整秆式甘蔗收割机集堆装置重力自卸机构设计与仿真
2016-03-23黄世醒杨丹彤
何 霖,黄 峥,黄世醒,杨丹彤
(华南农业大学 南方农业机械与装备关键技术省部共建教育部重点实验室,广州 510642)
整秆式甘蔗收割机集堆装置重力自卸机构设计与仿真
何霖,黄峥,黄世醒,杨丹彤
(华南农业大学 南方农业机械与装备关键技术省部共建教育部重点实验室,广州510642)
摘要:甘蔗集堆是整秆式甘蔗收割的重要环节,其集堆的效率及集堆效果影响整秆式甘蔗收割机的工作速度。为此,提出一种基于重力自卸的甘蔗集堆机构,运用三维软件Creo对集蔗装置重力自卸机构进行三维建模,并运用Adams对自卸机构进行运动学仿真分析,验证机构设计的正确性与可行性。
关键词:整秆式甘蔗收割机;集堆装置;重力自卸机构;仿真分析
0引言
甘蔗集堆是整秆式甘蔗收割机的重要环节,主要作用是收集甘蔗并将甘蔗摆放成堆,为进一步打捆创造条件,实现收集甘蔗和卸载甘蔗两个功能[1, 2]。由于甘蔗是长茎秆作物,集堆有方向性,若外力过大时折断将会造成损失。部分地区由于甘蔗生产过程中倒伏严重,会导致收获时甘蔗弯曲非常显著,给集堆带来困难。按照集堆原理,集堆可以是按体积、按质量或按时间来进行操作;按卸载时机器行走是否暂停,可分成间歇式和连续式。目前,集堆打捆装置的性能已经成为整秆式甘蔗收割机的瓶颈问题。在甘蔗收获环节,集堆打捆的工作量约占整个甘蔗收获过程的10.9%。因此,设计适用的集堆装置,对于提高整秆式甘蔗收割机的工作效率及降低甘蔗收获的劳动强度都具有较大的意义[1, 3]。
1现有整秆式甘蔗收割机集堆装置分析
目前可见的整秆式甘蔗收割机上的集堆装置从外观上看主要有3种,如图1所示。图1(a)、(b)为1种,都是通过1块带阻挡板的圆弧承接板集堆,集堆到一定程度,通过手动液压控制,侧向翻转圆弧承接板,实现卸载;图1(c)则是通过一个外挂的箱体,承接甘蔗,也是集堆到一定程度,通过手动液压控制,将外挂箱体底板中缝对开,实现卸载;图1(d)是甘蔗侧立于前收割台的收集筐中,集堆到一定程度,通过手动液压控制,侧向开启收集筐侧门,甘蔗侧向倾倒,实现卸载。
从原理上看,这3种装置没有本质区别,都是通过收集甘蔗,人工判断是否卸载;通过液压控制液压缸,控制装置倾倒或门的开闭,实现卸载。

(a) 浙江三佳整秆式甘蔗收割机

(b) 河南坤达整秆式甘蔗收割机

(c) 广西汉森整秆式甘蔗收割机

(d) 广西农机院整秆式甘蔗收割机
3种装置的卸载动力属于被动式,都是靠重力作用。因此,在收割机行走速度较快时,甘蔗是铺放于地面,而不是堆在地面的;3种装置相对而言,图1(d)铺放效果会更加明显,图1(c)集堆效果会相对好一些。图1(a)、(b)的优点是,在卸载过程中,不会出现由于后续甘蔗阻挡,造成卸载门闭合不严的问题。3种装置在实际应用中都存在装置庞大、集堆效果不理想及卸载受阻等问题,影响工作效率[3-4]。
2重力自卸机构的结构设计和原理分析
2.1重力自卸机构的结构设计
根据上文分析,设计了一种新的重力自卸机构。该机构无需外界动力介入,当装置收集到的甘蔗质量达到设计质量时,在甘蔗重力和弹簧拉力作用下卸载和恢复初始状态。重力自卸机构设计如图2所示。
2.2重力自卸机构原理分析
甘蔗通过整秆式甘蔗收割机飞出落在集蔗板上,集蔗板自身重力和甘蔗重力将产生一个绕旋转轴的顺时针扭矩,拉伸弹簧AE、BD预紧力产生绕旋转轴逆时针方向的扭矩;卸载前两扭矩平衡。当集蔗板上甘蔗达到一定数量,两根拉伸弹簧产生的扭矩将不能平衡甘蔗和物料板重力产生的扭矩而使集蔗板绕旋转轴顺时针旋转;若物料增加到弹簧AE力作用线刚好通过连接轴与弹簧连接板空间交点时,即卸载角度等于临界角位置处,弹簧AE扭矩将为0,甘蔗由于与集蔗板之间的摩擦仍保持静止状态;当甘蔗继续增加,集蔗板继续旋转,弹簧AE对旋转轴的扭矩不再为0,方向为顺时针方向与零界点前方向相反,即弹簧AE对旋转轴的力矩变为顺时针方向促使集蔗板加速旋转,同时甘蔗在重力作用下沿集蔗板向下滑动,完成自卸动作。在甘蔗完全卸载结束后,由于惯性力矩作用集蔗板仍将保持顺时针旋转至最低点位置。由于弹簧BD对旋转轴逆时针方向扭矩大于弹簧AE和物料板对旋转轴顺时针方向扭矩,物料板因此获得逆时针加速度,逆时针方向加速运动至初始位置,至此完成一次完整自卸过程。
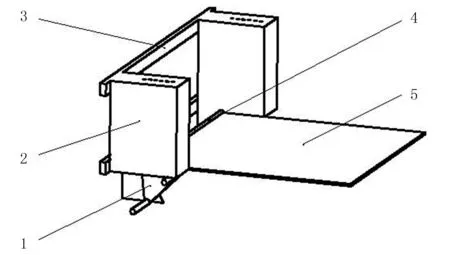
1.弹簧连接板 2.弹簧安装盒 3.固定装置 4.旋转轴 5.集蔗板
3关键部件的设计
重力自卸机构设计主要为弹簧盒相关尺寸设计,包括位置差角α、弹簧板夹角β、集蔗容量设计、弹簧选择[5]及弹簧悬挂位置点的选择几个方面。定义重力自卸机构中相关角度的几何意义如图3所示。
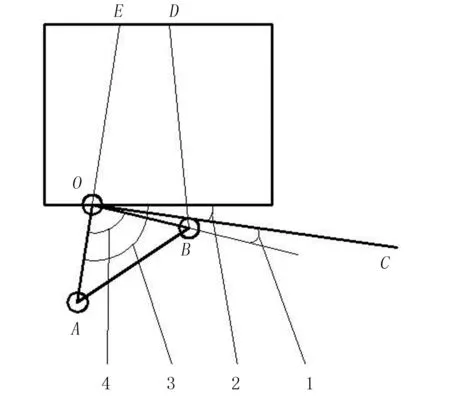
1.α位置差角 2.θ′临界角 3.γ几何角 4.β弹簧连接板夹角
3.1临界角θ′的计算
为保证在不满足卸载的条件下,甘蔗在自身重力和集蔗板静摩擦力的作用下保持静止状态,即甘蔗不会滑落。甘蔗受力如图4所示,要使甘蔗在集蔗板保持静止状态,应满足
u·Fn-Gn·sinδ≥0
Fn=Gn·cosδ
式中u—甘蔗与集蔗板的摩擦因数;
Fn—集蔗板对甘蔗模型的支持力。
推理可得:δ≤arctanu即最大临界角与甘蔗模型质量无关,只与甘蔗和集蔗板之间的摩擦因数相关。参考王美美在单芽段甘蔗种植机排种机理与种植均匀性研究中静摩擦因数的测定,甘蔗与钢板静摩擦因数为u=0.377,带入公式计算可得δ=17.5°。在设计集蔗机构时应保证临界角小于δ=17.5°,从而保证甘蔗在收集过程中卸载前不会滑落。
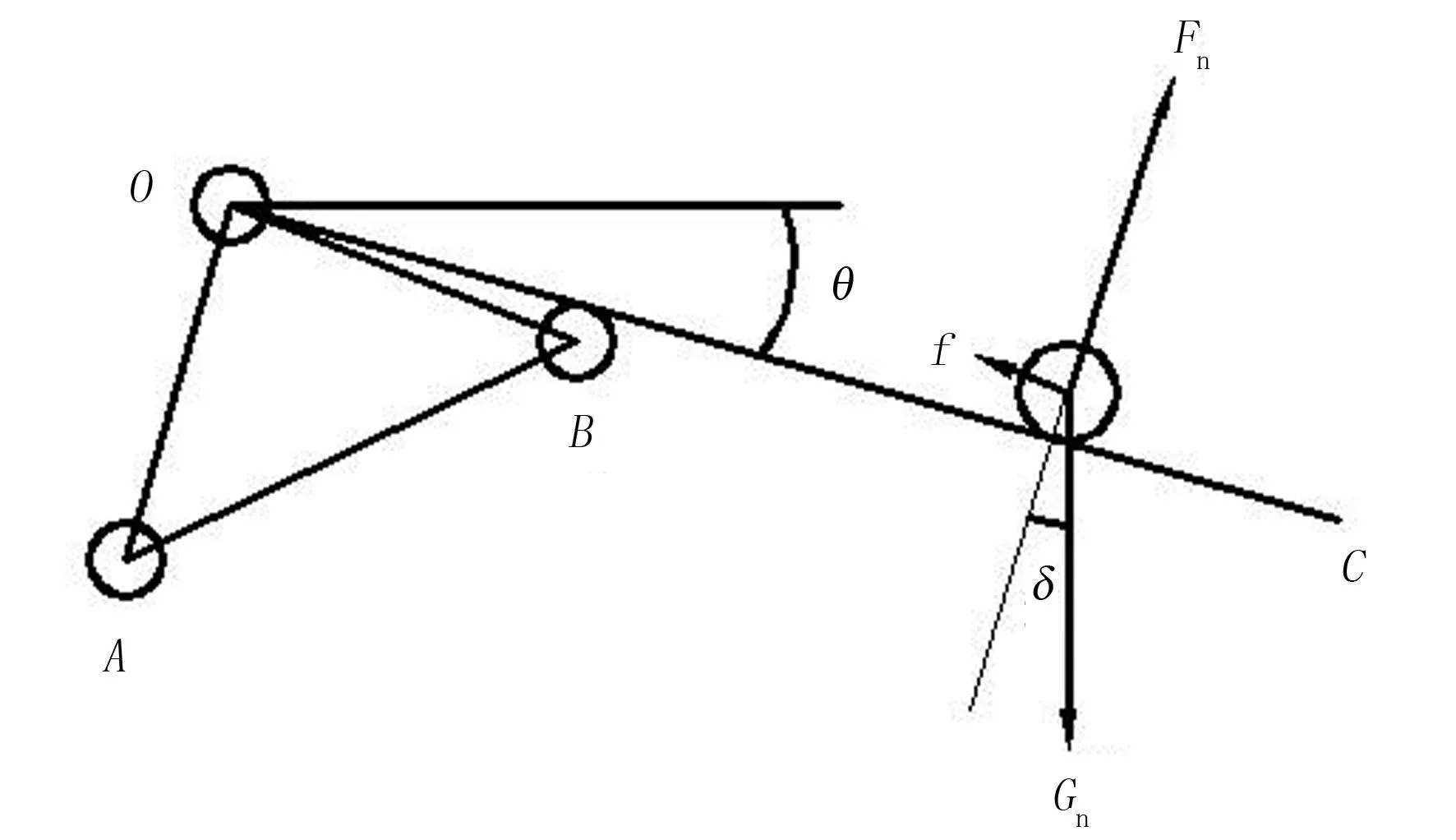
图4 甘蔗模型受力分析图
3.2位置差角α和弹簧板夹角β
弹簧连接板主要连接集蔗板和弹簧。当集蔗机构中弹簧的连接点位置确定后,几何角γ和弹簧板夹角β也都确定,位置差角的主要作用是减小临界角θ′,使集蔗装置在满足卸载的条件下,能使集蔗板快速地通过临界点位置完成卸载过程。则
γ=θ′+α+β
式中γ—几何角;
θ′—临界角;
α—位置差角;
β—弹簧板夹角。
机构尺寸确定后,弹簧板夹角β和几何角γ固定不变,适当的增加位置差角α可减小临界角θ′,位置差角α值也不宜太小。根据机械设计相关经验弹簧板夹角应选择较大的值,选取弹簧板夹角β=85°,位置差角α=5.74°。根据弹簧盒设计,γ=100°计算可得θ′=9.26°小于δ=17.5°,即保证了甘蔗在收集过程中不会滑落。
4集堆装置机构仿真分析
4.1三维模型的建立
采用三维建模软件Creo建立集蔗装置重力自卸机构三维模型,如图5所示。模型建立完后将其保存为“Parasolid(*.x_t)”类型的文件,将保存的输出文件导入Adams软件。
模型导入Adams软件后进行分析相关设置,主要包括①分析环境的模型的属性、重力方向、计算单位等的设置。②约束添加。机构和大地之间为固定副,集蔗板旋转轴为转动副。③maker点添加。安装弹簧的位置点和测量角度。④连接设置。弹簧和接触添加,甘蔗模型与集蔗板之间有摩擦的连接。设置参数后机构如图5所示。
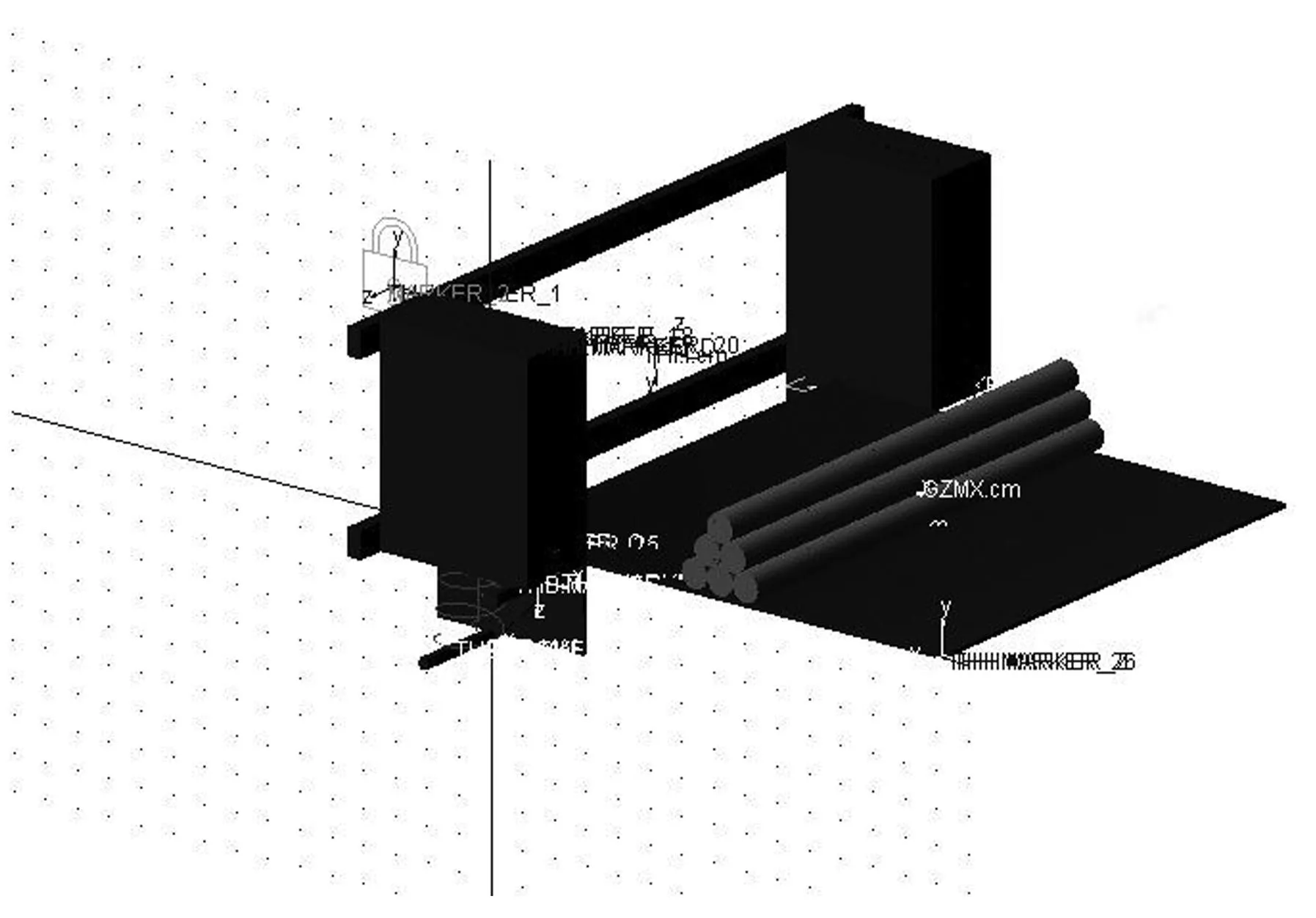
图5 Adams/View集堆装置模型
4.2集堆装置运动学分析
分析完成后,进入ADAMS后处理程序Adams/PostPrcessor,加载分析结果。其输出角度、角速度、弹簧AE、弹簧BD及甘蔗模型质心轨迹的相关参数变化规律如图6所示。
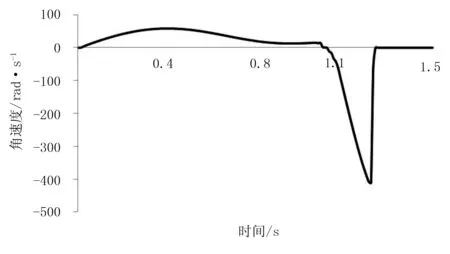
(a) 角速度随时间变化曲线
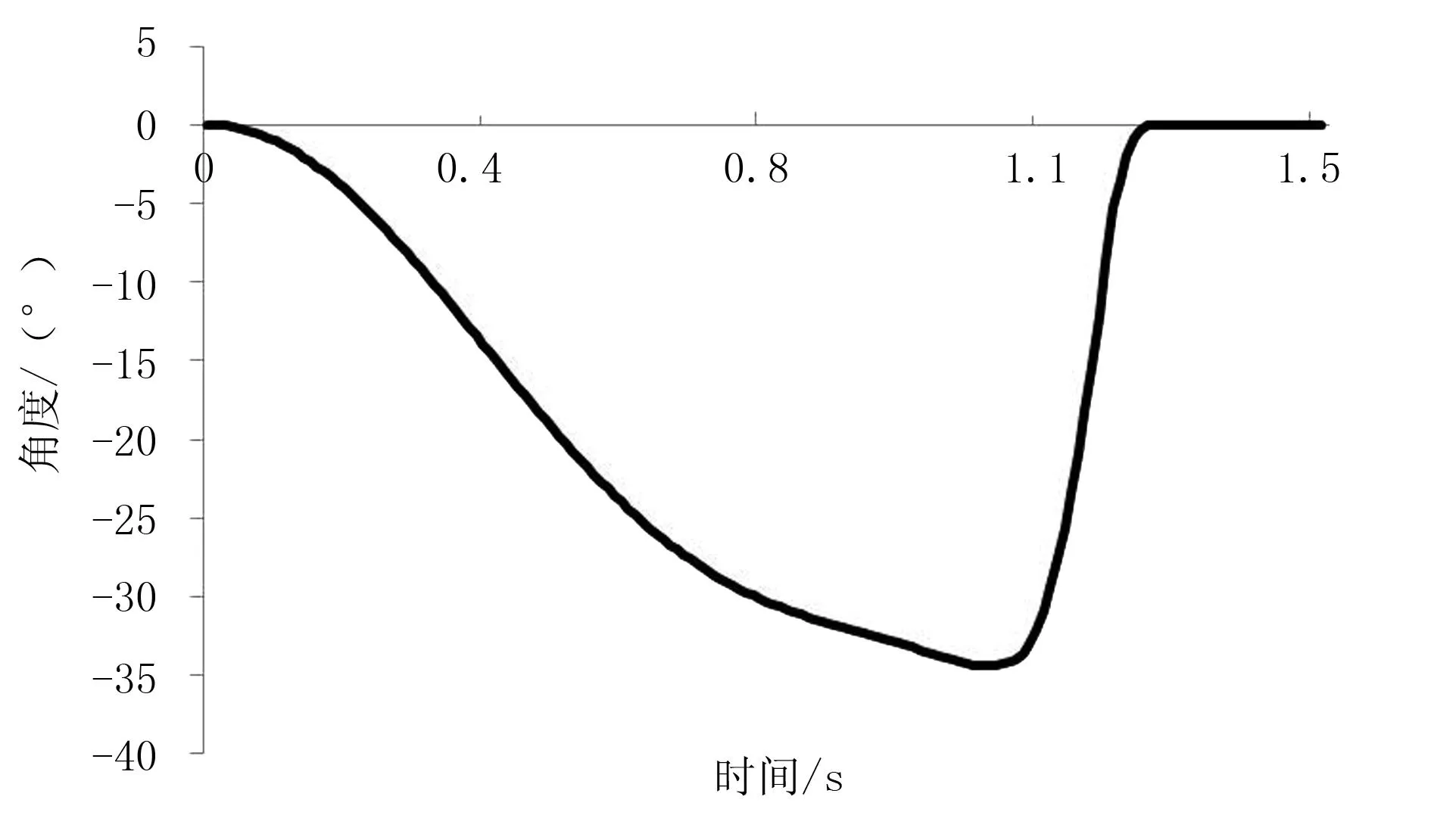
(b) 角度随时间变化曲线
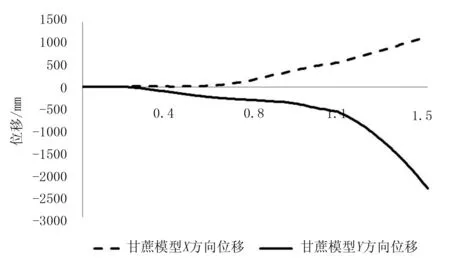
(c) 甘蔗模型质心运动轨迹

(d) 甘蔗质心X方向速度变化曲线
由图6(c)可知:在t=0.32s时,集蔗板到达临界点位置,卸载角(临界角)θ=-9.26°,卸载角速度在临界点处达到最大值56rad/s;甘蔗模型在X方向的位移为12.86mm,Y方向的位移为72.74mm;甘蔗模型从初始状到临界点位置过程中因与集蔗板之间的静摩擦而保持静止,与集蔗板之间无相对运动。
过临界点位置后,甘蔗模型有相对集蔗板运动趋势,甘蔗模型沿集蔗板有相对运动直至离开集蔗板。在此过程中,甘蔗模型对旋转轴的力臂增大,弹簧AE对旋转轴的力矩方向由原来的逆时针变为顺时针方向促进集蔗板顺时针旋转;但弹簧BD力矩变化幅度大于其他力矩变化幅度,集蔗板开始减速至甘蔗模型离开集蔗板。
由图6(d)可知:甘蔗模型质心X方向速度曲线在t=0.98s时出现拐点;0.98s后由于甘蔗模型不受到外力作用物体运动为斜抛运动,所以X方向速度保持不变,卸载角θ=33.1°, 角速度13.6rad/s, 集蔗板并未到达最低点位置;此时甘蔗模型的质心X方向位移为810mm,Y方向位移为410mm。由于甘蔗模型在脱离集蔗板时集蔗板具有运动惯性,甘蔗模型脱离集蔗板后集蔗板仍将保持当前运动趋势。当t=1.05s时到达最低点位置,此时卸载角θ=33.48°、角速度为0rad/s。
到达最低点后,旋转轴受弹簧BD逆时针方向力矩、弹簧AE顺时针力矩及集蔗板顺时针方向力矩。由于弹簧BD产生的力矩,远大于弹簧AE和集蔗板产生的力矩所以集蔗板会迅速通过临界点到达平衡位置。如图6(c)所示:集蔗板在t=1.05~1.25s时,卸载角快速从最大值回到零位置,由于弹簧连接板上设置有卡位装置,限制集蔗板回位后状态为水平位置,所以由图6(a)可知:t=1.25s位置处有转折点,仿真可知碰撞后集蔗板角速度瞬速回复到初始状态。
5结论
1)按照所设计的集堆装置能满足甘蔗的集堆需要,在重力自卸的前提下,可以实现快速自卸,不需要两层结构,自卸时间为1.25s,卸载角度为33.48°。
2)经理论分析,重力自卸结构要很好实现需要满足:卸载临界角θ′小于甘蔗与集蔗板摩擦角δ。
3)经过Adams运动学仿真可以验证集蔗机构具有重力自卸和恢复初始状态的功能,重力自卸机构满足自卸的设计要求。
参考文献:
[1]刘先杰.小型甘蔗联合收割机流程虚拟仿真分析及集蔗机构的改进[D].南宁:广西大学,2006.
[2]李政,李尚平,周建阳.小型甘蔗收获机集蔗机构的设计与仿真[J].农机化研究,2014,36(12):87-95.
[3]麻芳兰,刘海,杨冰心,等.整秆式甘蔗收获机集蔗机构的设计与仿真[J].农机化研究,2013,35(1):94-97.
[4]陈连飞,梁宇达,邹小平,等.连续回转式甘蔗收割机集堆机构设计与试验简[J].现代农业装备,2014(3):30-35.
[5]中国机械工程学会,中国机械设计大典编委会.中国机械设计大典3[M].南昌:江西科学技术出版社,2002:243-279.
Abstract ID:1003-188X(2016)05-0032-EA
The Gravity Dump Mechanism Design and Simulation for the Whole Stalk Sugarcane Harvester
He Lin, Huang Zheng, Huang Shixing, Yang Dantong
(Key Laboratory of Key Technology on Agricultural Machine and Equipment,Ministry of Education,South China Agricultural University,Guangzhou 510642,China)
Abstract:The collecting of sugarcane have a significant mean for whole stalk sugarcane harvesting.Efficiency and effectiveness of collecting affect the entire collection of the whole stalk sugarcane harvester working speed.In this paper, a gravity dump mechanism was presented.Three-dimensional model created by Creo and kinematic simulation analysis completed by Adams,this two steps is to verify the correctness and feasibility of the mechanism design.
Key words:whole stalk sugarcane harvesting; sugarcane collection; gravity dump mechanism;simulation analysis
文章编号:1003-188X(2016)05-0032-04
中图分类号:S225.5+3
文献标识码:A
作者简介:何霖(1988-),男,湖南宁乡人,硕士研究生,(E-mail )rain0803@yeah.net。通讯作者:杨丹彤(1970-),男,广州人,副教授,硕士生导师, (E-mail ) yangdt@scau.edu.cn。
基金项目:公益性行业(农业)科研专项(201003009);“十二五”农村领域国家科技计划项目(2011BAD20B05);国家国际科技合作项目(2011DFB70350);国家甘蔗产业技术体系项目(CARS-20-4-1)
收稿日期:2015-04-07