect Based on Torque Observer
Lei Hao, Ma Tian-yi, Yang Hai-rong, Zhu Mu
(Shanghai Institute of Spaceflight Control Technology, Shanghai, 201100)
During the designing of seeker, the azimuth effect which reduces the useful torque value directly affects the tracking and measuring accuracies and the guidance precision. For attenuate the azimuth effect, the dynamical servo model and the actuator’s model are accounted firstly. Consult the method of disturbance observer (DOB), make compensatory signal though gyro’s signal, gyro’s normal inverse model and gyro’s normal inverse to compensate the control torque. The hold and filter time constants are specified by balancing disturbance torque compensation, compensatory effect and signal’s phase-shifting. The simulation results show that azimuth effect has been attenuated and the servo tracking accuracy can be improved by the disturbance observer.
Gyro-rotor seeker; Torque observer; Scaled small gain theorem; Azimuth effect
V448.22
A
1004-7182(2016)05-0100-05
10.7654/j.issn.1004-7182.20160521
2015-11-04;
2015-12-22
雷 昊(1989-),男,硕士研究生,主要研究方向为导航、制导与控制