基于ROS的机械臂轨迹规划研究
2016-03-16刘汝佳
刘汝佳,王 芳,张 强,李 楠
(航天科工智能机器人有限责任公司,北京 100074)
基于ROS的机械臂轨迹规划研究
刘汝佳,王 芳,张 强,李 楠
(航天科工智能机器人有限责任公司,北京 100074)
针对机械臂轨迹规划中算法复杂、开发难度高的技术难点,提出基于一款开源软件平台(Robot Operating System,ROS)为机械臂搭建控制系统的方法作为解决方案。在此基础上,设计了一种基于五次多项式插值的算法来弥补该开源软件平台中关于轨迹规划功能的不足,并通过仿真实验验证了改进后的控制算法可以提高机械臂控制性能。该方法对于实现工程机械臂轨迹规划问题具有普遍的指导意义。
机器人;机械臂;ROS;运动控制;轨迹规划
0 引言
机械臂在工业生产中有着广泛的应用,例如使用机械臂来搬运货物、组装产品等。机械臂技术中普遍遇到的难题之一是高精度的轨迹规划[1-3],这也是机械臂技术研究中最重要的一环。传统的研究机械臂轨迹规划问题的方法需要根据每一款具体的臂搭建符合实际情况的控制系统[4-5],涉及末端轨迹规划、运动学逆解、干涉与约束算法以及关节细插值等过程,这一过程工作量大、耗时长,难以在高效率的现代社会普遍应用。如今机器人软件开发平台的快速发展为解决这一技术难题提供了新的思路[6-7]。
所谓的机器人软件开发平台,是指用来给多种机器人设备开发程序的软件包集。它一般具备下列特点:
1)统一的编程、编译环境;
2)可重用的组件库;
3)具备一定的仿真、模拟条件;
4)对多款机器人设备的硬件提供驱动支持(留有二次开发驱动的接口);
5)包含一些常用的、模块化的控制功能组件,例如导航技术、计算机视觉技术、机械臂运动控制等。
现在常用的机器人软件平台如表1所示。
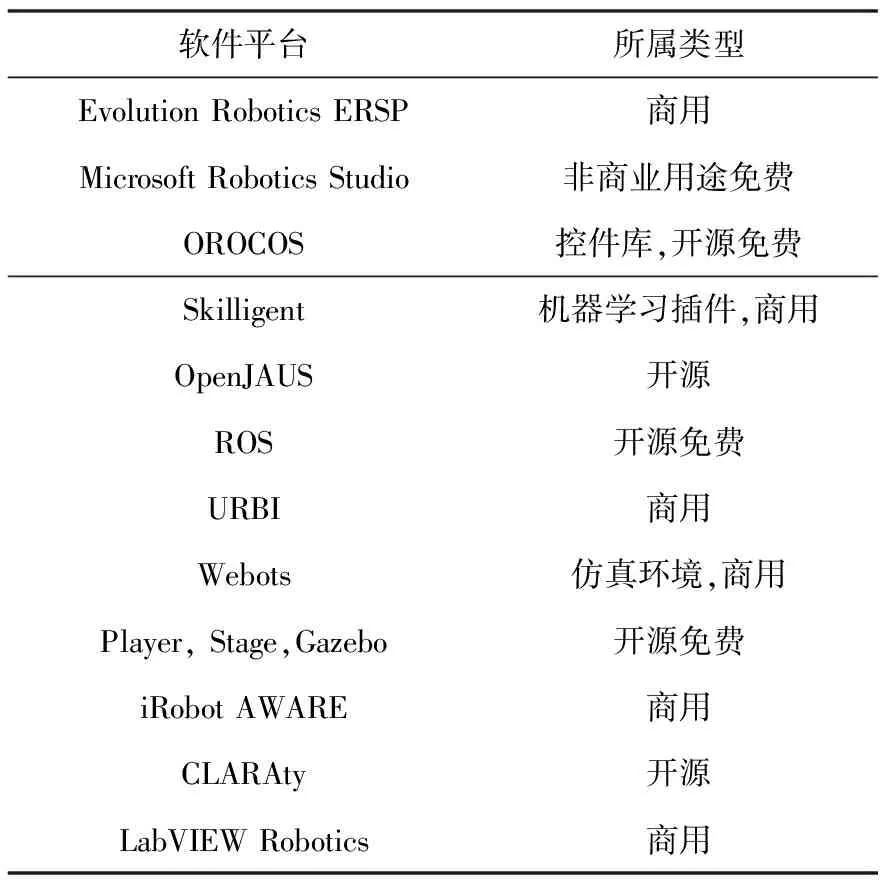
表1 机器人软件开发平台
本文中选用的开发平台是由Willow Garage公司开发的机器人操作系统ROS (Robot Operating System)。ROS在构建机器人控制系统方面非常便利,具有兼容性高、开源算法完备的特点[8-10],是目前主流的机器人开发平台之一。
本文在研究机械臂轨迹规划问题中充分应用机器人软件开发平台的便利特性和开源成果,并在此基础上通过二次开发,改进了控制算法,对实现机械臂的平稳控制具有重要意义。
1 机械臂轨迹规划研究
1.1 机械臂控制系统
图1所示为基于ROS为机械臂搭建的运动控制系统框图。上位机的操作系统运行ROS软件开发平台,主要实现机器人运动学解算、位置插补以及轨迹规划等工作。驱动接口将ROS输出的数据通过CAN总线发送给驱动器,由驱动器驱动电机转动完成机械臂的运动。机械臂上的传感器将采集的位置、速度等信息实时反馈给上位机,通过闭环控制,实现对机械臂的精度控制。

图1 机器人运动控制系统框图Fig.1 The principle diagram of robot control system
1.2 ROS实现机械臂轨迹规划及其存在的问题
机械臂包含两种类型的运动方式[11]。一是点对点的运动:只考虑机械臂在笛卡尔空间从起始位姿移动到目标位姿,不考虑运动过程中的位姿;二是轨迹运动:需要精确规划机械臂所走的路径。例如机械臂末端沿一条直线移动需要其姿态在移动过程中保持不变,而位置在笛卡尔空间中是一条直线。机械臂轨迹运动下的位姿显然是关于时间的函数。
无论让机械臂以何种方式运动,开发者都需要得到在关节空间中解算的一系列关节角度插值。要完成这一任务不仅要用到机器人逆运动学解,还要考虑机械臂在运动过程中的碰撞检测、轨迹规划中的运动约束(比如始终保持末端执行器的姿态不变)以及机械臂运动平稳性等问题。
MoveIt是ROS一个重量级的应用模块[12],它包含了机械臂运动控制的核心功能。
本文所研究的机械表模型是一条7自由度的串联机械臂。应用MoveIt模块可以快速完成三方面的工作:机械臂建模、运动学解算和路径规划。MoveIt在运动学解算以及路径规划过程中,会将各种运动约束的因素也考虑进来。例如防碰撞检测、设定关节最大运动角度和角速度等。但是MoveIt在仿真环境下输出的轨迹规划数据只包含7个关节的角度插值数据,没有角速度插值,并且输出周期为500ms。驱动器根据此数据会驱动电机在该周期内以指定恒速到达指定位置,这样会导致位置与时间的不同步,末端精度出现较大误差。图2所示为机械臂跟踪X-Y平面内一条直线情况下关节空间内4号关节角度插值输出图。图3所示为机械臂跟踪X-Y平面内一条直线情况下笛卡尔空间内机械臂末端运动轨迹图。

图2 关节4角度插值Fig.2 The angle interpolation of joint 4
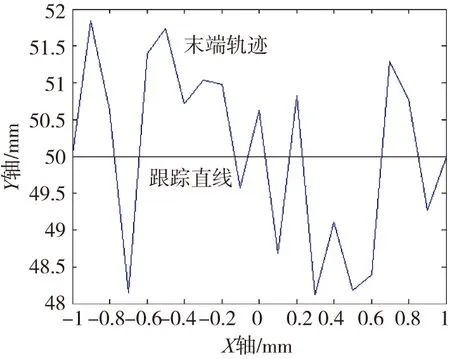
图3 跟踪直线末端轨迹Fig.3 The path of tracking straight
由图2和图3可以看出,由于MoveIt输出的关节角度插值精度低,并且没有速度插值数据(驱动器采用的是默认的初始关节速度),导致机械臂末端跟踪误差大。为了解决这一问题,我们需要在规划输出数据和驱动器之间加入一个处理环。该处理环的作用是以更小的控制周期进行数学插值,减小机械臂末端跟踪误差,同时也可以降低电机的加速度,防止在运行过程中由于频繁大幅的加减速而导致的机械臂抖动问题,如图4所示。

图4 轨迹规划输出示意图Fig.4 The output of the trajectory planning
1.3 改进的控制算法
1.3.1 控制流程
在MoveIt输出的轨迹角度插值的基础上,本文设计了五次多项式插值算法将其角度插值更加细分,并可以得到连续的角速度插值。该方法可以将仿真得到的数据直接输出给驱动器使用。完整的运动控制流程图如图5所示。

图5 运动控制流程图Fig.5 The flow diagram of motion control
1.3.2 插值算法
设想这样的场景:MoveIt轨迹规划库函数计算输出离散的关节角度插值,每一个插值点都可以看做是一个路径点;每个机械臂关节依次通过所有路径点,映射成不同关节关于时间的一段段连续的光滑曲线。不同关节的时间函数曲线是相互独立的,但运动周期与总的运动时间是相同的。
机械臂平稳的运动需要保证其关节角速度是连续可导的,并且角加速度是连续的。因此,可以构造五次多项式插值函数来模拟上述情景中的每段连续的时间函数。求解五次多项式方程组需要6个已知条件:分别为不同关节的每段时间函数的起始点ti(其中,i∈(1,N),N是MoveIt输出的关节插值数目)时刻和目标点ti+1时刻的角度、速度和加速度。
任意ti+1时刻的角度θti+1就是MoveIt输出的路径点;ti+1时刻的瞬时角速度由相邻路径点角度差除以运动周期代替(其中,Δt为控制周期)
(1)
ti+1时刻的瞬时角加速度由相邻中间点角速度差除以运动周期代替
(2)
以此便可以根据已知的起始点和目标点的6个条件求解五次多项式方程组系数。通过五次多项式插值进一步细分关节角度和角速度插值并将其发送给驱动器。
θt=C1t5+C2t4+C3t3+C4t2+C5t+C6
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
根据克莱姆法则,解得系数通式如下所示:
(12)
(13)
(14)

(15)

(16)

(17)
将此系数通式带入到原方程式(6)~式(11)中,便可以求得7个关节在每段插值内的时间函数。
1.4 插值算法软件实现
基于上述算法控制流程图,便可以编写软件来实现机械臂的轨迹运动功能。设定机械臂运动的起始点和目标点,通过计算机解算获得在关节空间运动的参数;计算机判断机械臂是否运动到目标点;当机械臂运动到目标点,计算机停止发送运动指令。软件流程如图6所示。
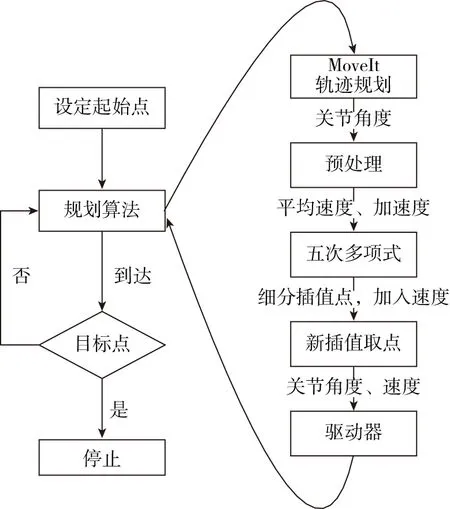
图6 软件设计流程图Fig.6 The flow diagram of software design
2 仿真
通过仿真实验对五次多项式的插值效果进行研究验证。机械臂右臂在ROS仿真环境下按照图7所示圆弧轨迹运动。
利用MoveIt轨迹规划函数解算出一组7个关节的插值点,如表2所示。
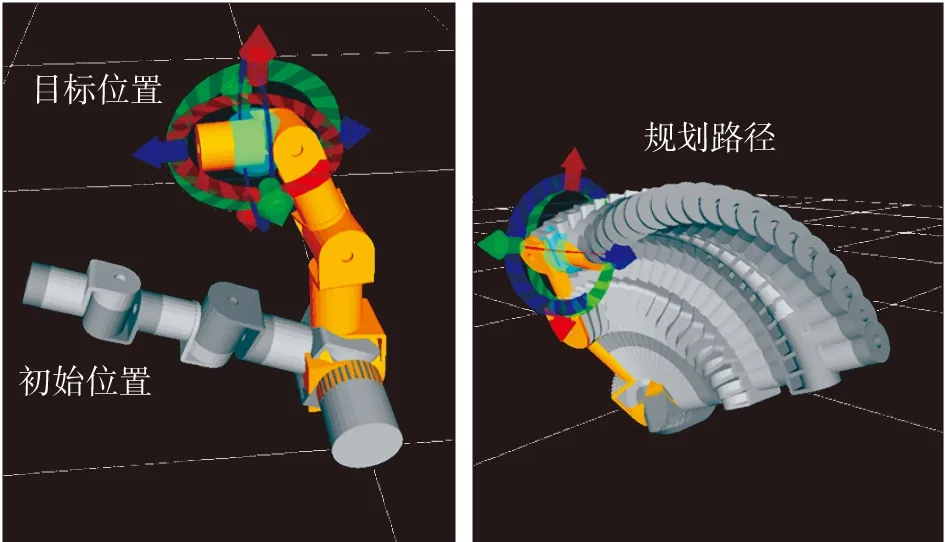
图7 机械臂运动仿真Fig.7 The robot arm motion simulation
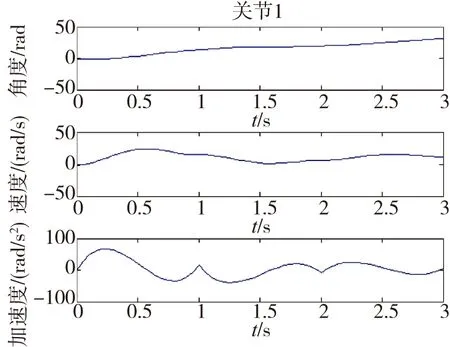
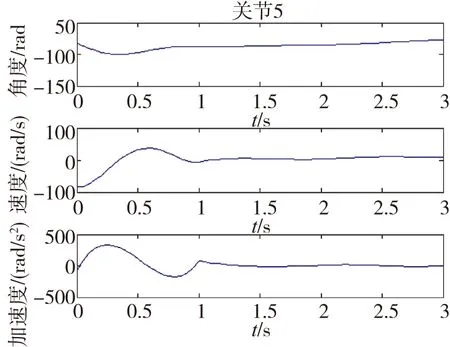
基于表2用五次多项式每50ms完成一次插值运算并使用Matlab绘制曲线。前6个关节角度、角速度、角加速度如图8所示(关节7在本例中没有运动,曲线省略)。
机械臂末端在此规划数值下沿圆弧剖面跟踪轨迹如图9所示。
(a)

(b)

(c)

(d)
(e)

(f)

图9 跟踪圆弧末端轨迹Fig.9 The path of tracking circle
从图8中可以看出,多项式插补后的角度、角速度和角加速度曲线都是连续、可导的,这样会减小运动过程中由于机械臂电机起停等因素导致的冲击,延长电机寿命,增强机械臂在运动过程中的平稳性。
在添加了新的插值算法之后,从图9可以看出,机械臂的跟踪圆弧与理论圆弧的距离误差最大不超过0.1mm,并且运动过程中不会产出累积误差而导致机械臂无法到达指定目标点。对运动仿真模拟的结果验证了五次多项式插值算法,保证了机械臂轨迹运动的高精度。
3 结论
本文基于ROS平台进行机械臂轨迹规划的二次开发,通过对轨迹跟踪算法的完善,将插补速度加入,保证了机械臂轨迹规划的跟踪精度,提高了机械臂运动的平稳性,并且通过仿真实验验证了该算法对于机械臂轨迹跟踪优化的有效性,后续将在机械臂平台进行相应的实际实验验证。同时,本文所做的研究表明基于ROS软件开发平台为机械臂快速搭建控制系统的方法提高了开发效率,减小了开发难度,为机械臂开发人员提供了一套可供参考的方案。
[1] Wen-Fu X U, Wang X Q, Xue Q, et al. Study on trajectory planning of dual-arm space robot keeping the base stabilized [J].Acta Automatica Sinica, 2013, 39(1):69-80.
[2] Tang X, Shao Z. Trajectory generation and tracking control of a multi-level hybrid support manipulator in FAST [J].Mechatronics, 2013, 23(8):1113-1122.
[3] 郑利红, 荣国宏, 李元宗. 基于改进的Khatib方法的冗余机器人手避障轨迹规划[J].太原理工大学学报, 2015, 32(1):29-32.
[4] 刘华山. 旋转关节串联机器人多轴运动控制技术研究[D].杭州:浙江大学, 2010.
[5] 秦锋, 徐向荣. 基于样条函数法的机器人运动轨迹规划[J].机械科学与技术, 1996,15(4):561-565.
[6] Metta G, Sandini G, Vernon D, et al. The iCub humanoid robot: an open platform for research in embodied cognition[C]// Proceedings of the 8thWorkshop on Performance Metrics for Intelligent Systems. ACM, 2008:50-56.
[7] Ha I, Tamura Y, Asama H. Development of open platform humanoid robot DARwIn-OP [J].Advanced Robotics, 2013, 27(3):617-628.
[8] 曹正万, 平雪良, 陈盛龙,等. 基于ROS的机器人模型构建方法研究[J].组合机床与自动化加工技术, 2015(8):51-54.
[9] Hart S, Dinh P, Hambuchen K. The affordance template ROS package for robot task programming[C]// 2015 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2015:6227-6234.
[10] Tsarouchi P, Makris S, Michalos G, et al. ROS based coordination of human robot cooperative assembly tasks-an industrial case study[J].Procedia CIRP, 2015, 37:254-259.
[11] 马江. 六自由度机械臂控制系统设计与运动学仿真[D].北京:北京工业大学, 2009.
[12] Coleman D, Sucan I, Chitta S, et al. Reducing the barrier to entry of complex robotic software: a moveit! case study[J].Eprint Arxiv, 2014.
[13] Okada Kei. ROS(Robot Operating System)[J].Journal of the Robotics Society of Japan, 2012, 30(9):830-835.
[14] 蔡自兴,徐光祐. 人工智能机器应用 [M].北京:清华大学出版社,2010.
[15] 张建伟,张立伟,胡颖,等.开源机器人操作系统—ROS [M].北京:科学出版社,2012.
中国航天科工集团公司科技期刊联合征订启事
《Journal of Systems Engineering and Electronics》是由中国航天科工集团公司主管,中国航天科工防御技术研究院、中国宇航学会、中国系统工程学会联合主办,北京航天情报与信息研究所承办的英文学术期刊,创刊于1990年,双月刊。主要栏目为:电子技术,防御电子技术,系统工程,军用系统分析,控制理论与实践,软件、算法与仿真,可靠性等。本刊被美国科学引文索引(SCI)、美国工程索引(EI)、美国剑桥科学文摘(CSA)、英国科学文摘(INSPEC)、荷兰SCOPUS、美国IEEE Xplore、中国知网、万方数据以及《中国学术期刊文摘》《中国无线电电子学文摘》《电子科学文摘》等国内外多种权威检索机构或数据库收录,获中国国际影响力优秀学术期刊等多项荣誉。本刊与美国电气和电子工程师学会(IEEE)签约,成为国内首批与IEEE建立合作关系的期刊。国际标准连续出版物号:ISSN 1004-4132;国内统一刊号:CN 11-3018/N。期定价:90元,年定价:540元;邮发代号:82-270。可通过本刊编辑部联系订阅(通信地址:北京142信箱32分箱,邮编:100854,发行电话:010-68386015),也可通过邮局订阅。E-mail:jseeoffice@126.com,网址:http://www.jseepub.com。
《系统工程与电子技术》是由中国航天科工集团公司主管,中国航天科工防御技术研究院、中国宇航学会、中国系统工程学会联合主办,北京航天情报与信息研究所承办的中文学术期刊,创刊于1979年,月刊。主要栏目为:电子技术,传感器与信号处理,系统工程,制导、导航与控制,通信与网络,软件、算法与仿真,可靠性等。本刊为中国科学引文数据库核心期刊、中国科技论文统计源期刊,被美国工程索引(EI)、英国科学文摘(INSPEC)、日本科学技术振兴机构数据库(JST)、中国核心期刊(遴选)数据库以及《中文核心期刊要目总览》《中国学术期刊文摘》《中国无线电电子学文摘》《电子科学文摘》等国内外多种权威检索机构或数据库收录,曾获中国期刊方阵“双百期刊”、国家期刊奖百种重点期刊、中国精品科技期刊、中国国际影响力优秀学术期刊等多项荣誉。国际标准连续出版物号:ISSN 1001-506X;国内统一刊号:CN 11-2422/TN。期定价:40元,年定价:480元;邮发代号:82-269。可通过本刊编辑部联系订阅(通信地址:北京142信箱32分箱,邮编:100854,发行电话:010-68386015),也可通过邮局订阅。E-mail:xtgcydzjs@163.com,网址:http://www.sys-ele.com。
《战术导弹技术》 由中国航天科工集团公司主管、中国航天科工飞航技术研究院主办、航天导弹总体专业情报网协办,2014年入选中文核心期刊,被北大出版的《中文核心期刊要目总览》收录。本刊是为导弹的研究、设计、制造、试验、使用服务的综合性学术技术类刊物。主要刊登导弹和导弹武器系统总体技术,任务规划技术,制导、导航与控制技术,推进技术,计算机在导弹武器系统及其分系统中的应用技术等方面的学术技术论文。本刊入选俄罗斯《文摘杂志》(AJ)、《中国导弹与航天文摘(CAMA)》和《中国航空文摘》,为《中国学术期刊综合评价数据库》来源期刊,由《中国学术期刊(光盘版)》和“中国期刊网”全文收录;曾荣获航天科技期刊优秀奖。本刊1980年创刊,双月刊,国内外公开发行,大16开本,期定价20元,全年定价120元。中国标准刊号为ISSN1009-1300/CN11-1771/TJ。订阅本刊请与天津市大寺泉集北里别墅17号(300385)“联合征订服务部”联系,可上网www.LHZD.com索要订单;也可与北京7254信箱4分箱(100074)《战术导弹技术》编辑部联系订购,电话: 010-68375662,68375084(发行)。E-mail:zhanshu310@126.com;网址:http://www.haiying.org.cn。欢迎登录期刊网站在线投稿。
《飞航导弹》由中国航天科工集团公司主管、北京海鹰科技情报研究所主办,1992、1996、2004、2008、2011、2014年连续被北大图书馆出版的《中文核心期刊要目总览》收录,2012、2013、2014、2015年连续入选中国科技核心期刊。《飞航导弹》是航天导弹总体专业情报网网刊,为《中国学术期刊综合评价数据库》来源期刊,被《中国核心期刊(遴选)数据库》、《中国学术期刊(光盘版)》和《中国期刊网》全文收录。《飞航导弹》主要报道国外飞航武器系统总体技术、制导与控制技术、推进技术,包括飞航导弹、无人机、高超声速技术、临近空间飞行器的研制、试验、生产、装备、作战、改型以及相关的新技术、新材料和新工艺。本刊1971年创刊,月刊,是中文核心期刊和中国科技核心期刊,国内外公开发行,大16开本,期定价20元,年定价240元,全年合订本定价300元;中国标准刊号为ISSN1009-1319/CN11-1770/TJ。订阅本刊请与天津市大寺泉集北里别墅17号(300385)“联合征订服务部”联系,可上网www.LHZD.com索要订单;也可与北京7254信箱4分箱(100074)《飞航导弹》编辑部联系订购,电话: 010-68376009,68375084(发行部)。E-mail:310feihang@sina.com;网址:http://www.haiying.org.cn。欢迎登录期刊网站在线投稿。
《推进技术》是由中国航天科工集团公司主管、中国航天科工集团三十一研究所主办的全国优秀科技期刊,是国务院学位委员会和教育部研究生办联合指定的重要期刊。1980年创刊,月刊,内容涉及航空、航天和航海推进领域。主要刊登各类飞机、无人机、导弹、运载器和航天器的推进系统在理论研究、设计、实验等方面的学术论文。主要栏目有:学术前沿,气动热力学与总体,叶轮机械,燃烧与传热,结构、强度与振动,控制、测量与故障诊断,先进材料、推进剂与燃料,其它推进理论与应用。曾4次荣获航天科技期刊一等奖,两次荣获全国科技期刊评比二等奖,并荣获第二届国家期刊奖银奖,2002年~2005年,连续4次被评选为“百种中国杰出学术期刊”。2008年荣获“中国精品科技期刊”称号。2015年荣获由国家新闻出版广电总局组织评选的“百强报刊”称号。本刊被美国《工程索引》Ei的核心检索Ei Compendex数据库、美国《化学文摘》(CA)、美国《剑桥科学文摘》(CSA)、美国《国际宇航文摘》(IAA)、荷兰《文摘与引文数据库》Scopus、《中国核心期刊(遴选)数据库》、《中国期刊全文数据库》(CJFD)、《中国科技期刊数据库》等收录,是中国科技论文统计源期刊、中文核心期刊和中国学术期刊综合评价数据库 (CAJCED)统计刊源。2014年成功注册DOI编码。国际标准连续出版物号为ISSN1001-4055, 国内统一刊号为CN11-1813/V。国内外公开发行,大16开本,每期200页,每期定价50元。广告经营许可证号:京丰工商广字第8014号。邮发代号:80-937。欢迎订阅。联系电话:010-68191522,010-68376141;网址:http://www.tjjs.casic.cn/;通信地址:北京7208信箱26分箱(100074);E-mail:tjjs@sina.com。
《现代防御技术》(双月刊)是由中国航天科工集团公司主管,北京电子工程总体研究所主办的学术技术性刊物,中国宇航学会无人飞行器分会会刊。1973年创刊,双月刊,国内外公开发行。2004年起连续入编《中文核心期刊要目总览》,2008年起连续被收录为“中国科技核心期刊”(中国科技论文统计源期刊), 2009年被评为“RCCSE中国核心学术期刊”,2014年成为国家新闻出版广电总局第一批通过认证的科技学术期刊。主要刊登国内外防御技术,包括空天防御体系、战略战术、防空导弹武器系统总体、精确制导技术等方面的科技论文。主要栏目有:空天防御体系与武器,导弹技术,导航、制导与控制,指挥控制与通信,探测跟踪技术,军事电子信息系统,综合保障性技术,测试、发控技术,仿真技术等。本刊被多种文献数据库收录:如俄罗斯“文摘杂志”,清华知网,《万方数据——数字化期刊群》和《中国核心期刊(遴选)数据库》等。国内统一刊号为CN11-3019/TJ,国际标准刊号为ISSN 1009-086X,大16开本,逢双月末出版。2017年,每期约170页,单价20元,年定价120元。邮发代号2-443。通信地址:北京142信箱30分箱《现代防御技术》编辑部(100854)。电话:010-68388557,E-mail:xdfj@263.net,网址:www.xdfyjs.cn,作者请在网站http://www.xdfyjs.cn上在线注册投稿。
《计算机测量与控制》是由中国计算机自动测量与控制技术协会主办、中国航天科工集团公司主管的向国内、外公开发行的科技期刊。办刊宗旨是报道前沿技术、引领测控技术发展方向,突出前瞻性、导向性和实用性。是从事研究、设计、开发和应用计算机测试和控制技术的科研人员喜爱的科技刊物。本刊为中文核心期刊、中国科技核心期刊,国家百种重点期刊、被俄罗斯《文摘杂志》、英国《科学文摘》、美国《剑桥科学文摘》等著名的国外检索机构收录。刊出的论文体现了技术上的先进性、方法上的新颖性、工程上的实用性、设计上的导向性、内容丰富、信息量大、涵盖面广、适用面宽。栏目设有:专家论坛、综述与评论、自动化测试、控制技术、试验与验证技术、军事测控技术、设计与应用、软件工程技术、数采与处理等。本刊为月刊,大16开本,每期300多页,期定价30元,全年定价360元,在各地邮局订阅。错过订阅时间可随时向杂志社订阅。邮发代号:82-16。帐户:《计算机测量与控制》杂志社,帐号:11001085400059612076,开户行:建行北京阜成路支行,地址:北京海淀区阜成路甲8号航天科工大厦4层 《计算机测量与控制》杂志社收(100048)。电话: 010-68767886,68371556-12~18/23;传真:010-68372068,E-mail: ck@chinamca.com。
《计算机工程与设计》由中国航天科工集团主管,中国航天科工集团七O六所主办。报道计算机科学技术领域最新科研成果,刊载内容覆盖计算机领域各个学科,主要栏目:信息安全技术、网络与通信技术、嵌入式系统工程、软件与算法、多媒体技术、仿真技术、智能技术、抗恶劣环境技术、体系结构与外围设备、开发与应用等。该刊是中国计算机学会会刊,中国宇航学会会刊,入选北大中文核心期刊,中国科技核心期刊;被英国SA/INSPEC、俄罗斯AJ of VINITI、美国UPD、波兰IC、中国知网CNKI、中国学术期刊综合评价数据库等国内外著名检索机构收录;被中国学术期刊文摘、电子科技文摘收录。1980年创刊,月刊,定价38元/册。刊号:ISSN 1000-7024,CN 11-1775/TP。在邮局订阅,邮发代号82-425。通信地址:北京142信箱37分箱,邮编:100039。联系电话:010-68389884,010-88528214。投稿网址:www.china-ced.com,E-mail:ced@china-ced.com。欢迎踊跃投稿和订阅。
《计算机仿真》是由中国航天科工集团主管,北京控制与电子技术研究所主办,计算机仿真杂志社编辑出版发行的中国计算机用户协会会刊。旨在促进我国仿真技术交流和发展,既总结过去、探索基础理论,又跟踪发展前沿,重点报导仿真应用成果。内容包括仿真对象建模、仿真算法研究、仿真软件开发、仿真系统的设计与实现、仿真培训系统的研制、连续系统仿真、离散系统仿真、复杂系统仿真、统计仿真、优化仿真、定性仿真、智能仿真、虚拟仿真、分布交互式仿真、建模与仿真的VV&A、基于仿真的设计研究和采办,以及信息网络技术仿真等20个栏目。现已是北大中文核心期刊、中国科技论文核心期刊,于2003年被《中国科学文献计量评价研究中心》评为优秀期刊,同时被选入中国学术期刊(光盘版)文献检索系统、中国科学引文数据库等。本刊创刊于1984年,月刊,大16开本,国内外公开发行,可刊登广告。国内邮发代号为 82-773,全年定价360元(每期单价30元)。欢迎订阅。E-mail:jsjfz@vip.163.com; 投稿网址:www.jsjfz.com。
《系统仿真学报》是中国仿真学会会刊,1989年7月创刊,月刊;中国航天科工集团公司主管,北京仿真中心、中国仿真学会联合主办;本刊是全国中文核心期刊,影响因子、引文频次及下载量居同领域期刊前列,是中国仿真科学技术领域具有权威性、代表性的学术期刊,其宗旨是报道我国仿真科学与技术领域中具有国际、国内领先水平的科研成果,刊登具有创新性学术见解的研究论文,被国际文献检索数据库(Scopus)、美国Ulrch’s Periodicals Directory、英国科学文摘数据库(SA/INSPEC)、日本科学技术社数据库JST、中国科技期刊核心刊、中国科学引文数据库核心源、北大“中文期刊核心要目总览”、清华“中国学术期刊核心刊”、中国科协“中国学术期刊文摘”等收录;连续两次荣获“2013中国最具国际影响力学术期刊”“2014中国最具国际影响力学术期刊”称号;本刊为大16开,每期260页左右;定价50元,全年总价600元;邮发代号82-9,国内刊号CN11-3092/V,国际刊号ISSN1004-731X;通信地址:北京市142信箱13分箱系统仿真学报编辑部, 邮编100854;电话 010-88527147 / 010-68388709;http:∥www.china-simulation.com;E-mail: simu-xb@vip.sina.com。
《导航定位与授时》 由中国航天科工集团公司主管,北京自动化控制设备研究所、中国宇航出版有限责任公司主办的学术型双月刊。主要刊登导航与控制、定位与授时、仪表与部件、仿真与测试等方面的学术技术论文。本刊是中国宇航学会无人飞行器分会会刊、中国航天第四专业信息网网刊,由万方数据和中国知识资源总库全文收录。本刊2014年创刊,双月刊,国内公开发行,大16开本,每期108页左右,期定价20元,全年定价120元。中国标准刊号为ISSN2095-8110/CN10-1226/V。订阅请与天津市大寺泉集北里别墅17号(300385)“联合征订服务部”联系,电话: 022-23973378, 022-23962479;也可与北京7209信箱10分箱(100074)《导航定位与授时》编辑部联系订购,电话:010-88532644,68377087。E-mail:pnt333@126.com;网址:http://dhdwyss.zghtqk.com/ch/index.aspx。欢迎登录期刊网站在线投稿。
《航天电子对抗》由中国航天科工集团8511研究所主办,是中国宇航学会电磁信息专业委员会会刊,国内外公开发行。报道内容涉及与空间系统、导弹武器系统相关的雷达、制导与引信、通讯、导航、C4I等电子设备和系统的电子/光电攻防对抗技术等。主要报道电子/光电攻防对抗的最新技术、科研成果、工程设计和应用、性能检测与评估、模拟试验等论文与信息。本刊为《中国学术期刊(光盘版)》、《中国期刊网》的全文收录用刊,是“中国学术期刊综合评价数据库来源期刊”,并被多种文献数据库收录。1985年创刊,双月刊,大16开本,64页,期定价10元,年定价60元,中国标准刊号为ISSN1673-2421/CN32-1329/TN。订阅请与天津市大寺泉集北里别墅17号(300385)“联合征订服务部”联系,电话:022-23973378,022-23962479;也可与南京市1610信箱(210007)编辑部联系,电话:025-84638543;E-mail:htdz8511@126.com;传真:025-84498353。
《红外与激光工程》由中国航天科工集团公司主管,天津津航技术物理研究所主办,创刊于1972年,是国家新闻出版署批准的国内外公开发行的学术刊物。中国科技论文统计源期刊,中文核心期刊。被美国“工程索引(EI)compendex”,英国“科学文摘(SA)”,美国“剑桥科学文摘(CSA)”,俄罗斯“文摘杂志(AJ)”,日本“科学技术社数据库(JST)”,荷兰“斯高帕斯(Scopus)数据库”等收录。本刊是中国航天界光电子技术领域内学术性与工程应用性集于一体的综合性刊物,主要刊登国内红外与激光技术方面的学术论文和工程研究报告,集中反映中国光电技术的工程应用水平。期刊常设专栏包括红外技术及应用、激光与光电子技术应用、光学遥感与空间探测、光通信与光传感、光电测量、太赫兹、光谱成像等。本刊为大16开本,336页,月刊,期定价45元,年定价540元。国内刊号CN 12-1261/TN,国际刊号ISSN 1007-2276,邮发代号6-133。通信地址:天津市空港经济区中环西路58号(300308);联系电话:022-58168883,58168884,58168885;QQ群:275667167,164892997;微信号:irla83589;E-mail:irla8358@163.com;网址:http://www.irla.cn。欢迎登录期刊网站在线投稿。
《湖北航天科技》是中国航天科工集团所属中国三江航天集团和湖北省宇航学会联合创办的省级综合性双月刊。本刊宗旨是为国防现代化建设服务,为导弹武器系统的研制与生产服务,为军品研制、民品开发提供科技情报,广泛传播国内外航天科技知识与信息,交流科技成果,活跃学术气氛,启迪广大科技工作者的思路,为我国的现代化建设作出应有的贡献。本刊登载的主要内容有国内外战术导弹武器系统研制、生产、质量管理等方面的论文;推进与燃料、导航与制导、战斗部与引信、结构与强度、地面设备与发射装置等方面的研究报告;世界航天高技术发展动向与趋势;航天工业新技术、新工艺、新材料和新产品介绍;军工技术转民用以及各国导弹武器系统研制、生产、军贸动态等。《湖北航天科技》登记号为鄂内资准印证第2063/ZY号。1985年创刊,季刊,16开本,49页,逢季末20日出刊。投稿及通讯地址:武汉东西湖区金山大道9号《湖北航天科技》编辑部(430040)。电话:027-59392283;邮箱:hbhtkj@sohu.com。
《江南航天科技》由中国航天科工集团所属中国江南航天工业集团公司主办,1975年创刊,季刊,系内部刊物。贵州内部报刊准印证号:第07-KO78号。投稿与交换刊物,请与贵州省遵义市北京路36号(563003)联系,电话: 0851-8696064。
Research on Trajectory Planning of ROS-based Robot Arm
LIU Ru-jia, WANG Fang, ZHANG Qiang, LI Nan
(Aerospace Science & Industry Intelligence Robot Co. Ltd., Beijing 100074, China)
In case of the technical difficulties of the development in manipulator trajectory planning, a solution that builds a robotic arm control system based on an open source software platform (Robot Operating System, ROS) is put forward here. On this basis, an algorithm based on quintic polynomial interpolation is presented to cover the shortage of ROS algorithm on trajectory planning functions, and the simulation results show that the new algorithms can improve the control function of manipulator arm. And the method provides a reference to engineering manipulator arm trajectory planning.
Robot; Manipulator arm; ROS; Motion control; Trajectory planning
10.19306/j.cnki.2095-8110.2016.06.016
2015-10-28;
2016-01-10。
刘汝佳(1990 - ),男,硕士,主要从事机器人运动控制与软件设计方面的研究。E-mail:sansherlock@126.com
TP242.6
A
2095-8110(2016)06-0082-07
