基于牛蒡自动播种机的UG仿真
2016-03-23马俊生王一羽季文静韦尚顶黄世坚
马俊生,王一羽,季文静,韦尚顶,黄世坚
(广西大学 机械工程学院,广西 南宁 530004)
基于牛蒡自动播种机的UG仿真
马俊生,王一羽,季文静,韦尚顶,黄世坚
(广西大学 机械工程学院,广西 南宁530004)
摘要:针对我国主要人工播种牛蒡存在的问题,在现有牛蒡种植方法的基础上,研发一种播种质量高、能耗低、可以广泛应用于牛蒡机械化种植的牛蒡自动播种机。为此,介绍了牛蒡播种机的工作原理,并运用三维软件UG进行运动学分析,真实再现了牛蒡自动播种机的工作状况。结果表明:牛蒡自动播种机能够满足实际工作要求。
关键词:牛蒡;自动播种机;三维软件;仿真
0引言
我国在 20 世纪 80 年代从日本引进牛蒡,现已在山东、江苏、安徽、黑龙江等地大面积种植。牛蒡根、茎叶、果实(牛蒡子)均可供药用。牛蒡子是一种传统中药,味辛、苦、寒,归肺、胃二经,具疏散风热、宣肺透疹、消肿解毒之功效;用于风热感冒、咳嗽痰多、咽喉肿痛、斑疹不透、风疹作痒及痈肿疮毒等症。牛蒡叶多作外用,有明显的消炎、解毒、镇痛作用。目前,牛蒡根在日本和欧洲作为蔬菜上市。
我国是农业大国,拥有较为成熟的种植技术,但在实际生产中,农业机械化程度较低。为此,在现有牛蒡种植方法的基础之上,提出了一种牛蒡自动播种机,能够实现播种不同长度、不同品种的牛蒡种子,且可自动筛选出一颗种并自动播种,播种成功率达90%以上。因此,牛蒡自动播种机具有极大的推广价值。
若对牛蒡自动播种机的研究是通过类比或经验得出,则这种传统方法具有一定的盲目性和局限性。因此,需要采用更为科学合理的设计方法,并为牛蒡自动播种机的生产和制造提供更加有效的参数。本文通过三维软件UG建立牛蒡自动播种机的三维模型,真实再现了牛蒡自动播种机的工作状况,并对播种机进行了运动学分析和三维仿真。此方法可对提高牛蒡自动播种机的寿命、加工精度和降低制造成本提供参考。
1整机结构及工作原理
牛蒡自动播种机主要由铅蓄电池、电动机、动力传动部分、行走机构、筛种机构和播种机构等组成,如图1所示。

1.皮带轮1 2.皮带 3.皮带轮2 4.主动轮 5.分土犁
传动部分由皮带轮1、皮带、皮带轮2将电动机提供的动力传递至传动轴1。如图2所示,传动轴1一方面带动主动轮转动实现牛蒡自动播种机的行走;另一方面带动皮带轮3,通过传动带、皮带轮4、传动轴2、齿轮组将动力传递给传动轴3;传动轴3带动筛种器转动实现筛选牛蒡种子并播种。
2土壤质点的运动规律分析
2.1土壤质点速度
分土犁(见图3)的工作过程是松动土壤,并在土壤中形成一道沟壑,便于牛蒡种子的播种。现以位于分土犁刀尖处的土壤质点A为研究对象,分土犁以前进速度v前进行向前运动,泥土分别以速度v排1、v排2沿分土犁两侧排出。质点速度如图4所示。

1.皮带轮4 2.齿轮组 3.传动轴3 4.传动带 5.皮带轮3

图3 分土犁的结构图
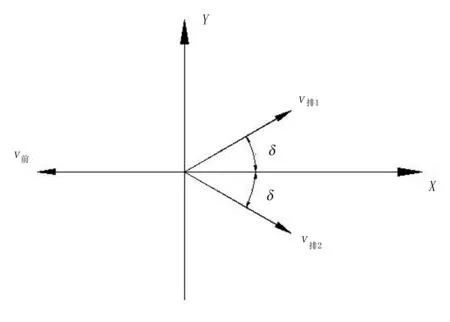
图4 土壤质点的速度图
式中v前—分土犁向前运动速度(m/s);
v排1、v排2—泥土排除速度(m/s);
δ—v排1、v排2与水平线的夹角(°)。
2.2土壤质点的加速度
土壤质点在松土过程中位于匀速向前的分土犁的两侧,且相对于分土犁两侧相对滑动,加速度如图5所示。根据运动学知识,绝对加速度等于牵连加速度与相对加速度的矢量和,则
式中aa—绝对加速度;
ae—牵连加速度;
ar—相对加速度。
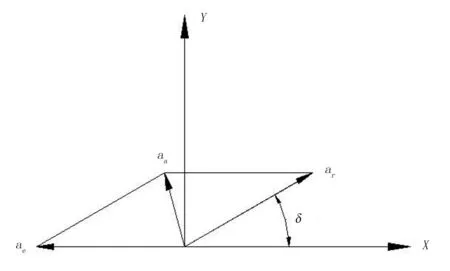
图5 土壤质点的加速度图
2.3土壤质点的力学分析
以分土犁叶片上任意质点作为研究对象,其受力如图6所示。

图6 受力图
图6中:G为土壤质点的质量;N为分土犁上的法向压力;F为土壤质点受到的惯性力。
3牛蒡自动播种机的运动学分析
3.1牛蒡自动播种机的三维模型
要进行播种机的运动学分析,需对播种机建立三维模型。牛蒡自动播种机主要由铅蓄电池、电动机、动力传动部分、行走机构、筛种机构和播种机构等组成。在三维软件Inventor中建立播种机的模型如图7所示。
3.2创建驱动条件
在牛蒡自动播种机中,只有一个动力源。其传动轴的动力角加速度为ω1 = 270°/s;驱动条件如图8所示。

图7 牛蒡自动播种机的三维模型

图8 牛蒡自动播种机的驱动条
3.3运动仿真的解算方案
经UG基于运动学与动力学的综合分析,确定好重力常数的大小和方向,确定好解算方案,如图9所示。
3.4分土犁运动仿真的解算结果
经UG运动学分析,分土犁刀尖位置位移图如图10 所示,分土犁刀尖位置的速度图如图11所示。
由运行的结果分析可得:分土犁刀尖位置的运动为匀速直线运动,其速度为896mm/s。
3.5播种器运动仿真的解算结果
经UG运动学分析,以播种器的某一凹坑作位置跟踪,其位移图如图12 所示; 播种器的角速度如图13所示。
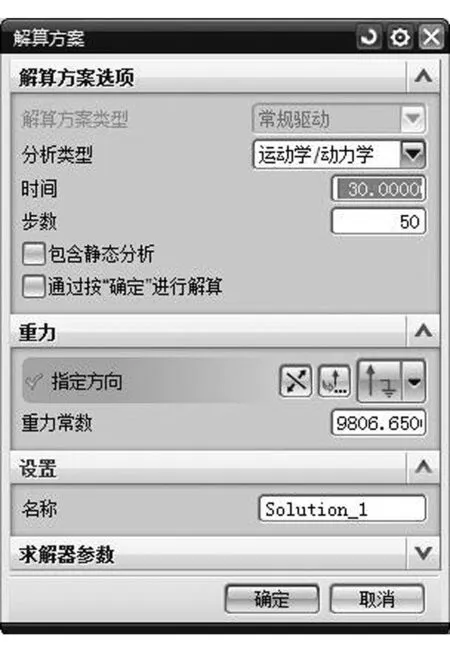
图9 牛蒡自动播种机的解算方案
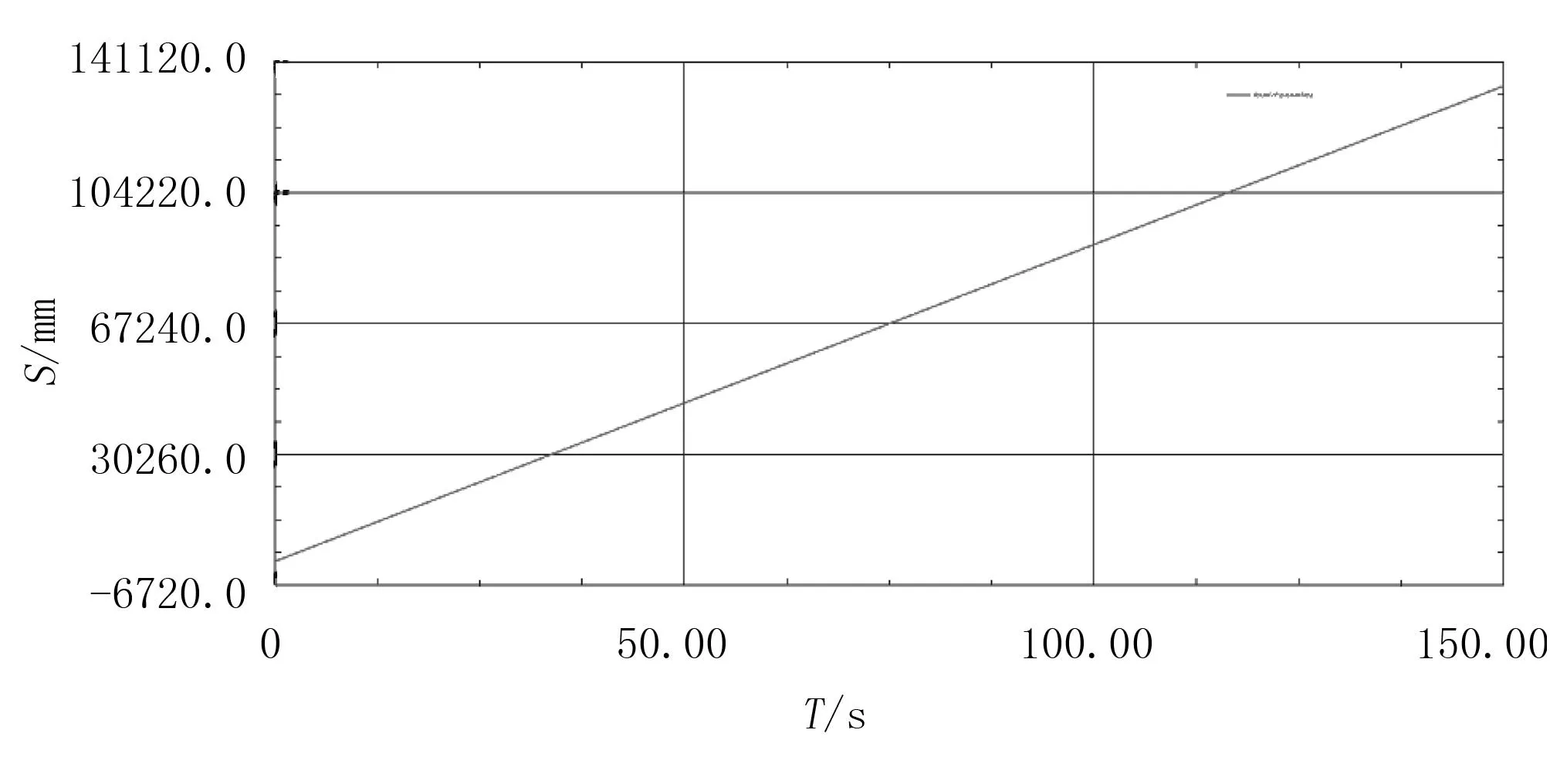
图10 分土犁刀尖位置的位移图

图11 分土犁刀尖位置的速度图
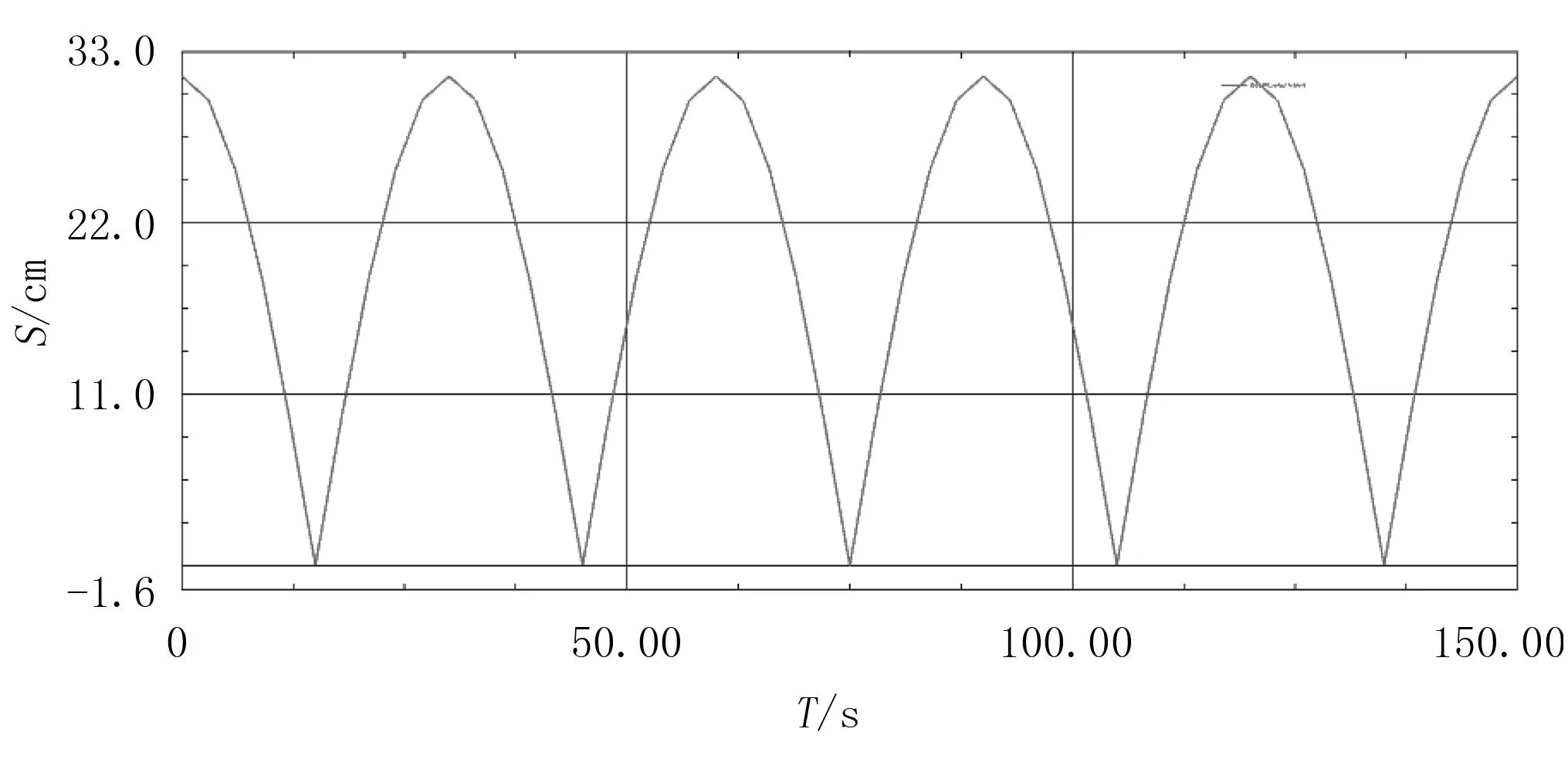
图12 播种器的某一凹坑位移图

图13 播种器的角速度图
由运行的结果分析可得,播种器的运动为匀速转动,其速度是172(°)/s。
4结论
1)三维仿真软件UG 真实再现了牛蒡自动播种机的工作工况。
2)牛蒡自动播种机能够满足工作要求。
参考文献:
[1]郑广平,覃海英,娄玉印.基于新型植树挖坑机的Pro/E仿真[J].农机化研究,2013,35(6):73-76.
[2]徐传芬.牛蒡的研究现状[J].天然产物研究与开发,2005,17(6):818-821.
[3]杜韧强,康尔艳,李良玉.牛蒡种植新技术[J].新农业,1997(11):13-14.
[4]梁德建.在牛蒡种植中推广机械化深松技术[J].中国农机化,1995,28(6):26.
[5]丁旭东,袁双喜.Autodesk Inventor运动仿真模块基础[J].CAD/CAM与制造业信息化,2014(11):57-5.
[6]黄伟,娄玉印,韦宁,等.行走式植树挖坑机的工作原理及结构分析[J].农机化研究,2013,35(2):35-39.
[7]濮良贵,纪名刚,陈国定,等.机械设计[M].北京:高等教育出版社.
UG Simulation Based on Burdock Automatic Seeder
Ma Junsheng, Wang Yiyu, Ji Wenjing, Wei Shangding, Huang Shijian
(School of Mechanical Engineering,Guangxi University,Nanning 530004,China)
Abstract:In view of our country mainly adopts artificial planting burdock, on the basis of the existing burdock planting methods,developing a planting high quality,low energy,consumption can be widely applied to burdock burdock mechanization planting automatic seeder.This paper introduces the working principle of the burdock seeder and kinematics analysis was carried out on using 3 d software UG,burdock automatic seeder real work condition.The results show that the burdock automatic machine can satisfy the working requirements.
Key words:burdock automatic seeder; three-dimensional software; simulation
文章编号:1003-188X(2016)05-0048-04
中图分类号:S223.2+6
文献标识码:A
作者简介:马俊生(1994-),男(壮族),南宁人,硕士研究生,(E-mail)460399160@qq.com。
基金项目:广西大学国家级大学生创新创业训练计划项目(141059301)
收稿日期:2015-04-28