现场方位无人机航拍技法实验探究
——以一起立交桥路道上案发现场方位照相为例
2016-03-22王蚁达
王蚁达,康 卫
(四川警察学院 四川泸州 646000)
现场方位无人机航拍技法实验探究
——以一起立交桥路道上案发现场方位照相为例
王蚁达,康 卫
(四川警察学院 四川泸州 646000)
通过模拟一起立交桥路道上案发现场方位的航拍实验,讨论无人机航拍案发现场方位的一般流程、操作步骤及方法,为将无人机航拍系统引入现勘工作并应用于城区道路案发现场方位图像信息的采集积累实践经验,有助于现场方位摄影思路的拓展,也有助于现场方位摄影传统方法的改良,实现案件现场方位照相中“最佳拍摄角度难以或无法寻找”难题的解决,拓展现场方位照相表现能力。
案件现场;方位照相;无人机航拍
一、当前现场方位照相存在的问题
现场方位照相[1],是指以整个现场和现场周围环境为拍摄对象,反映案件现场所处的位置及其与周围事物关系的专门照相。现场方位照相在说明现场位置、环境的同时,还应反映出案发现场的季节、气候、气氛等,为了表现犯罪现场所处的环境及其与周围事物的位置关系,所以,现场方位照相一般采用远景、全景[2]的表现手法。
在现场方位照相的过程中,某些场景,例如,有危险且暂时无法靠近的、周围无制高点的、位于高层建筑附近但无法到达的案发现场,由于受现场环境条件的限制,拍摄位置的选择通常考虑“高而远”,即不靠近中心现场,在其周围寻找一个较远的制高点,拍摄其案发现场所在地的环境状况是最为理想的。但是,在实拍过程中,很难找到合适的、最佳拍摄方向和拍摄角度[3]。如果采用无人机[4]航拍技法去表现案发现场所在地的方位,在空中取景时可以迅速找到合适的拍摄高度、理想的拍摄角度,比在地面某一制高点上取景与拍摄,有较大的自由度。
为了解决现场方位照相中“最佳拍摄角度难以或无法寻找”的难题,以及创新现场方位照相方法、扩展现场方位照相的表现能力,实验研究现场方位无人机航拍技法有必要的。
本实验目的在于通过模拟一起立交桥路道上案发现场方位的航拍实验,研讨无人机航拍案发现场方位的一般流程、操作步骤及方法。
二、实验准备
实验的准备,主要包括实验之前,航拍器材的选择、检查和实验计划的编制,以及模拟案(事)件实景场地的选择及布置工作等。
(一)实验器材选择。

(二)实验计划编制。
围绕实验研究目的与要求,构思与设计一个包括实验内容、实验方法、实验进度、实验记录制作在内的实验研究实施方案,用于指导本次实验研究工作。
(三)实验场地准备。
在室外选择了一处街景作为本次模拟案件现场实景,如图1-1所示,照片上的红圈处为模拟案件中心现场所在位置。

图1-1 模拟案件现场实景情况
三、实验过程
实验过程指在无人机航拍现场方位的实验中,进行实验研究,记录实验数据,讨论实验结果及阐明研究成果等。
根据其现场所在地及周边环境状况的观察,构思空中拍摄的具体步骤及方法。结合各案件现场的不同特点,在利用无人机航拍系统进行现场方位实地拍摄的同时,进行地面现场方位的比较照相。
(一)实验流程。

(二)实验步骤。
第一步:在模拟案件拍摄现场,开始实验以前,备齐实验所需器材,检查其有无故障。
第二步:对模拟现场进行初步巡视,静态观察现场环境,中心及附件等的状况,周围有无永久性、纪念性的、醒目性的标记或标志物或形象建筑工程等,表现标记或标志物的局部特征作为现场方位的补充说明。
第三步:拍摄计划的构思,主要思考其拍摄内容、拍摄方法、表现形式。例如,巡视现场和听取现场情况介绍之后,思考拍摄内容和表现形式;现场中心地段在何处,有无关联现场或处所;打算在哪里起飞,怎么样的拍摄角度,用什么样的方式来表示现场方位;该现场的拍摄在取景和用光方面,在曝光量控制方面可能使用哪些技法,等等。
第四步:实拍内容的确定,包括对案发现场所在地的地理位置固定、现场周边环境取景范围大小的估计、醒目与标志性建筑物的取舍,以及起飞降落地点的选择、拍摄角度、拍摄高度、拍摄张数和曝光控制等方面的预测。
第五步:按计划实地拍摄模拟现场方位视频、照片。其中,案情较简单、现场环境不复杂的案发现场,一般起降落一个架次,拍摄照片张数可控制在10-15张。案件情况与现场环境较复杂的案发现场,拍摄照片张数可控制在25-35张,必要时,可以多拍摄几张,完成拍摄之后,及时查看现场实拍的效果。
第六步:地面比较照相。按实验计划,采用现场方位照相的一般方法,实地拍摄一组模拟现场的方位照片,作为与空中拍摄照片的比较。
(三)实验方法。
模拟某市区一立体交叉路段发生的一起交通肇事逃逸案件现场,经初步巡视及静态观察,其中心现场及周边环境具有如下特点:案发地点位于城区主干道路段,车流量较大,中心现场正处在一个 “井”字型立体交叉的路道上,路面较宽,路道两旁无高大建筑,其中,南北走向各有两车道,通往“彩虹桥”方向。当日天空晴朗,能见度较高。
1.第一飞行航线设计及航拍系统运行。起飞地点的选择:在案发现场外围东南方向,即“井”字型路面上层人行道边,放置飞行器大疆Phantom 3 Advanced。
升空高度的控制:操控人员距离飞行器约3m,打开遥控和飞行器,连接DJI GO进入“相机”界面,当飞行器状态指示灯显示为绿灯慢闪或双闪后,缓慢推动油门等待飞行器起飞。飞行器起飞且达到一定高度时,一般离地约1米后开始降低油门,可不停地调整油门的大小,使飞行器在1m的高度范围内徘徊之后,然后,增加螺旋桨的转速,使飞行器上升。在飞行器上升的过程中,主要操作杆是油门操作杆,缓慢推动油门,此时飞行器缓慢上升,油门推动越多上升速度越快,但不宜把油门推到最高或接近最高位置,避免飞行器上升速度过快而难以人工掌控。当上升高度达到约35m(接近实拍高度)时,停止推动油门杆的动作,呈悬停状态。接着,操控飞行器向前推进,沿着一定航线抵达预设的拍摄点。
飞行航线与拍摄效果:本次飞行,为大疆Phantom 3 Advanced设计的飞行航线及任务是从现场东南方向起飞、悬停、向前、向左飞行、抵达现场中心上空,进行案发中心现场正射投影图像的采集,如图1-2所示。

图1-2 第一飞行航线与拍摄效果
航拍基本参数:案发中心现场正射投影图片空中拍摄点,光圈F2.8、快门1/472秒、感光度100、高度35m,悬停垂直俯拍。
航拍系统操控动作要领:飞行器前进时,向前推俯冲摇杆,飞行器会俯冲前行。在俯冲过程中,机头略微下降,机头的两个螺旋桨转速将下降,这时机尾略抬起,机尾螺旋桨转速将提高,随着机身受力的改变,飞行器与水平面构成一定的夹角。这样一来,不仅可以给飞行器提供抵消重力的升力,而且可以提供前行的动力。随着升力的减小,其飞行高度会略有降低,这时,可以适当推动油门,在维持悬停高度的同时向前飞行。飞行器左偏航行时,将横滚摇杆轻轻向左侧推动以后,其机身略呈左倾斜状,这时,机头方向保持不变,飞行器向左侧横向飞行,并抵达案发中心现场上空。飞行器悬停拍照时,在其它摇杆不动的情况下,如果飞行器有GPS信号时,将油门杆回中固定,保持飞行高度,然后调整航拍相机云台俯仰控制拨轮的方向,即手动控制相机的俯仰角度,当机载相机的镜头仰俯角度呈-90°时,按下拍照按键拍摄案发现场中心正射投影图片数张。
2.第二飞行航线设计及航拍系统运行。在完成第一飞行航线及任务之后,设计并执行第二飞行航线及任务,其操作的具体过程如下所述。
拍摄点的选择:为了表现一起交通肇事逃逸案件现场上由南向北、由北向南所见的路面实况和下穿车道特点,故选择拍照点A、拍照B两处,作为本案现场相向照相的实拍地点。
前进中的高度控制:在飞行器向前推进的过程中,根据本案现场相向拍摄的特点及条件,适当降低飞行高度,在飞行器下降过程中,油门操作杆是飞行器下降的主控装置,向下缓慢拉动油门操作杆时,螺旋桨的转速会降低,飞行器因此缺乏上升动力而开始降低高度,油门操作杆向下拉动幅度越大下降速度越快。但是,不宜把油门操作杆拉到最低或接近最低位置,避免飞行器下降速度过快而难以人工掌控。当下降高度达到约15m(接近实拍高度)时,停止向下拉动油门杆的动作,飞行器呈悬停状态。
飞行航线与拍摄效果:本次飞行,为大疆Phantom 3 Advanced设计的飞行航线及任务是空中相向拍摄现场方位,即指飞行器由案发现场中心上空飞往拍摄点A时,向前、向左飞行,转换飞行姿态之后,接着向前飞行到达拍摄点A,进行“中景照相”。然后,飞行器由拍摄点A向左、向前、向右飞行,转换飞行姿态之后,接着向前飞行到达拍摄点B,进行“中景照相”。由本案中心现场两侧A、B拍摄点,分别采集案发中心现场的相向照相图片。如图1-3所示。在飞行过程中,逐步降低飞行高度,寻找最佳取景角度与高度。
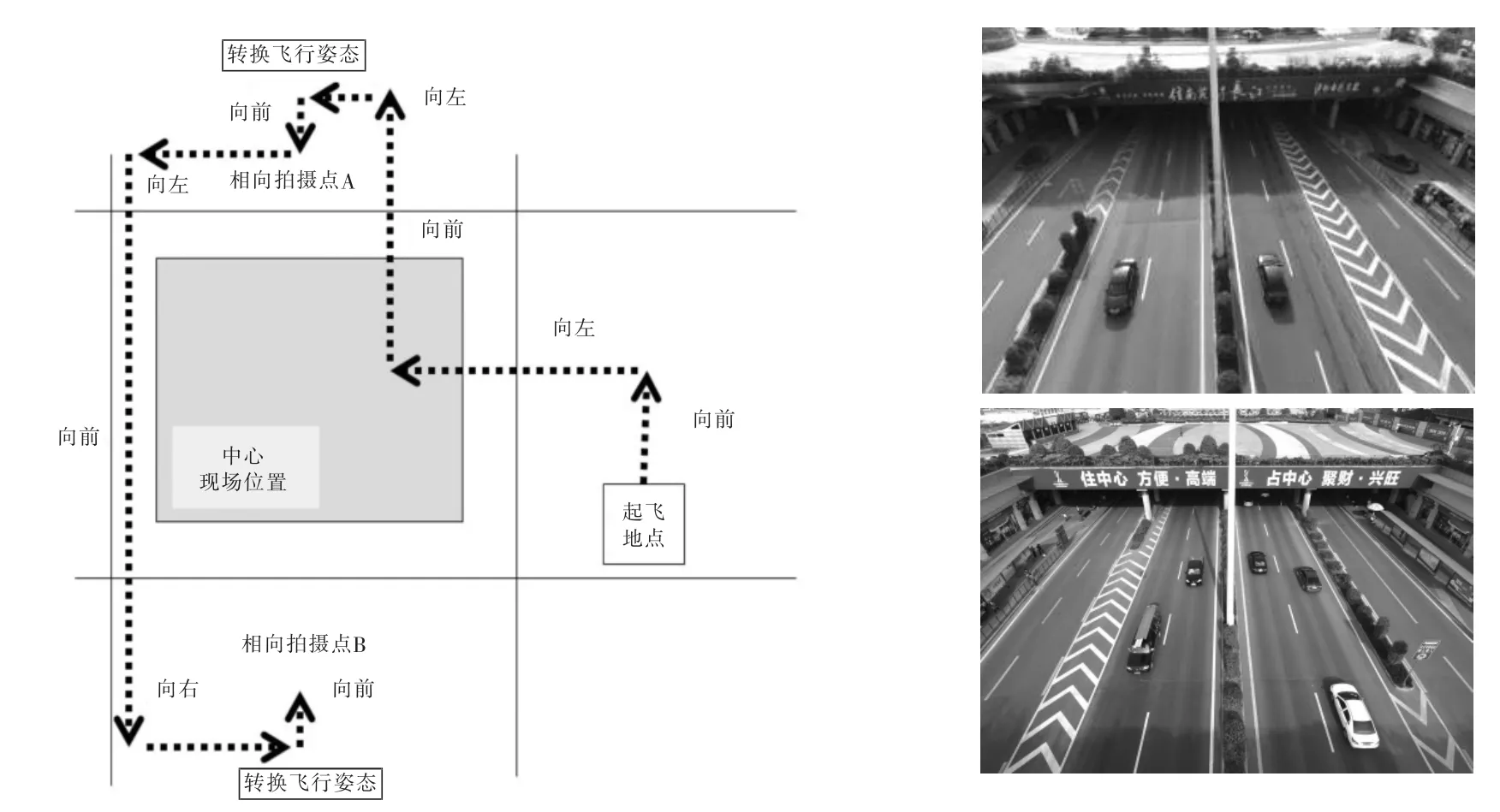
图1-3 第二飞行航线与拍摄效果
航拍基本参数:案发中心现场相向拍摄点A,光圈F2.8、快门1/412秒、感光度100、高度15m、中景,由北向南拍摄。案发中心现场相向拍摄点B,光圈1/2.8、快门1/477秒、感光度100、高度15m、中景,由南向北拍摄。
航拍系统操控动作要领:飞行器飞行姿态的转换,即指在飞行过程中飞行器机头方向的变换。本次实验采用逆时针旋转机头的方法转换飞行姿态,即缓慢向左侧推动偏航摇杆,飞行器的机头将开始做逆时针转向动作。转动速度与调整摇杆的幅度有关,如果摇杆偏离中心位置越大,则转动的速度越快。
当飞行器完成向前、向左飞行,转换飞行姿态以后,前行抵达案发中心现场相向拍摄点A上空,呈悬停状态,由北向南进行拍摄,即调整航拍相机云台俯仰控制拨轮的方向,即手动控制相机的俯仰角度,当机载相机的镜头仰俯角度呈-30°时,按下拍照按键拍摄案发中心现场中景照片数张。
在完成本案现场相向拍摄点A的拍摄任务以后,飞行器继续向左偏航、向前、向右偏航飞行,转换飞行姿态以后,前行抵达案发中心现场相向拍摄点B上空,呈悬停状态,由南向北进行拍摄,即调整航拍相机云台俯仰控制拨轮的方向,即手动控制相机的俯仰角度,当机载相机的镜头仰俯角度呈-30°时,按下拍照按键拍摄案发中心现场中景照片数张。
在本次飞行中,“向右偏航”与“向左偏航”控制飞行器动作的主要区别是:“向右偏航”,即指在机头方向保持不变的情况下,飞行器横滚摇杆轻轻向右侧推动以后,其机身略呈右倾斜状,飞行器向右侧横向飞行。在相向拍摄点A、B的寻找与确定过程中,首先确认飞行器前行的“航线”上没有任何障碍物,其次确认飞行中不会有障碍物移动到飞行器前面或附近。
3.第三飞行航线设计及航拍系统运行。在相继完成第一、第二飞行航线及任务之后,设计并执行第三飞行航线及任务,其操作的具体过程如下所述。
拍摄点的选择:为了在案发现场外围由南向北拍摄远景照片,以该市标志性建筑“彩虹桥”为参照,选定拍照点C,作为表现一起交通肇事逃逸案件现场中心所在位置的实拍地点。
前进中的高度控制:在飞行器向前推进的过程中,根据本案现场中心及周边环境特点,适当上升飞行高度,在飞行器上升过程中,油门操作杆是飞行器上升的主控装置,向上缓慢推动油门操作杆时,螺旋桨的转速将提高,油门操作杆向上推动幅度越大,上升速度越快。但是,不宜把油门操作杆推到最高或接近最高位置,避免飞行器上升速度过快而难以人工掌控。在上升高度达到约40m时,停止向上推动油门杆的动作,使飞行器呈悬停状态。
飞行航线与拍摄效果:本次飞行,为大疆Phantom 3 Advanced设计的飞行航线及任务是在原有飞行姿态保持不变的情况下,飞行器由案发中心现场相向拍摄点B上空上升飞行高度,然后向右、向前抵达中心现场外围拍摄点C,进行远景照相,如图1-4所示。
航拍基本参数:案发中心现场远景拍摄点C,光圈F2.8、快门1/803秒、感光度100、高度40m,由南向北侧向拍摄。
航拍系统操控动作要领:飞行器向右偏航、向前飞行到达拍摄点C上空、悬停拍照等操控动作,类似于第一、第二飞行航线及任务运行时操控动作,在此不作赘述。
在本案发中心现场远景拍摄中,调整航拍相机云台俯仰控制拨轮的方向,即手动控制相机的俯仰角度,当机载相机的镜头仰俯角度呈-10°时,按下拍照按键拍摄案发现场由南向北的远景图片数张。
4.第四飞行航线设计及航拍系统运行。在相继完成第一、第二、第三飞行航线及任务之后,安全降落飞行器,其操作的具体过程如下所述。
降落地点的选择:在案发现场外围东南方向,即“井”字型路面上层人行大道边,行人稀少、平坦开阔的空地上,安全降落当前执行任务的飞行器——大疆Phantom 3 Advanced。
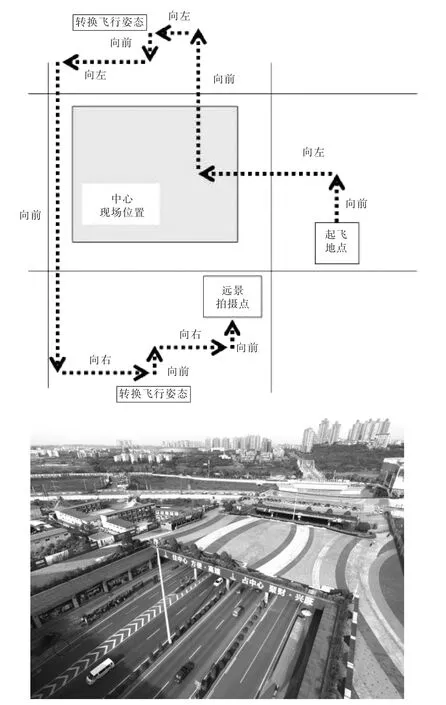
图1-4 第三飞行航线与拍摄效果
降落高度的控制:在飞行器已稳定悬停的基础上,缓慢拉下油门杆,使螺旋桨的转速缓慢降低,飞行器由于缺乏升力,因此而开始降低高度。
在降落操作过程中,不能将油门降得太低,以防止飞行器下降速度过快难以掌控。当飞行高度有较为明显的下降时,停止落下油门摇杆,这时飞行器还会继续下降。
与此同时,不要让飞行器过于接近地面,一般在距离地面30-300cm的高度,开始推动油门,迫使飞行器下降速度减慢,直至停止下降呈悬停状态为宜。
飞行航线与拍摄效果:本次飞行,为大疆Phantom 3 Advanced设计的飞行航线及任务是在完成案发中心现场方位航拍任务之后,下降飞行高度,向左抵达降落地点,安全降落飞行器,完成返航任务,如图1-5所示。
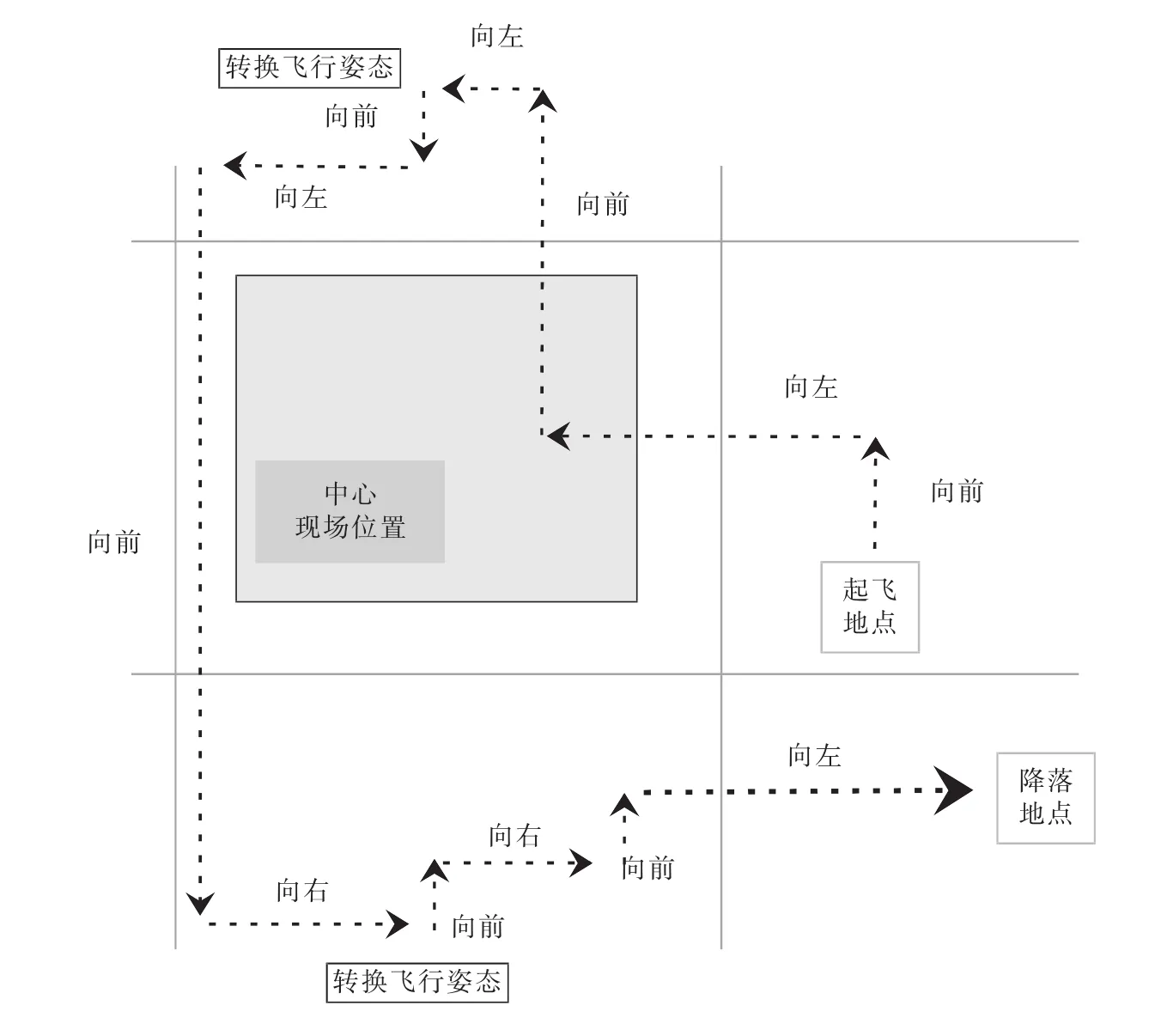
图1-5 第四飞行航线与返航地点
航拍系统操控动作要领:完成所有航拍任务以后,在飞行姿态保持不变的情况下,操控飞行器向左偏航(向左侧横向飞行),当抵达降落地点上空约30-300cm时,呈悬停状,此时,缓慢降低油门直至飞行器触地(触地后不能推动油门),将油门杆降到最低位置并保持3秒,直至四个螺旋桨的电机停止,最后关闭飞行器和遥控器,退出DJI GO“相机”界面。
5.地面拍摄的比较。在上层车道一侧的人行道边,拍摄了一张能见到标志建筑——“彩虹桥”的、主要表现本案现场所在位置的照片,如图1-6所示。
在下层车道一侧的人行道边,采用“回转连续照相法”[5]由天空向地面(至上而下)拍摄了一组用于补充说明本案现场环境特点的照片,如图1-7所示。
四、实验结果与讨论
在航拍与地面拍摄照片的对比中,从现场拍摄条件来看,虽然地面拍摄时,现场附近有制高点(高层建筑)可选,但是,距离较远且在装修中无法登顶,因此,只能站在上层街面上,离中心现场较远的位置平视拍照,存在的主要问题是相机在地面上架设的高度无法提升,主体与前景、背景的部分重叠无法避免。因而,无论在地面何处拍摄,都不能呈现出案发现场“井字型”路道的特点。而空中拍摄时,无人飞行器可以在现场附近起飞,并且迅速到达案件中心现场上空,可提供任意角度的俯视拍摄及旋停垂直拍摄。航拍的优点在于拍摄现场方位视野开阔、选择拍摄角度不受限制,可以在空中找到最佳拍摄方向与拍摄角度,可以更好地呈现出案发现场“井字型”路道状况及方位特点。
从现场拍摄方法来看,当案发现场及周围无法找到制高点,或者难以寻到最佳拍摄方向及角度时,虽然在地面可以采用现场方位照相的一些传统方法,例如,运用“一景多照”、“一物多拍”的方法,或者在“井”字型路道下层运用回转连续拍照法等方式进行拍摄,但是,与空中航拍方法相比,地面所拍现场方位照片的最大弱点是:照相固定的案发中心现场所在地点及具体位置,总是缺少一种地图式的“坐标定位感”,只是从某些侧面、某些角度再现了案件现场的真实场景,或者只是借助案发现场及周围永久性、标志性建筑物说明了其主体与关联现场、中心与外围现场之间的关系,事实上并没有让现场方位照片组合呈现出一种“现场整体感”。如果采用航拍技法去表现这一模拟案件现场的路道状况及方位特点,那么,可以在空中取景与拍摄时,更容易、更迅速地找到表现这个“井字型”的理想拍摄高度、拍摄方向与拍摄角度,比在地面取景与拍摄时,更为省时、省力。空中垂直与高俯视航拍的优点在于表现一个案件现场的方位及环境特点,更加精确与完整。
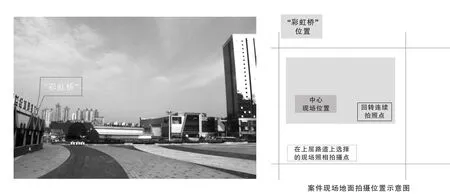
图1-6 案发中心现场“井字型”上层路道,手持相机正面平视拍摄效果

图1-7 案发中心现场“井字型”下层路道,手持相机侧面纵向、回转连续拍摄效果
综上所述,通过模拟“井”字型立体交叉路段上一起交通肇事逃逸案件现场空中拍照与地面拍照的比较实验,得出本次实验的结论是:在本案现场方位及现场中心场景的拍摄过程中,虽然空中拍照与地面拍照的影像品质相当,但是,在同一场景、同一内容的表现之中,航拍时的方向及角度的选择,比地面拍摄具有更大地自由调节度,并且航拍的效果明显优于地面拍摄的效果。
利用无人机航拍装置进行交通事故现场方位照相具有许多优越性,是传统的现场照相方法无法比拟的。对此应加强研究。这不仅有助于无人机技术应用范围的拓展,而且也有助于丰富警务现场照相的理论与方法。
[1]王渝霞著.警务现场照相[M].北京:中国人民公安大学出版社,2005:5.
[2]刘泉友.基础摄影教程[M].南京:东南大学出版,2009.
[3]百度经验.怎样选择拍摄角度[EP/OL].http://jingyan.baidu.com/article/14bd256e0dac21bb6d261293.html.
[4][法]鲁道夫·乔巴尔.玩转无人机[M].吴 博译.北京:人民邮电出版社,2015:11.
[5]王渝霞.警务现场照相[M].北京:中国人民公安大学出版社,2005:119.
UAVAerialPhotographyTechniquesExperimentofCrimeScene:Takinga caseonanOverpassasExample
WANG Yi-da,Kang Wei
Through a simulation of aerial photography of a crime scene on an overpass,the article discusses the general process,operation steps and method,which can accumulate practical experience for applying UAV aerial photography system to crime scene investigation in urban area.It is helpful to develop the thinking of taking crime scene photography,to improve tradition ways of location photography,to solve the problem of finding the best shooting angle,and to perfect location photography skills.
Crime Scene;Location Photography;UAV
TP242
:A
:1674-5612(2016)04-0053-09
(责任编辑:赖方中)
四川警察学院2015年度创新性实验项目《无人机采集现场方位图像操作规程研究》(15CX014)。
2016-03-12
王蚁达,(1993-),男,四川盐边人,四川警察学院2013级本科生,研究方向:公安声像技术;康卫(1957-),男,安徽阜阳人,四川警察学院副教授,研究方向:公安声像技术。
