全电农用激光平地机的设计
2016-03-23齐俊滕刁培松马明建
齐俊滕,刁培松,马明建,李 滕
(山东理工大学 农业工程与食品科学学院,山东 淄博 255049)
全电农用激光平地机的设计
齐俊滕,刁培松,马明建,李滕
(山东理工大学 农业工程与食品科学学院,山东 淄博255049)
摘要:针对现有农用激光平地机对复杂地形的适应能力差、精平机当作粗平机使用的问题,设计开发了全电农用激光平地机。全电农用激光平地机主要由机架、电动伺服缸、抬铲省力机构及斗门机构构成。其中,斗门机构主要由驱动系统、控制系统和机械部分组成,可以完成土壤的搬运。田间试验结果表明:在复杂地形下工作,该机构对土地平整的平整精度较传统机型有较大提高,作业质量符合农艺要求,机具结构设计合理。
关键词:电动伺服缸;激光平地机;斗门
0引言
精细平地技术是实现精细农业的保证,高精度的土地平整是提高水资源利用率从而缓解我国的水资源短缺现象的途径之一[1-3]。进行农田的土地平整、改善农田的表面情况,有利于改善农田的灌溉情况[4],提高化肥的利用率,减少病、虫害,提高作物产量,是实现现代农业的必要要求[5]。
传统激光平地机结构多是采用液压执行机构控制抬铲机构和桅杆[6-7]。平地机在农田工作时振幅较大,而桅杆都是焊接在机架上,通过液压机构来控制起落,机器震动时桅杆没有减震装置,在作业过程中桅杆经常折断,导致桅杆上安装的激光接受器也会受到损害。抬铲机构的左右两部分都安装在一个轴筒上,液压机构只能控制机构同起同落,在复杂地形下作业的平整精度较差,平整后的田地成锯齿状分布;液压执行机构在长时间工作时会出现油温过高的现象,而且液压缸会出现过冲现象,对平地机的平整精度有较大影响。
现有激光平地机工作时,在地形较复杂的田地上首次作业的效率较低,通常先粗平后再进行精细平整[8]。全电农用激光平地机采用电动控制代替液压执行机构,设计了全新的电动桅杆和电动伺服缸;在电动桅杆下方增加了减震平台来缓解机器工作振幅对电动桅杆的影响;改进了抬铲机构,使其成为省力机构,在机器工作时能够根据机器实时的水平度来分开调节。
全电农用激光平地机对传统激光平地机存在的问题进行了改进和创新,对提高农田的平整精度和平整效率有重大意义。
1总体设计及工作原理
1.1总体设计
分析现有激光平地机工作原理及其优缺点,确定新型的全电农用激光平地机的总体设计方案。全电农用激光平地机的总体设计如图1所示。
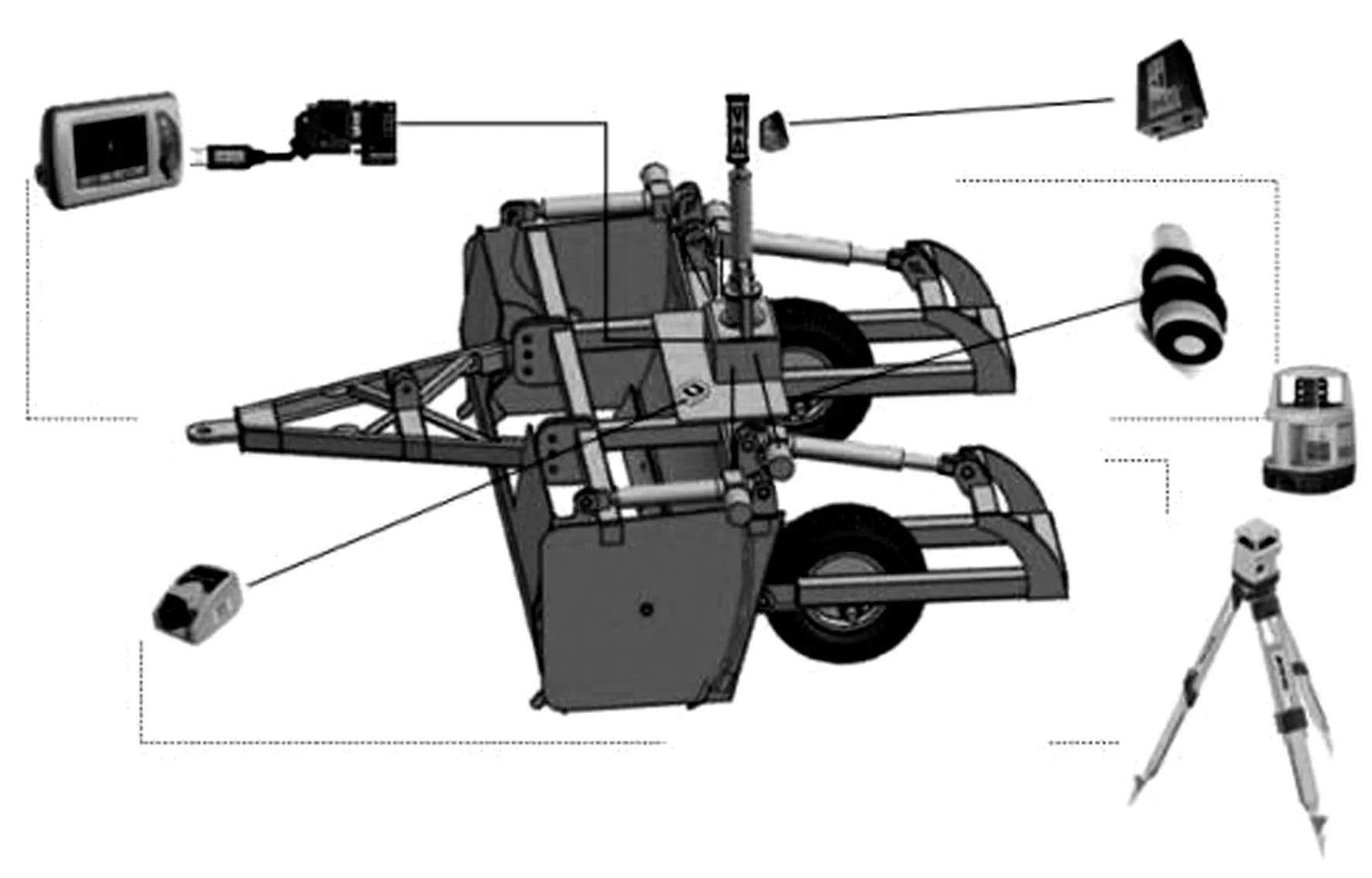
图1 全电激光平地机的总体构成
1)牵引机架通过与拖拉机牵引杆铰接,由拖拉机拉动机器进行土地平整;牵引架上设计了调节螺杆与机架连接,调节螺杆控制牵引架与机架的角度,调整平地铲的入土角。
2)机架部分用方管与侧板和铲壁焊合,铲刀通过沉头螺栓连接在固定板上,固定板焊接在铲壁上并焊上槽钢加强刚度;机架与牵引架的铰接板加工3个通孔来调节牵引机架位置。
3)设计的减震平台安装在机架横梁中间位置,平台上固定梯形的桅杆支架;电器箱安装在支架中,电动桅杆固定在支架上。
4)抬铲机构运用杠杆原理设计成省力机构,两个抬铲机构分别铰接在机器两侧,上端和机架横梁铰接,下端铰接在平地铲铲壁上;下端铰接点翘板前端焊接三角钢块当做翘板的翘点。
5)机架与牵引架处设计了斗门机构,运用四杆机构的运动原理,通过电动伺服缸伸缩控制其张开闭合。
1.2工作原理
平地机工作原理简图,如图2所示。
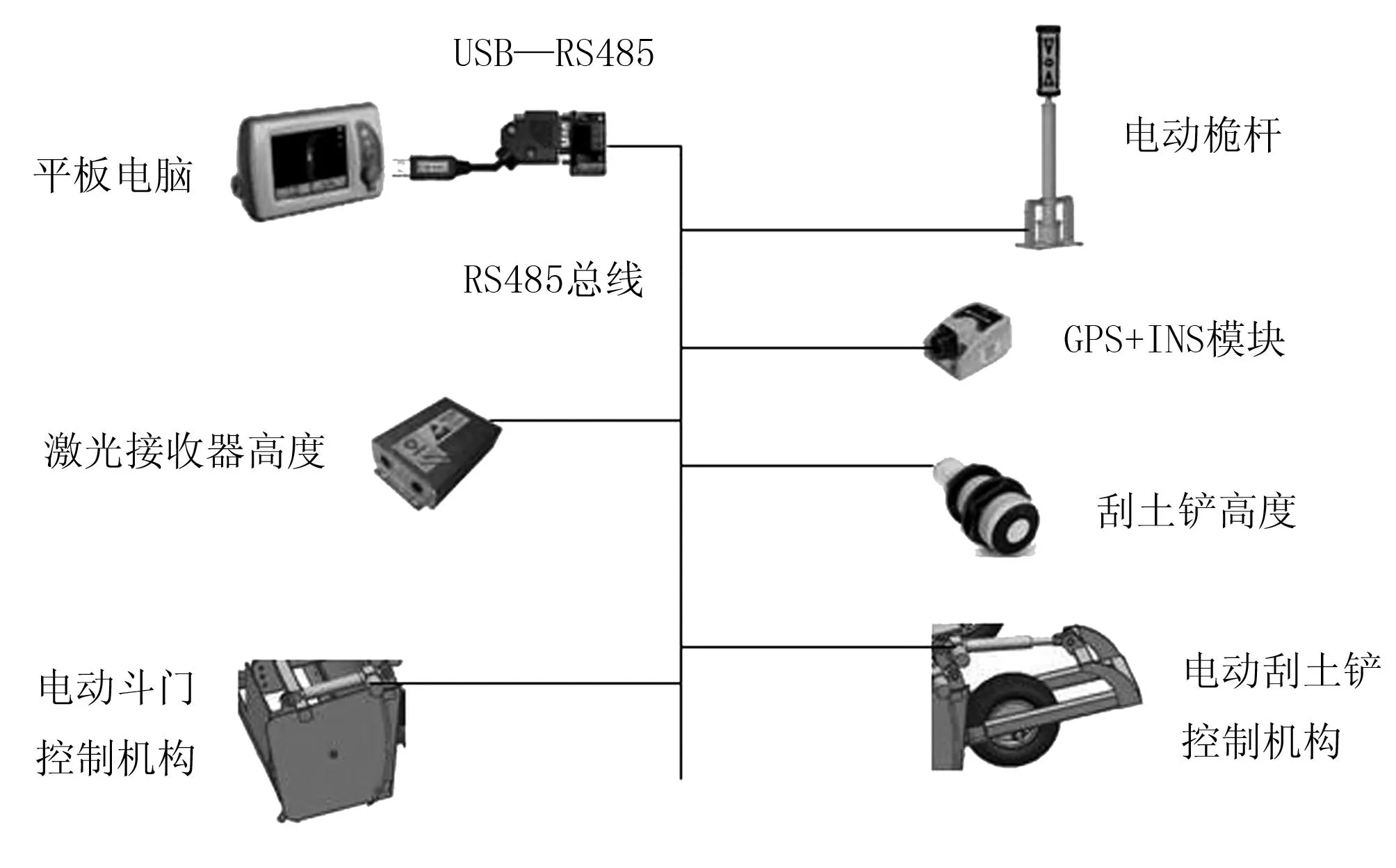
图2 全电农用激光平地机测控拓扑
在田块适当的位置上放置激光发射器,保证激光束的平面高于地表的任何障碍物,以便安装在电动桅杆上的激光接收器能够接受到发射器发射的光束[9-10]。平地机工作前,在所要平整的田块选择多处采样点,通过与平地机连接的超声波测距仪器采集数据,计算出田块的平均高程值;根据平均高程值,调节电动桅杆的高度,定位激光接受器的位置。
平地机工作时,控制系统借助激光平面来调节平地铲的工作姿态[11],进行土壤的推移运送,完成整个田块的平整。平地机的工作原理实际就是对土方搬运及填充并改善田块中的土壤的分布。拖拉机行进到较高地势时,电动桅杆上的激光接受器接受的激光光束位于中心点下方,控制系统采集到信息,控制抬铲机构中的电动伺服缸收缩;电缸收缩带动后轮抬起,平地铲位置下降,斗门机构中的电缸则伸长,斗门闭合。此时,平地铲壁、斗门机构与地表构成铲斗,土壤累积在其中,平地机对地势高的地方高于平均高程的土方进行搬运;拖拉机进行到地势低的地方时,激光接受器接受的激光光束位于中心点上方,控制系统控制抬铲机构电缸伸长,后轮落地,平地铲位置升高,斗门机构的电缸收缩使斗门张开,囤积在铲斗中土壤随着斗门的张开落下;整个过程中,地势高的地方的土壤被带到了地势低的地方,完成了土壤的搬运及填充。
1.3斗门机构的总体设计
斗门结构如图3所示。
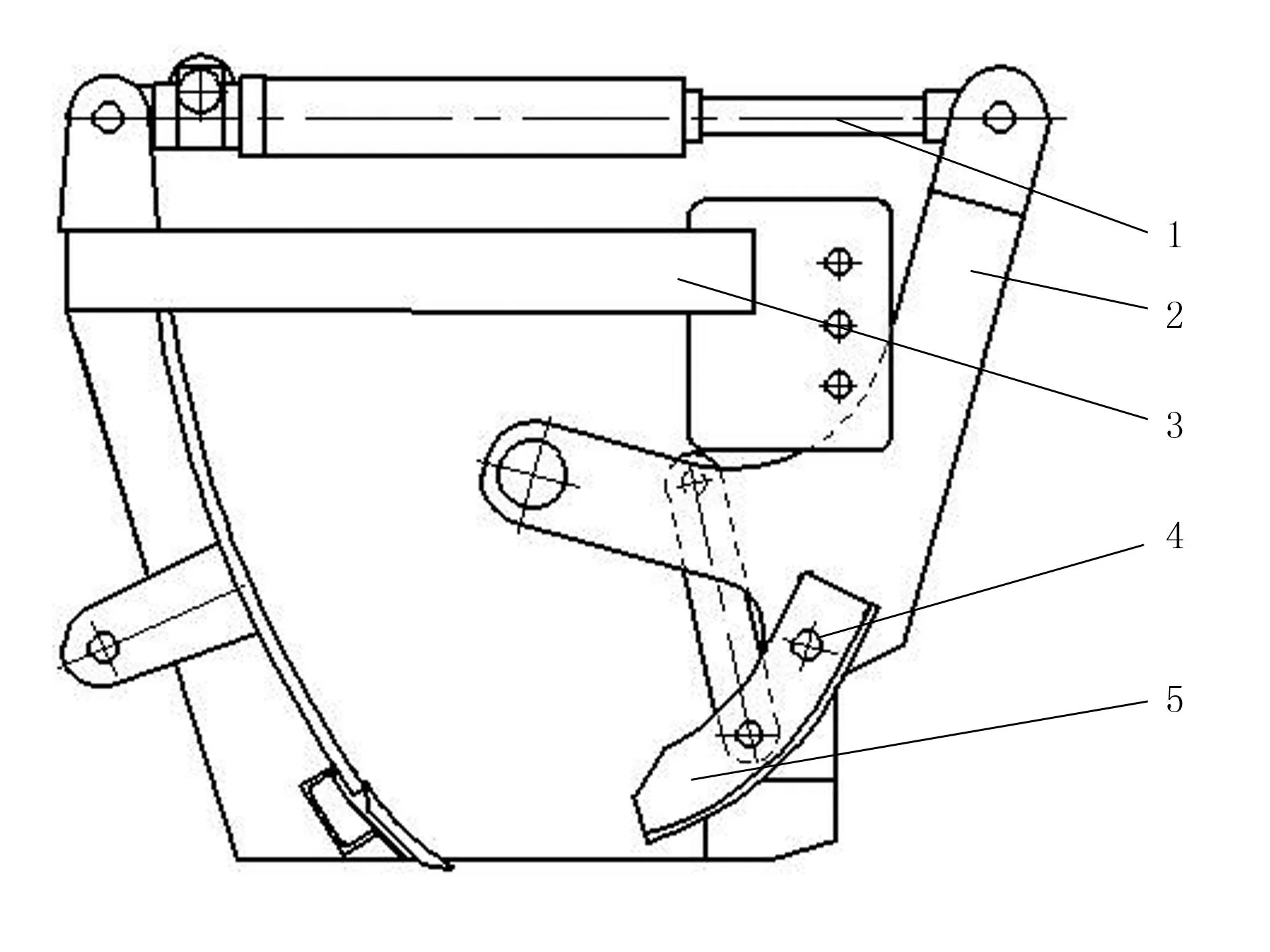
1.电动伺服缸 2.上斗门焊接 3.机架 4.下斗门限制杆
作业时,激光接受器接受激光信号,平地铲落下时,斗门机构闭合,将该地多出的土方存放在斗门和铲壁之间;平地铲抬起时,斗门机构就会打开,将存放的土方填充到地势较低的地方。斗门机构主要由3部分组成,分别是上斗门焊接,下斗门焊接和下斗门限制杆。3部分铰接点均由销轴链接,上斗门焊接与电动伺服缸铰接,控制系统控制电缸的伸缩完成斗门机构的张开与闭合运动。上斗门焊接一端和电缸连接一端铰接在侧板上,下端连接在下斗门焊接上,在工作时绕着侧板上的铰接点进行摆动。下斗门限制板一端铰接在侧板上,上端连接在上斗门焊接上,工作时限制下斗门的运动,保证斗门机构和铲壁的配合。其主要技术参数如下:
平地幅宽/mm:3 000
平地铲的起落范围/mm:-200~+200(理论)
下斗门端点与铲刀下端点的距离范围/mm:高度110~240(理论),水平100~720(理论)
电源/kW·h-1:240
配套动力/kW·h-1:110kW以上的拖拉机
2斗门机构的执行机构和驱动器
2.1电动伺服缸的设计
2.1.1电动伺服缸的结构
电动伺服缸是斗门机构的执行机构,其结构如图4所示。
电动伺服缸主要由前耳、直流电机、蜗轮蜗杆减速器、滚珠丝杆及后耳组成。
前耳通过螺纹连接在推杆上,由推杆上的自锁螺母定位。推杆和滚珠丝杠连接,滚珠丝杠两侧装有防转杆,推杆上固定了小型轴承,防转杆中心开有导槽,轴承与导槽滚动连接。直流电机与蜗轮蜗杆减速器用法兰盘固定在电缸外壳。后耳通过内六角螺栓连接在电缸外壳上。
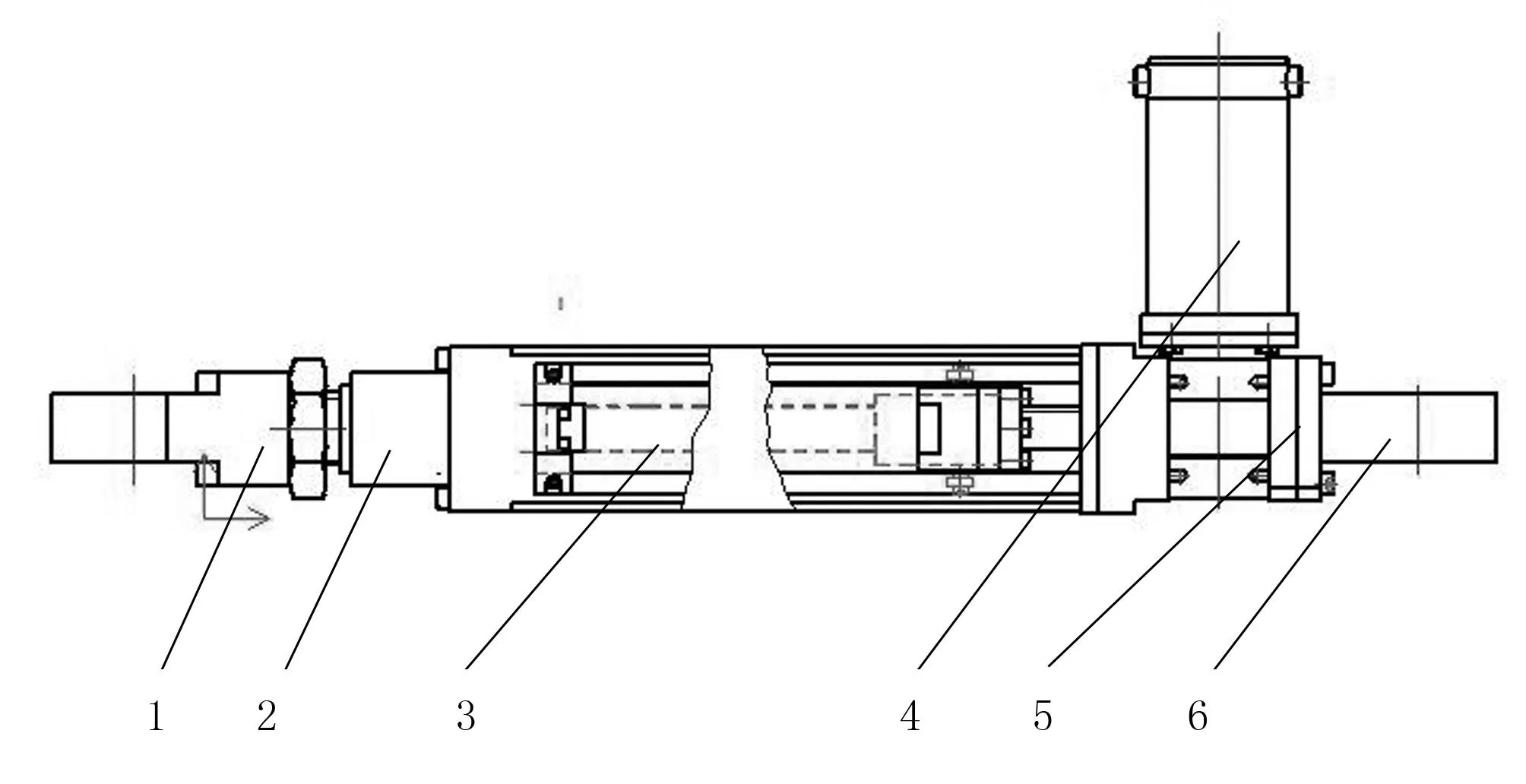
1.前耳 2.推杆 3.滚珠丝杆 4.直流电机
2.1.2电动伺服缸的工作原理
接通直流电源,直流电机转动,经过蜗轮蜗杆减速器的减速,带动滚珠丝杠转动;滚珠丝杠作用于推杆上,推杆两侧的轴承在防转杆导槽中滑动,推杆稳定伸长,推杆同样推动前耳向前伸长。在丝杠运动到极限位置时,推杆上的磁铁靠近安装丝杠螺母和放转杆左侧的磁性开关,常开状态的磁性开关闭合,电机停止转动,滚珠丝杠也停止运动,对电缸的两个极限位置进行保护。
2.1.3电机的选择
一般土壤的密度多在2.6~2.8g/cm3范围内。机器工作时,满载的土壤按土壤密度为2.8g/cm3计算大约是12 000N,斗门机构的质量大约是2 300N,总体就是14 300N。斗门机构斗门机构由电动伺服缸驱动,电动伺服缸采用蜗轮蜗杆直流减速电机。
所选择蜗轮蜗杆减速电机的型号:
额定功率为100W,空载转速为33r/min,额定电压为DC24V,输出扭矩为220kg·cm,额定电流为6.5A,质量为3.6kg,减速箱减速比为1∶30。
电动伺服缸工作时用电机带动滚珠丝杠,施加扭矩时产生推力,计算公式为
式中Fa—产生的推力(N);
η—进给螺杆的正效率;
T—驱动扭矩 (N·mm);
ι—进给螺杆的导程(mm)。
电动伺服缸的驱动扭矩为T=21 560N·mm进给螺杆的正效率为η=0.96,进给螺杆的导程为ι=10mm。
产生的扭矩为
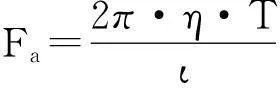
电动伺服缸所能产生的推力是12 998N,斗门机构的由两个电缸驱动,而满载的土壤和斗门的质量一共约14 300N,两个电缸推力近26 000N,驱动斗门的运动留有很大的余量。
2.1.4电缸的进给速度
电动伺服缸的滚珠丝杠选用导程为10mm的型号。电机的转速为33r/min,滚珠丝杠螺母每分钟前进的距离330mm,电缸的进给速度即为5.5mm/s。
2.2斗门机构的驱动原理
平地机在工作过程中拖拉机会一直前进,而在地势高的地方闭合斗门、地势低的地方张开斗门需要控制系统及时响应,短时间内完成机构一个工作行程,要求电动伺服缸能在短时间内响应,来完成电机的正反转和速度的调节。
斗门机构选用直流电机驱动器来控制电动伺服的运动。直流电机驱动器可完美地控制电机启动、制动、换向过程和堵转保护;电机响应时间短,且反冲力小;输出电流实时监控防止过流,有效保护电机和驱动器;可通过拨码开关或串口配置电机额定电流,使电机启动、制动、堵转电流均限定在电机额定电流范围以内,高效而安全。
选用的直流电机驱动器的型号的参数:
额定电压/V: 24
最大输出功率/W:240
外形尺寸/cm:13.6×8.2×4.5
拖拉机自带的蓄电池是整机的动力,一般拖拉机电池为12V,直流电机驱动器的额定电压是24V,需要直流升压器升压保证驱动器的正常工作。驱动器安装在电器箱内,电器箱位于电动桅杆支架下端,驱动器由驾驶室内的平板电脑控制。
3调平装置
传统的激光平地机抬铲的车轮部分一般都是两车轮安装在一个公共的轴筒上。机器工作时,液压执行机构作用在轴筒上,而这种方式在平地机出现侧偏时,机构不及时调节平地铲的水平,在这种状态下平地机整地后地表会出现锯齿状,对作业精度有很大的影响。
本机的抬铲机构是两个相对独立的机构,可以由电动伺服缸分别控制,在机架横梁上安装了小型的惯性导航模块,能够感应到机器的水平度和俯仰角,将采集的信息通过线路传递给平板电脑在由其分别控制两个抬铲机构对平地铲进行调整,保证机器的水平度。
4结论
1)全电的农用激光平地机能够满足传统液压驱动的激光平地机的工作需求。
2)设计的农用激光平地机首次将液压驱动改成电驱,对农田的平整精度比液压驱动的激光平地机有较大的提升,平地效率也有较大的提高。
3)斗门机构的设计改善了传统平地机对土方的搬运填充能力,对更复杂的地形有了更强的适应能力,延长了机器的使用寿命,实现了农田的高精度平整。
参考文献:
[1]贾文涛,刘刚,汪懋华.激光平地技术在土地开发整理中大有可为[C]//土地利用的城乡统筹和区域统筹——2007中国科协年会8.3分会场论文集,2007:770-776.
[2]高韶坤,弋景刚,刘江涛.农田平地机的应用现状与发展趋势[J] ,安徽农业科学,2012,40(5):3034-3035.
[3]付三玲,韦志仁,张伏,等.激光技术在农业上的应用及趋势[J],农机化研究,2006(8):64.
[4]杨柯,胡志超,于昭洋.新型激光平地机研究与发展[J].中国农机化学报,2014, 35(2): 17-19, 37.
[5]艾建军,杨英芸,高韶坤.我国农田激光平地机的研究进展及发展趋势[J].东北农业大学学报 2013,44(11): 155-160.
[6]杨红帆,肖丽晶,赵军,等.1PJ-3 型激光平地机的设计[J].黑龙江八一农垦大学学报,2002,14(1):47-50.
[7]韩豹,韩许,付雅琴,等.IPJY-6 型激光平地机[J].现代化农业,1996(10): 31-32.
[8]坎杂,田学艳,江英兰,等.农用激光平地机的应用现状及其发展前景[J].农业机械学报,2001(5):126-127.
[9]崔金福,刘信忠,刘煜.激光平地技术及其在垦区应用简况[J].现代化农业,2001(9):36-37.
[10]苏焱,王永辉.JGP-2500型激光平地机工作机理研究[J].农业科技与装备,2012(6):36-37.
[11]Ward, Carter J Springston, Preston S Field Trials of Laser Surveying and of Experimental Earthmover Blade Control Kit[C]//SAE Preprints,1977.
Design of the Scraper Mechanism of All-electric Farm Laser Landscraper
Qi Junteng, Diao Peisong ,Ma Mingjian, Li Teng
(College of Agricultural Engineering and Food Science,Shandong University of Technolog, Zibo 255049,China)
Abstract:Farmland grade is a kind of high speed, high precision and multi-purpose machinery,and is the key equipment infarmland improvement construction,it shows special advanced technology in farmland leveling.For the problem of the existing farm laser grader's poor adaptability to the complex terraing and using the fine-machine as coarse-machine, this article designed an all-electric farm laser landscraper.The existing laser landscraper's work efficiency for the first time in the field of complicated topography is low.The large amplitude in the work process usually makes the mast be easily broken.The oil temperature in the hydraulic actuator will be too high while the landscraper working in a long time , and the hydraulic cylinder will appear an overshoot phenomenon. These phenomenons have a great influence on the grader leveling precision. The all-electric farm laser landscraper improved and innovated for the traditional landscraper .This has great significance for the improvement of the grader leveling precision.The all-electric farm laser landscraper is mainly composed of frame, electric servo-cylinder , the laborsaving agency of lifting the shovel,the scraper mechanism.The scraper mechanism of laser landscraper is mainly composed of driving system, control system and mechanical parts.The scraper mechanism can be using to move the soi.Field experiment results showed that this agency can improve the leveling precision compare with traditional models when it works in the complex terrains.The operation quality meet the need of the agronomic requirements.The agency is designed reasonable.
Key words:electric servo-cylinder; laser landscraper; scraper mechanism
文章编号:1003-188X(2016)05-0148-04
中图分类号:S222.5+1
文献标识码:A
作者简介:齐俊滕(1990-),男,山东济宁人,硕士研究生,(E-mail)489500518@qq.com。通讯作者:刁培松(1962-),男,山东淄博人,教授, (E-mail)dps2003@163.com。
基金项目:山东省自主创新项目专项子课题(2013CXC90203)
收稿日期:2015-04-08