基于ADAMS的共轭凸轮打纬机构动态设计与仿真
2016-04-05金国光秦凯旋张阳演
金国光,秦凯旋,魏 展,张阳演
(天津工业大学现代机电装备技术天津市重点实验室,天津 300387)
基于ADAMS的共轭凸轮打纬机构动态设计与仿真
金国光,秦凯旋,魏展,张阳演
(天津工业大学现代机电装备技术天津市重点实验室,天津300387)
摘要:首先,利用SolidWorks软件对正余弦组合式加速度运动规律的共轭凸轮打纬机构进行三维建模,在ADAMS软件环境下进行动态仿真,得到的筘座运行响应与理论运动规律几乎一致,验证了样机凸轮廓线设计的正确性;其次,在共轭凸轮的两个滚子与凸轮之间加入碰撞副后,筘座的角加速度波动明显,说明了滚子与凸轮间的接触碰撞会加剧机构振动;滚子与主、副凸轮间接触力交替变化,说明设计的打纬机构能够实现惯性打纬的要求;最后,提出了通过改变筘座材料属性来减小滚子与凸轮间接触力的方法.
关键词:ADAMS;共轭凸轮;打纬机构;碰撞副;仿真分析
剑杆织机具有转速高、精度高、惯性力大的特点,其核心机构主要包括开口机构、打纬机构、引纬机构、卷取和送经机构[1-2].共轭凸轮是几何锁合型机构,它有很高的运动精度,适合高、中型载荷的高速场合,这些优点是利用弹簧力回程的力锁合型凸轮机构所不具备的[3-4].目前,越来越多的剑杆织机为了提高转速而广泛使用共轭凸轮打纬机构[5-6].但是,当凸轮机构高速运转时,由于从动件的惯性力剧增以及滚子与凸轮间的相互碰撞,会引发机构的振动,导致工作端运动规律偏离预定的要求[7],产生动态偏差,缩短凸轮的寿命.因此,减小机构的振动和延长凸轮的寿命,是改进剑杆织机的重点. ADAMS软件[8-10]是目前比较广泛使用的动力学仿真软件,通过建立机械系统的模拟样机,使得在物理样机建造前便可分析它们的工作性能,能够满足真实系统的并行设计要求,受到了机械领域的广泛重视.万朝燕等[11]基于ADAMS建立了高速凸轮机构的弹性动力学模型,得到了从动件运动规律曲线,为凸轮机构的设计提供了依据,并且完成了在不同推杆刚度下,高速凸轮机构的动力学特性分析与比较. Tang等[12-13]利用Pro/Engineer二次开发功能对共轭凸轮打纬机构进行了三维参数化设计,并应用ADAMS对机构动态性能的可靠性进行了验证.近年来,学者们通过ADAMS软件对凸轮机构的研究越来越多,但是计及凸轮与滚子间的接触碰撞的研究较少.
根据以上研究现状,本文以正余弦组合式加速度运动规律的共轭凸轮打纬机构为例,在ADAMS环境下计及凸轮与滚子间的接触碰撞,对共轭凸轮打纬机构进行动态设计与仿真研究.
1 模型建立
1.1工作原理
共轭凸轮打纬机构简化模型如图1所示.主凸轮和副凸轮绕主轴A回转时,通过2个滚子带动2个摆臂和筘座脚绕摇轴B摆动,使筘座带动钢筘完成打纬的往复运动[14].
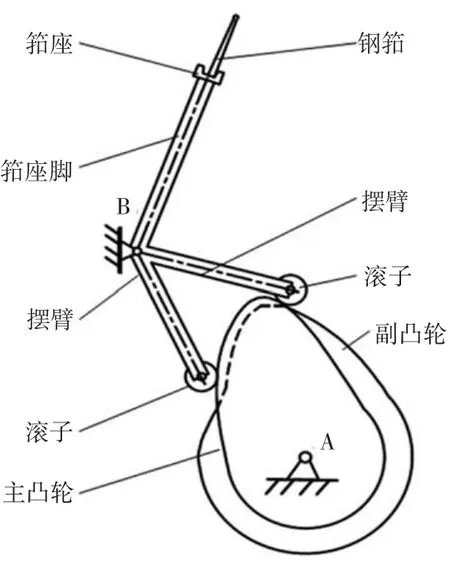
图1 共轭凸轮打纬机构简图Fig.1 Sketch of conjugate cams beating-up mechanism
1.2筘座运动规律
根据剑杆织机打纬的工艺要求,筘座在向前打纬时,筘座的角加速度应由零逐渐递增,筘座向后摆动时,加速度应逐渐递减到零,加速度的变化应该缓和.单一的运动规律无法满足以上工艺要求,样机采用正余弦组合加速度运动曲线,如图2所示.

图2 正余弦组合加速度曲线Fig.2 Acceleration curve of sine and cosine
图2中:1~2为正弦曲线正半周,其峰值为A;2~ 3为余弦曲线负半周,其峰值为B;3~4为正弦曲线正半周,其峰值为A.
以下是正余弦加速度组合运动规律方程:

式中:ε2为筘座角加速度;θ为动点在辅助圆上的角位移;b为时间分配系数.
将筘座角加速度进行积分运算便可得到筘座的角速度和角位移的相应公式.
1.3导入模型
将在SolidWorks中建立的三维模型保存为Parasolid(x_t)的格式,将所建立的几何模型导入到ADAMS软件中.图3为导入到ADAMS中的打纬机构模型.
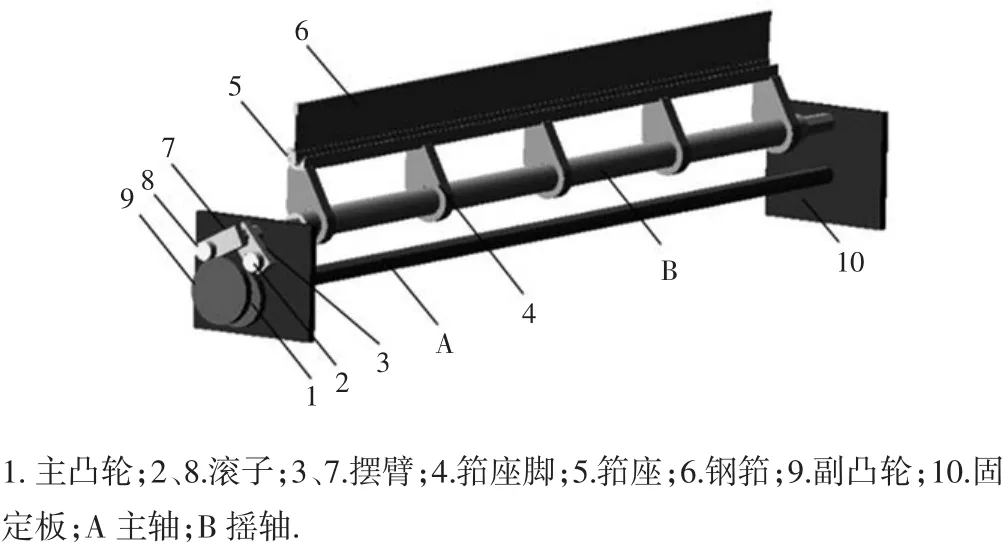
图3 共轭凸轮打纬机构模型Fig.3 Model of conjugate cams beating-up mechanism
模型导入到ADAMS软件后,需要对打纬机构各个构件进行材料的设置和构件之间的约束设置,本文中打纬机构中构件的材料全部选用合金钢,构件间约束的设置如表1所示.
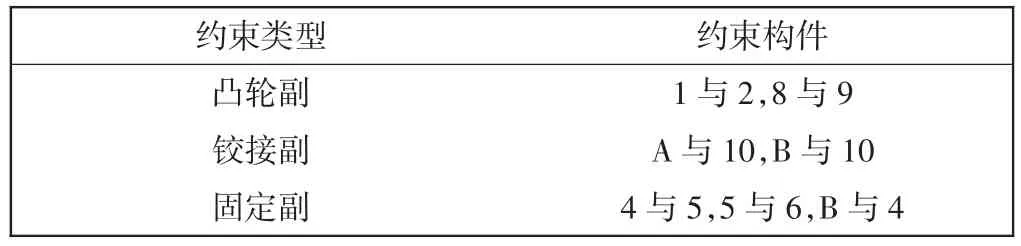
表1 打纬机构构件约束表Tab.1 Restriction among parts of beating-up mechanism
1.4打纬阻力的确定
在实际的打纬过程中,打纬阻力是一种随着筘座运动而变化的力,将打纬阻力转换为摇轴的等效转矩[15]:

式中:M为等效转矩;q为打纬均布力;L为筘座长度;r为摇轴中心到打纬点之间的距离.
在本样机中,各参数取值为q = 1 500 N/m,L = 1.8 m,r = 0.14 m,将数据带入到式(4)得

样机从打纬筘座开始打纬到打纬结束所用过的时间为0.15 s,所以M(t)的Step函数表达式为

图4为ADAMS中输入Step函数后所得到的等效转矩图.从图4中可以看出在筘座到达前死心时摇轴等效转矩最大,到达后死心时筘座等效转矩为零,所以打纬阻力更接近真实情况.
图4 ADAMS中等效转矩图Fig.4 Equivalent torque diagram in ADAMS
2 仿真分析
2.1验证样机模型
在ADAMS中,在凸轮与滚子间加入凸轮副,即不考虑滚子与凸轮的接触碰撞,只是让滚子与凸轮保持接触,以400 r/min的转速进行仿真.所得到的仿真图像如图5、图6和图7所示.

图5 筘座角位移对比图Fig.5 Contrast of sley angular displacement
图5、图6和图7为将ADAMS所得数据导入到MATLAB软件中,并与MATALB所得出的理论曲线的对比图.从图中看出筘座的角位移、角速度和角加速度中曲线几乎重合,说明样机凸轮廓线设计的正确性,也说明了ADAMS软件仿真的可靠性.
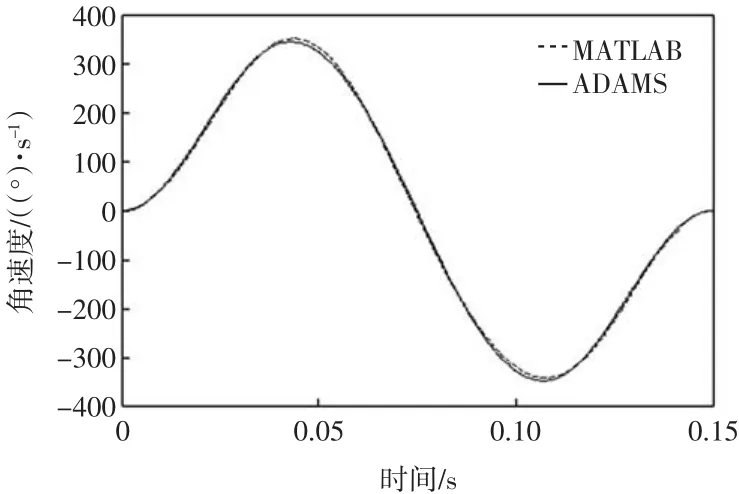
图6 筘座角速度对比图Fig.6 Contrast of sley angular velocity
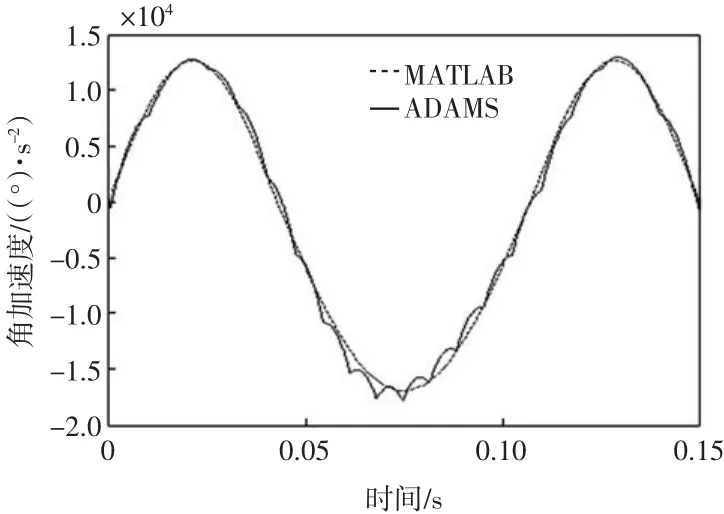
图7 筘座角加速度对比图Fig.7 Contrast of sley angular acceleration
2.2计及接触碰撞与摩擦的仿真分析
在实际的运动过程中,凸轮与滚子间存在着接触碰撞,ADAMS软件中提供了一种等效的弹簧阻尼碰撞模型,即Impact模型[16].
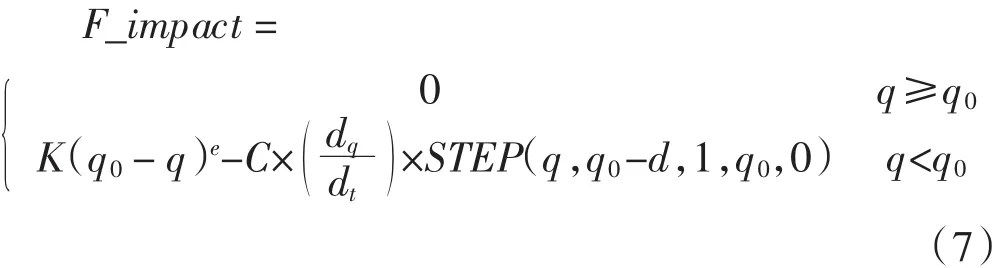
式中:K为接触刚度;e为非线性指数;C为阻尼系数;STEP为阶跃函数;q0为两物体间的初始距离;q为物体碰撞过程中的实际距离;d为物体的穿透深度;q0-q为碰撞过程中的变形量.
Impact模型中的接触碰撞力主要分为2部分:一部分为类似于一个非线性弹簧的弹性分量K(q0- q)e;一部分为阻尼分量碰撞力模型如图8所示.
共轭凸轮与滚子之间的接触,可以看成是2个变曲率半径柱体的撞击问题,2个圆柱体撞击时法向接触力P和变形δ的关系为:

阻尼分量可以根据Hertz弹性碰撞理论进行分析,在碰撞的过程中里的变化主要由弹簧控制,即按照准静态的方式变化.
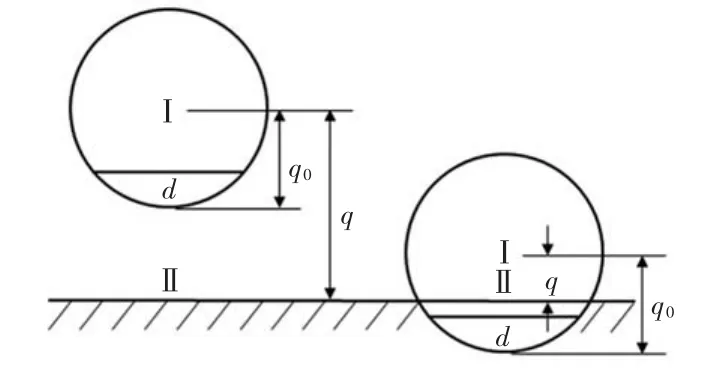
图8 ADAMS碰撞力示意图Fig.8 Collision force diagram in ADAMS
接触刚度可以用如下公式来计算:

其中

式中:R1、R2分别为凸轮和滚子接触点的当量半径;μ1、μ2分别为凸轮和滚子材料的泊松比;E1、E2分别为凸轮和滚子材料的杨氏模量.
根据以上接触碰撞理论,由打纬机构的各个构件的材料特性便可计算得出需要的相关参数,在本仿真中由于阻尼分量贡献较小,阻尼系数C取50 N·s/mm.由于转轴间是无间隙啮合,而且滚子与凸轮间的接刚度比输入轴的扭转刚度大的多,所以,啮合点处的接触弹性变形可以忽略,穿透深度d取0.1 mm.在凸轮与滚子间加入接触碰撞副.
为了使仿真出来的结果更加符合实际情况,在作动力学计算时往往要考虑摩擦力的存在,所以在主轴与固定板间的铰接副、摇轴与固定板间的铰接副中分别添加摩擦力,所添加的摩擦力按照ADAMS软件中默认的设置添加.在计及接触碰撞与摩擦后所得的仿真图像如图9—图12所示.

图9 筘座角位移对比图Fig.9 Contrast of sley angular displacement

图10 筘座角速度对比图Fig.10 Contrast of sley angular velocity

图11 筘座角加速度对比图Fig.11 Contrast of sley angular acceleration
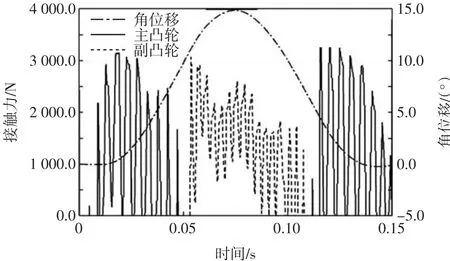
图12 主副凸轮接触力Fig.12 Contact force of main and sub cam
从图9中可以看出,加入接触碰撞副后筘座的角位移曲线与理论曲线依然基本重合,图10中角速度有所波动,图11中角加速度波动较为明显,这是由于主副凸轮与滚子间的不断碰撞导致了打纬机构的振动.图12为主副凸轮与滚子间的接触力图,从图12中可以看出在打纬的过程中,主凸轮和副凸轮与滚子的接触力交替变化,在打纬一开始,筘座向前摆动时,主凸轮先受力,主凸轮将力传递给滚子然后带动筘座摆动,在筘座还未到前死心时,副凸轮就已经受力,说明此时打纬机构的惯性力开始大于打纬阻力,筘座已经不再需要主凸轮推动,而是靠惯性力继续向前摆动,由于共轭凸轮的形锁合结构,使副凸轮开始受力.副凸轮的受力一直要持续到钢筘从前死心摆动回来的一段,在此过程中副凸轮的受力在逐渐减小,说明惯性力一直减小,直到惯性力小于打纬阻力时,主凸轮重新开始受力.从图12中还可以看出,主副凸轮所受的接触碰撞力的峰值大小几乎一样,说明在设计主副凸轮时应该按照相同的压力角设计比较合理.
2.3动态特性的改进
打纬机构能实现惯性打纬,这与筘座的质量有着紧密的关系,在能保证有足够的打纬力的前提下,不改变筘座的结构,以合金钢筘座和铝合金筘座做对比来研究打纬机构动态特性.表2为合金钢和铝合金的材料特性对比表.

表2 筘座材料特性Tab.2 Material properties of sley
图13为合金钢和铝合金筘座主副凸轮接触力对比图.

图13 接触力对比图Fig.13 Contrast of contact force
从图13中可以看出,当筘座材料为铝合金时,凸轮与滚子间的接触力要小于筘座材料为合金钢的,所以在保证惯性力大于打纬阻力的前提下,可以通过减小筘座的质量来减小滚子与凸轮的接触力,从而可以延长凸轮的寿命.
3 结论
(1)将不计入接触碰撞的打纬机构与MATLAB软件中的数据进行对比验证了凸轮轮廓设计的正确性.计入接触碰撞的仿真过程更符合实际情况,从所得的仿真结果中看出由于滚子与凸轮的接触碰撞,机构的振动更加明显,会影响织造的均匀性.
(2)在惯性打纬的过程中主副凸轮交替受力,在筘座角位移未达到最大摆角处副凸轮已经受力,说明满足惯性打纬的要求,主副凸轮的接触碰撞力峰值接近,说明在设计时应按照相同的许用压力角进行设计.
(3)可以通过减小筘座的质量减小主副凸轮的接触力,延长凸轮的寿命.所得结论将为共轭凸轮打纬机构的优化设计奠定较为坚实的理论基础.
参考文献:
[1] YU Z C,ZHANG J F,LOU C W,et al. Processing and properties of multifunctional metal composite yarns and woven fabric [J]. Materials and Manufacturing Processes,2015,30(3):320-326.
[2] KIM H A,KIM S J. Mechanical properties of worsted fabrics for emotional garment to the rapier loom characteristics [J]. Fibers and Polymers,2013,14(12):2163-2168.
[3] ONDRASEK J. The synthesis of a hook drive cam mechanism[J]. Procedia Engineering,2014,96:320-329.
[4] CHANG W T,WU L I. Calculating actual profiles of conjugate disk cams by means of conjugate variation measurement [J]. Journal of Mechanical Science and Technology,2011,25(12):3083-3098.
[5]唐雪梅,朱伟林,赖奇暐,等.共轭凸轮打纬机构运动精度分析[J].机电工程,2014,31(2):173-176. TANG X M,ZHU W L,LAI Q W,et al. Analysis of kinetic precision on conjugate cams beating-up mechanism[J]. Journal of Mechanical & Electrical Engineering,2014,31(2):173-176(in Chinese).
[6]滕兵,何勇.共轭凸轮打纬机构弹性动力学和限元分析[J].机械设计与制造,2006(2):39-40. TENG B,HE Y. The analysis of conjugating cam in beatingup mechanism with finite element and elastic dynamics [J]. Machinery Design & Manufacture,2006(2):39-40(in Chinese).
[7]苏利亚.高速凸轮机构的动力学分析[J].机械设计与制造,2008(12):181-182. SU L Y. Dynamic analysis of the high-speed cam gear[J]. Machinery Design & Manufacture,2008(12):181-182(in Chinese).
[8]曾一鸣,曾京,可心萌.基于ADAMS的铁道车辆脱轨后动态行为研究[J].机械工程与自动化,2015(1):7-8. ZENG Y M,ZENG J,KE X M. ADAMS based post-derailment dynamic behavior of railway vehicles [J]. Mechanical Engineering & Automaion,2015(1):7-8(in Chinese).
[9]韩董董,王成军,陈蕾,等.基于ADAMS的三维并联振动铸造机的仿真与优化[J].铸造技术,2014,35(11):2721-2723. HAN D D,WANG C J,CHEN L,et al. Simulation and opti-mization of 3D parallel vibration casting machine based on ADAMS [J]. Poundry Technology,2014,35(11):2721-2723(in Chinese).
[10]刘鹏展,贾国欣,任家智,等.精梳机钳板机构的振动分析[J].纺织学报,2015,36(9):108-113. LIU P Z,JIA G X,REN J Z,et al. Simulation and vibration of combing nipper mechanism [J]. Journal of Textile Research,2015,36(9):108-113(in Chinese).
[11]万朝燕,李培行,庄绪红.基于ADAMS的凸轮机构弹性动力学分析[J].大连交通大学学报,2010,31(1):45-48. WAN C Y,LI P X,ZHUANG X H. Elas to dynamics analysis of cam mechanism based on ADAMS [J]. Journal of Dalian Jiaotong University,2010,31(1):45-48(in Chinese).
[12]唐雪梅,巫世晶,梅顺齐,等.共轭凸轮打纬机构的刚柔耦合动力学仿真研究[J].天津工业大学学报,2012,31(2):27-31. TANG X M,WU S J,MEI S Q,et al. Rigid-flexible coupling dynamics simulation of conjugate cam in beating-up mechanism[J]. Journal of Tianjin Polytechnic University,2012,31 (2):27-31(in Chinese).
[13] TANG X,WU S,MEI S,et al. Parameterized design of beating-up mechanism in rapier loom based on pro/engineer program development[C]//Computer Supported Cooperative Work in Design(CSCWD),2012 IEEE16th International Conference on. Wuhan:IEEE,2012:109-112.
[14]邓威进,周香琴.基于Pro/E的织机打纬系统载荷特性研究[J].机电工程,2014,31(3):320-324. DENG W J,ZHOU X Q. Beating -up mechanism in rapier loom based on Pro /E loading characteristic[J]. Journal of Mechanical & Electrical Engineering,2014,31(3):320-324 (in Chinese).
[15]邱海飞.基于ADAMS的四连杆打纬机构动态设计与仿真[J].机械传动,2011,35(7):52-55. QIU H F. The dynamic design and simulation of 4-bar beatingup mechanism based on ADAMS [J]. Mechanical Drive,2011,35(7):52-55(in Chinese).
[16]葛正浩. ADAMS 2007虚拟样机技术[M].北京:化学工业出版社,2010. GEZH.ADAMS2007 Virtual Prototyping Technology[M]. Beijing:Chemical Industry Press,2010(in Chinese).
Dynamic design and simulation of conjugate cams beating-up mechanism based on ADAMS
JIN Guo-guang,QIN Kai-xuan,WEI Zhan,ZHANG Yang-yan
(Advanced Tianjin City Key Laboratory of Modern Mechatronics Equipment Technology,Tianjin Polytechnic University,Tianjin 300387,China)
Abstract:Firstly,a model of the conjugate cams beating -up mechanism with sine and cosine curve is created by SolidWorks,then the whole system is simulated with ADAMS. The sley operation response and theory movement are almost the same,which indicates that the design of the cam profile is correct. Secondly,adding the collision pairs between the two roller and the cam,the angular acceleration of sley fluctuates significantly,which indicates that the vibration of the mechanism is increased due to the contact between the roller and the cam. The alternate changed contact force between the roller and the main sub cams indicates the design of the beating -up mechanism can meet the requirements of the inertia beat up. Finally,a method for reducing the contact force between the roller and the cam is proposed by changing the sley materials.
Key words:ADAMS;conjugate cam;beating-up mechanism;collision pairs;simulation analysis
通信作者:金国光(1963—),男,教授,博士生导师,主要研究方向为机器人机构学,机械系统动力学及其控制. E-mail:jinguoguang@tjpu.edu.cn
基金项目:国家自然科学基金资助项目(51475330)
收稿日期:2015-10-26
DOI:10.3969/j.issn.1671-024x.2016.01.013
中图分类号:TH112.2
文献标志码:A
文章编号:1671-024X(2016)01-0065-05
