基于ADAMS马铃薯收获机振动筛的运动特性分析
2016-03-23张天会张永华
果 霖,张天会,王 冉,张永华
(云南农业大学 机电工程学院,昆明 650201)
基于ADAMS马铃薯收获机振动筛的运动特性分析
果霖,张天会,王冉,张永华
(云南农业大学 机电工程学院,昆明650201)
摘要:马铃薯收获机是马铃薯生产过程中一种非常重要的机械,但马铃薯收获机振动筛的运动规律复杂,经常发生伤薯问题。为此,以某型号马铃薯收获机多杆机构的振动筛为研究对象,利用Creo建立了振动筛的参数化模型,并利用ADAMS对振动筛的运动特性进行了分析。通过分析得到振动筛的振幅范围5.5~31.8mm略微超出了最佳范围10~30mm;速度范围105.5~535.2mm/s符合小于600mm/s的最佳要求;加速度范围0.7~18.7mm/s2,其最小值小于最佳取值范围2.5~20mm/s2的下界。利用ADAMS可以准确高效地得到振动筛的运动特性,为振动筛的优化设计提供了理论依据。
关键词:马铃薯收获机;振动筛;ADAMS;运动特性
0引言
马铃薯以其适应性强、产值高、营养丰富等特点,在我国得到了越来越广泛的推广和种植,在国内的消费量也以平均每年8%的速度增长[1]。在马铃薯大量种植过程中,需要有多种相应的机械进行作业,马铃薯收获机就是其中一种。我国马铃薯收获机起步比较晚,虽然发展较快,但是还存在多种问题[2]。振动筛是影响马铃薯收获机收获质量最重要的机构之一,马铃薯常常在振动筛的速度大小、方向突变区及抖动加速强烈区受伤[3]。
马铃薯震动筛多采用四杆机构或多杆机构。多杆机构可以提高马铃薯的分离质量,但其运动特性的分析过程复杂,很大程度上增加了产品研发周期和成本,很难使产品达到最佳效果。
本文针对马铃薯在振动筛抖动运输的过程中容易受伤的问题,以某型号马铃薯收获机多杆机构的振动筛为对象,利用参数化建模软件Creo建立振动筛的三维模型,并利用ADAMS分析振动筛的振幅、加速度等运动特性。
1振动筛模型
本文研究的马铃薯振动筛是由多个连接杆构成的,是一个典型的多杆机构,如图1所示。其中,前挂杆的两端分别与筛架和机架铰接在一起,后挂杆的两端分别与机架和上连杆铰接在一起,上连杆的两端分别与筛架和驱动摇杆铰接在一起,驱动摇杆铰接在机架的一端。振动筛工作时,机架与马铃薯收获机保持相对静止,外部动力带动驱动摇杆转动,进而带动筛架和筛条做周期运动。
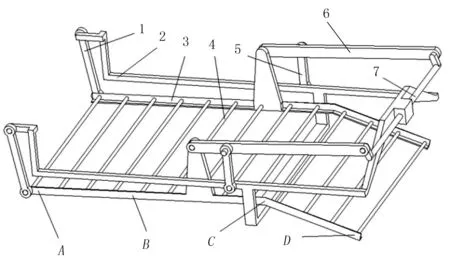
1.前挂杆 2.机架 3.筛架 4.筛条 5.后挂杆
2ADAMS运动分析
2.1ADAMS运动方程
在ADAMS内的每一个构件都与其他的构件通过运动副进行连接,这些运动就构成了运动分析的代数方程。假设运动副构成的约束方程的个数为nh,则用系统广义坐标矢量表示的运动学约束方程组为[4]
(1)
稳定的机械系统的自由度为0,故施加自由度为0的约束,有
ΦD(q,t)=0
(2)
联立式(1)和式(2)可得
(3)
对式(3)进行求导,并令Φt(q,t)=-v ,即可得到速度方程为
(4)

(5)
其中,q为广义坐标系列阵;q、v为广义速度阵列;Φ为描述完整约束的代数方程阵列。
2.2分析设置
根据马铃薯振动筛的形状及大小,利用Creo参数化建模软件,建立振动筛的参数化模型,将模型保存成*.x_t格式的文件[5],并将模型导入到ADAMS中。
模型的所有构件都是通过运动副连接起来的,且振动筛的机架与马铃薯收获机保持相对静止,所以按照振动筛的实际状况,在所有构件铰接的位置施加转动副约束,并利用固定约束将机架与大地固定在一起[6]。整个振动筛模型中含有13个转动副约束和1个固定约束。本文只研究振动筛的运动特性,所以不需要对振动筛各个构件的质量及材料等参数进行设定。
马铃薯振动筛的额定工作转速为383r/min,在振动筛的驱动摇杆上施加一个大小为383r/min的驱动转动。
施加完相关运动副约束和转动驱动后的振动筛模型如图2所示。
为了分析振动筛的运动特性,在振动筛的筛架上建立4个标记点作为测量点,分别为A、B、C、D。其中,B点位于振动筛的质心位置,测量点的位置如图1所示。
2.3求解设置
模型运动时间的长短和数据点的多少可以通过设置求解的时间和求解的步数来控制。振动筛的转速为267r/min,为了观察两个完成周期的运动特性,这里将求解时间设置为0.45s,并将求解步数设置为300。
3求解结果
经过计算求解之后,进入ADAMS后处理模块,利用后处理模块将ADAMS的计算结果转化为特性曲线的形式,用曲线表示马铃薯振动筛各个测量点的运动特性,根据处理得到4个测量点的运动特性曲线。分析得到振动筛的运动特性的相关数据,如表1所示。
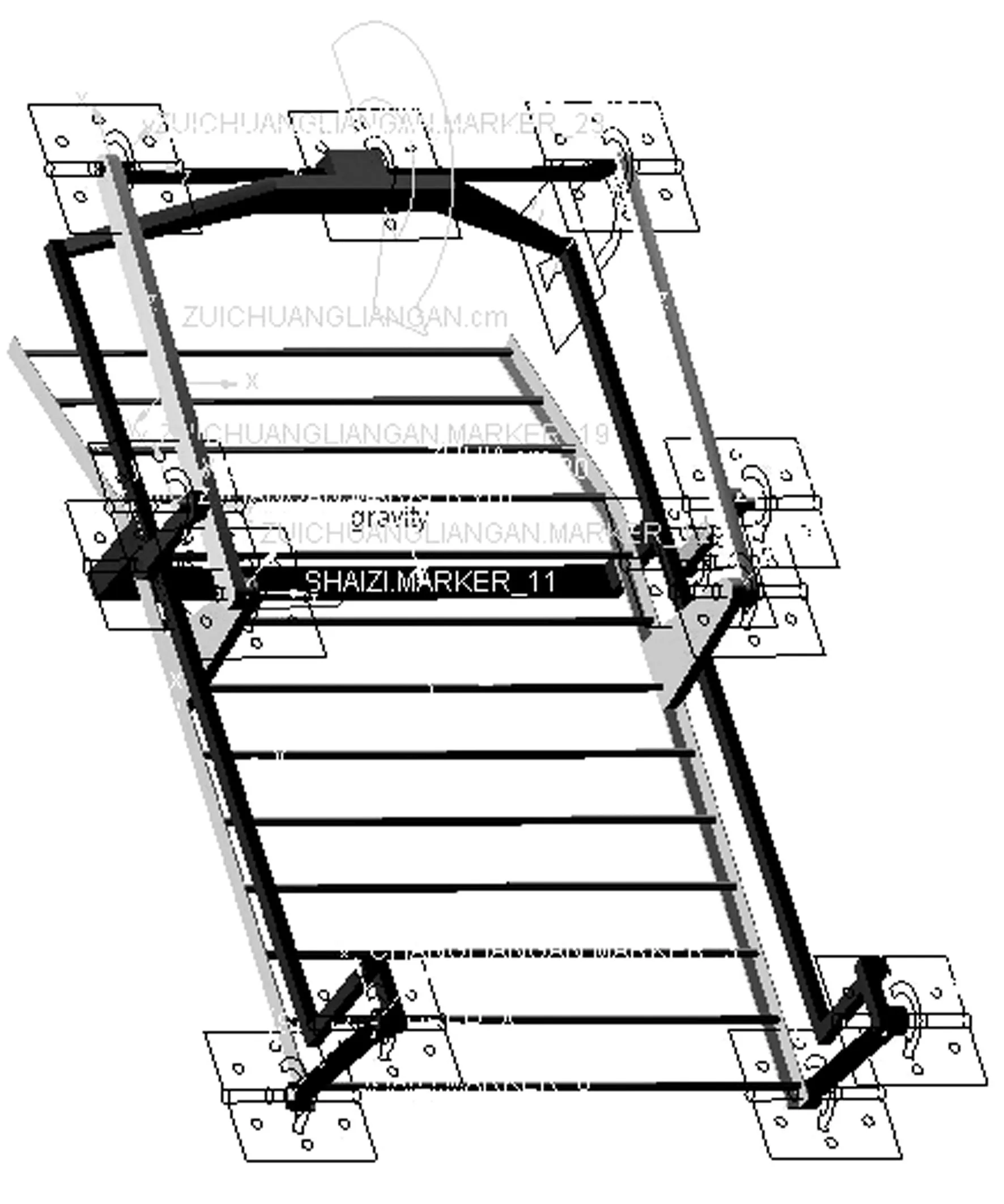
图2 振动筛模型约束
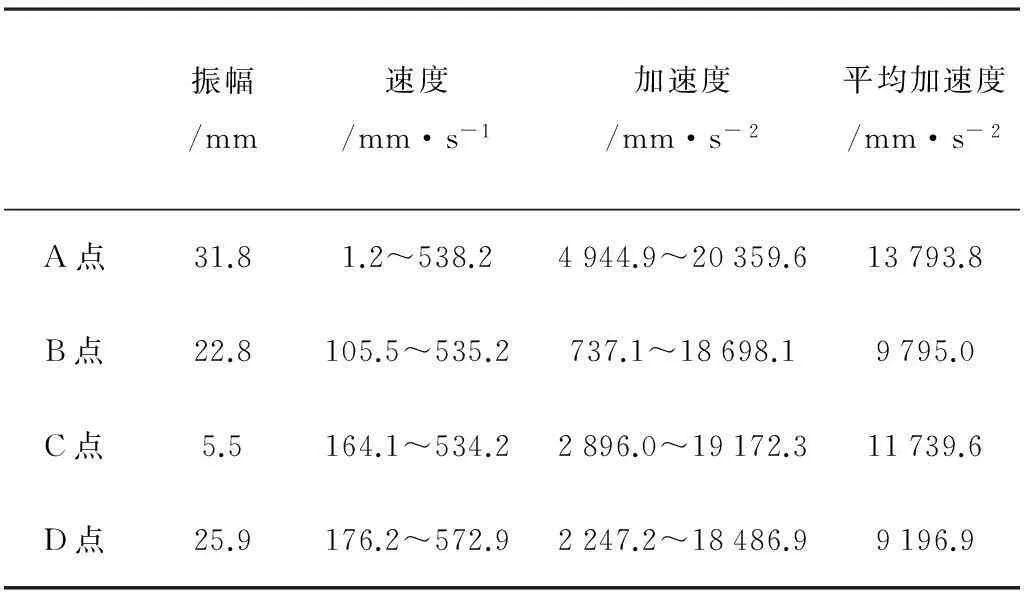
振幅/mm速度/mm·s-1加速度/mm·s-2平均加速度/mm·s-2A点31.81.2~538.24944.9~20359.613793.8B点22.8105.5~535.2737.1~18698.19795.0C点5.5164.1~534.22896.0~19172.311739.6D点25.9176.2~572.92247.2~18486.99196.9
图3是马铃薯振动筛4个测量点位移曲线。由图3可以看出:曲线A和曲线B的波峰和波谷出现的时间相同,曲线C和曲线D的波峰和波谷出现的时间相同,曲线A和曲线D的波峰和波谷出现的时间相差半个运动周期;振幅最大的点为A点,最大值为31.8mm,最小的振幅为5.5mm,振动筛质心B点振幅为22.7mm,理论研究和试验结果表明,尾部振动筛最佳的振幅范围为10~30mm[7],A点和C点的振幅略偏离最佳振动范围。
图4是筛面上各个测量点在x方向的位移曲线。由图4可以看出:筛面从前到后各点在x方向的位移不断增大,使得筛子后端的物体可以很好地被抛出机体。
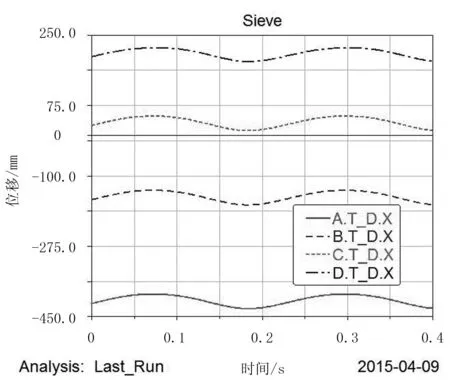
图4 晒面各点在x方向的位移曲线
图5是马铃薯振动筛4个测量点的速度曲线。从图5可以看出:B点、C点、D点的速度曲线基本一致,质心B点的运动速度范围为105.5~535.2mm/s;而在马铃薯块茎不脱离振动筛的的条件下,振动筛质心的运动速度应小于600mm/s[7],符合最佳分离要求。
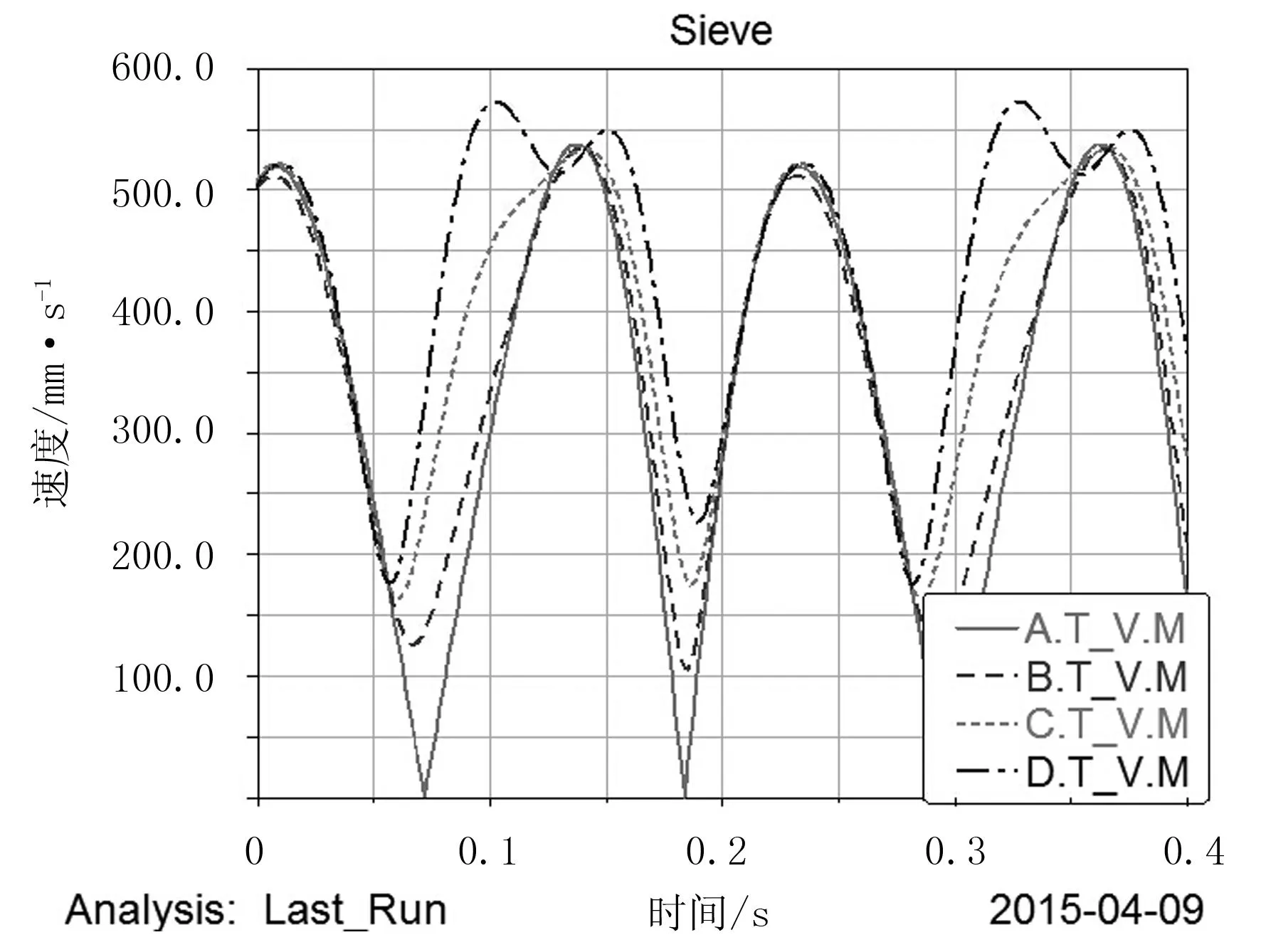
图5 合成速度曲线
图6是马铃薯振荡筛质心B点x、z方向的速度分量。
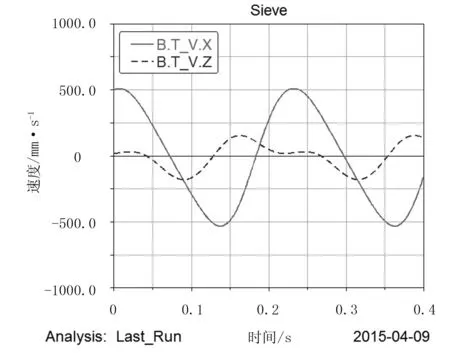
图6 质心B点x、z方向的速度分量曲线
由图6可以看出:B点x方向的速度分量和z方向的速度分量的波峰和波谷没有重合;B点x方向的速度分量的最大值小于510mm/s,不会发生伤薯问题[7]。
图7是马铃薯振动筛4个测量点的加速度曲线。由图7可以看出:质心位置B点的加速度范围是0.7~18.7mm/s2,而在马铃薯块茎不脱离振动筛的条件下,振动筛质心的运动加速度范围是2.5~20mm/s2[7],点B的最小加速度低于最佳范围的下界。
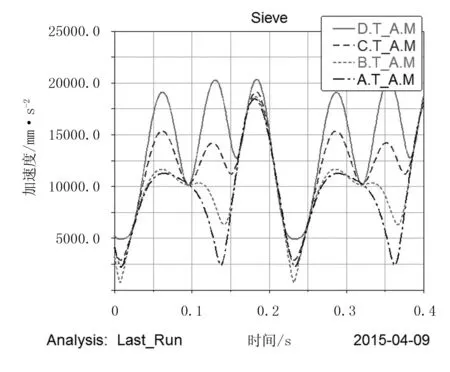
图7 合成加速度曲线
4结论
1)所分析的马铃薯振动筛的振幅最大值为31.8mm,最小值5.5mm,振幅范围偏出了理论最佳振幅范围10~30mm,应当进行适当的优化设计。
2)所分析的马铃薯振动筛质心的速度范围是105.5~535.2mm/s,符合运动速度小于600mm/s的最佳值;所分析的马铃薯振动筛质心的加速度范围是0.7~18.7mm/s2,其最小值小于最佳取值范围2.5~20mm/s2的下界。
3)在对马铃薯振动筛运动特性分析的过程中,应用Creo建立了振动筛的参数化模型,并利用ADAMS对振动筛的振幅、速度等特性进行分析,得到了振动筛运动时的参数,为检验振动筛的工作性能提供了依据,也为振动筛的优化设计提供了数据支持。
参考文献:
[1]史明明,魏宏安,刘星,等.国内外马铃薯收获机械发展现状[J].农机化研究,2013,35(10):213-217.
[2]宋言明,王芬娥.国内外马铃薯机械的发展概况[J].农机化研究,2008(9):224-227.
[3]刘宝,张东兴,李晶.马铃薯收获机主要问题机理分析及其对策[J].农机化研究,2009,31(1):14-16.
[4]韩兴,李昌,于晓光,等.基于ADAMS/View明弧焊接机器人运动仿真分析[J].焊接学报,2013(4):69-72.
[5]郝双双,李阳星,刘训涛,等.基于ADAMS的带式输送机实体仿真模型建立方法[J].煤矿机械,2008,29(2):178-180.
[6]杨莉.马铃薯挖掘机摆动分离筛的仿真与参数优化[D].呼和浩特:内蒙古农业大学,2009:17-21.
[7]贾晶霞.马铃薯收获机关键部件设计与试验研究[D].北京:中国农业大学,2006:66-70.
Kinematics Analysis on Potato Harvester Vibration Sieve Based on ADAMS
Guo Lin, Zhang Tianhui, Wang Ran, Zhang Yonghua
(College of Mechanical and Electrical Engineering,Yunnan Agricultural University,Kunming 650201,China)
Abstract:Potato harvester is a kind of very important machinery in potato production,but the movement of the potato harvester’s vibration sieve is complex and vibration sieve offer damage potato. This article takes a type of potato harvester’s vibration sieve as the research object.The simplified 3D model of the vibration sieve was built by Creo,and analyzed the motion characteristics of vibrating sieve by ADAMS.The analysis results show that the amplitude range which is 5.5mm~31.8mm is bigger than the optimum range which is 10~30mm;the speed range which is 105.5~535.2mm/s is in accordance with the best standard which is samller than 600mm/s; the acceleration range is 0.7~18.7mm/s2,the smallest acceleration is out of the optimum range which is 2.5~20mm/s2. ADAMS can be used to accurately obtain the motion characteristics of vibrating screen, and provides the theoretical basis for the acceptance and optimization design of vibrating sieve.
Key words:potato harvester; vibration sieve; ADAMS; motion analysis
文章编号:1003-188X(2016)05-0024-04
中图分类号:S225.7+1
文献标识码:A
作者简介:果霖(1986-),男,昆明人,讲师,硕士,(E-mail)1265120@qq.com。通讯作者:张永华(1974-),男,云南曲靖人,讲师,硕士。
基金项目:云南省应用基础研究项目(2013FD021);云南省教育厅基金项目(2014Y188)
收稿日期:2015-04-24
